GD32F427的脉冲计数功能(采用外部ETI配置)
中断可去除。
void ETI_gpio_config(void)
{
rcu_periph_clock_enable(RCU_GPIOE);
rcu_periph_clock_enable(RCU_GPIOD);
/*configure PE7(TIMER0_ETI) as alternate function*/
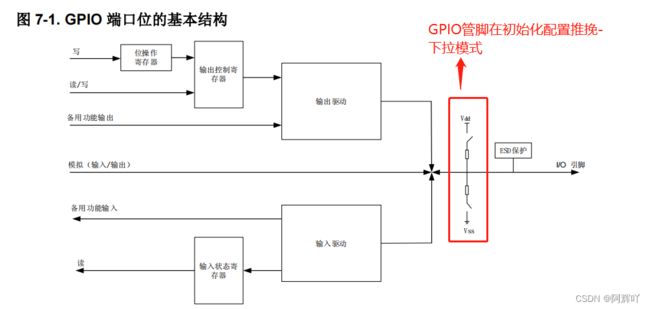
gpio_mode_set(GPIOE, GPIO_MODE_AF, GPIO_PUPD_PULLDOWN, GPIO_PIN_7);
gpio_output_options_set(GPIOE, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_7);
gpio_af_set(GPIOE, GPIO_AF_1, GPIO_PIN_7);
gpio_bit_reset(GPIOE, GPIO_PIN_7);
/*configure PD2(TIMER2_ETI) as alternate function*/
gpio_mode_set(GPIOD, GPIO_MODE_AF, GPIO_PUPD_PULLDOWN, GPIO_PIN_2);
gpio_output_options_set(GPIOD, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_2);
gpio_af_set(GPIOD, GPIO_AF_2, GPIO_PIN_2);
gpio_bit_reset(GPIOD, GPIO_PIN_2);
}
//脉冲计数定时器初始化TIMER0 TIMER2
void ETI_timer_config(void)
{
timer_parameter_struct timer_initpara;
/* 使能 TIMER0 TIMER2 外设时钟 */
rcu_periph_clock_enable(RCU_TIMER0);
rcu_periph_clock_enable(RCU_TIMER2);
/* 配置定时器时钟为CK_AHB总线时钟 */
rcu_timer_clock_prescaler_config(RCU_TIMER_PSC_MUL4);
/*复位定时器 TIMER0 TIMER2 */
timer_deinit(TIMER0);
timer_deinit(TIMER2);
/* TIMER0 TIMER2 parameter configuration */
timer_initpara.prescaler = 0;
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.period = 0x100;
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_initpara.repetitioncounter = 0;
timer_init(TIMER0,&timer_initpara);
timer_init(TIMER2,&timer_initpara);
//如果外部时钟模式 0 和外部时钟模式 1 同时被配置,外部时钟的输入是 ETIF
/* 定时器从模式选择 */
timer_slave_mode_select(TIMER0,TIMER_SLAVE_MODE_EXTERNAL0);
timer_slave_mode_select(TIMER2,TIMER_SLAVE_MODE_EXTERNAL0);
/* 从模式配置寄存器(TIMERx_SMCFG) TRGS[2:0] 用来指定选择哪一个信号作为用来同步计数器的触发输入源 */
timer_input_trigger_source_select(TIMER0, TIMER_SMCFG_TRGSEL_ETIFP);
timer_input_trigger_source_select(TIMER2, TIMER_SMCFG_TRGSEL_ETIFP);
/* 从模式配置寄存器(TIMERx_SMCFG[14]) SMC1 从模式控制=>外部时钟模式1配置 */
timer_external_clock_mode1_config(TIMER0, TIMER_EXT_TRI_PSC_OFF, TIMER_ETP_RISING, 0X0);
timer_external_clock_mode1_config(TIMER2, TIMER_EXT_TRI_PSC_OFF, TIMER_ETP_RISING, 0X0);
/* 使能定时器主-从模式 */
timer_master_slave_mode_config(TIMER0, TIMER_MASTER_SLAVE_MODE_ENABLE);
timer_master_slave_mode_config(TIMER2, TIMER_MASTER_SLAVE_MODE_ENABLE);
/* 清空定时器计数值 */
timer_counter_value_config(TIMER0, 0);
timer_counter_value_config(TIMER2, 0);
/* NVIC 中断组选择 */
nvic_priority_group_set(NVIC_PRIGROUP_PRE1_SUB3);
/* 清除中断标志位 */
timer_interrupt_flag_clear(TIMER0, TIMER_INT_FLAG_UP);
timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);
/* NVIC 中断配置 */
nvic_irq_enable(TIMER0_TRG_CMT_TIMER10_IRQn, 0, 0);
nvic_irq_enable(TIMER2_IRQn, 0, 0);
/* 使能中断标志位 */
timer_interrupt_enable(TIMER0, TIMER_INT_UP);
timer_interrupt_enable(TIMER2, TIMER_INT_UP);
/* 使能定时器 */
timer_enable(TIMER0);
timer_enable(TIMER2);
}
void TIMER0_TRG_CMT_TIMER10_IRQHandler(void)
{
if (SET == timer_interrupt_flag_get(TIMER0, TIMER_INT_FLAG_UP))
{
/* 清除更新中断标志 */
timer_interrupt_flag_clear(TIMER0, TIMER_INT_FLAG_UP);
}
}
void TIMER2_IRQHandler(void)
{
if (SET == timer_interrupt_flag_get(TIMER2, TIMER_INT_FLAG_UP))
{
/* 清除更新中断标志 */
timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);
}
}
int ETI_FUNC(void)
{
ETI_gpio_config();
ETI_timer_config();
while(1)
{
delay_1ms(100);
printf("TIMER0 cnt = 0x%x ,dir %d\r\n",TIMER_CNT(TIMER0),(TIMER_CTL0(TIMER0)&TIMER_CTL0_DIR)==TIMER_CTL0_DIR);
printf("TIMER2 cnt = 0x%x ,dir %d\r\n",TIMER_CNT(TIMER2),(TIMER_CTL0(TIMER2)&TIMER_CTL0_DIR)==TIMER_CTL0_DIR);
}
}