OpenCV分水岭算法详解
原理分析
分水岭算法主要用于图像分段,通常是把一副彩色图像灰度化,然后再求梯度图,最后在梯度图的基础上进行分水岭算法,求得分段图像的边缘线。
下面左边的灰度图,可以描述为右边的地形图,地形的高度是由灰度图的灰度值决定,灰度为0对应地形图的地面,灰度值最大的像素对应地形图的最高点。

灰度图的地形图显示,比如上边的灰度图,显示为:

对灰度图的地形学解释,我们我们考虑三类点:
1. 局部最小值点,该点对应一个盆地的最低点,当我们在盆地里滴一滴水的时候,由于重力作用,水最终会汇聚到该点。注意:可能存在一个最小值面,该平面内的都是最小值点。
2. 盆地的其它位置点,该位置滴的水滴会汇聚到局部最小点。
3. 盆地的边缘点,是该盆地和其它盆地交接点,在该点滴一滴水,会等概率的流向任何一个盆地。

假设我们在盆地的最小值点,打一个洞,然后往盆地里面注水,并阻止两个盆地的水汇集,我们会在两个盆地的水汇集的时刻,在交接的边缘线上(也即分水岭线),建一个坝,来阻止两个盆地的水汇集成一片水域。这样图像就被分成2个像素集,一个是注水盆地像素集,一个是分水岭线像素集。
下面的gif图很好的演示了分水岭算法的效果:
在真实图像中,由于噪声点或者其它干扰因素的存在,使用分水岭算法常常存在过度分割的现象,这是因为很多很小的局部极值点的存在,比如下面的图像,这样的分割效果是毫无用处的。

为了解决过度分割的问题,可以使用基于标记(mark)图像的分水岭算法,就是通过先验知识,来指导分水岭算法,以便获得更好的图像分段效果。通常的mark图像,都是在某个区域定义了一些灰度层级,在这个区域的洪水淹没过程中,水平面都是从定义的高度开始的,这样可以避免一些很小的噪声极值区域的分割。
下面的gif图很好的演示了基于mark的分水岭算法过程:
上面的过度分段图像,我们通过指定mark区域,可以得到很好的分段效果:

距离变换图

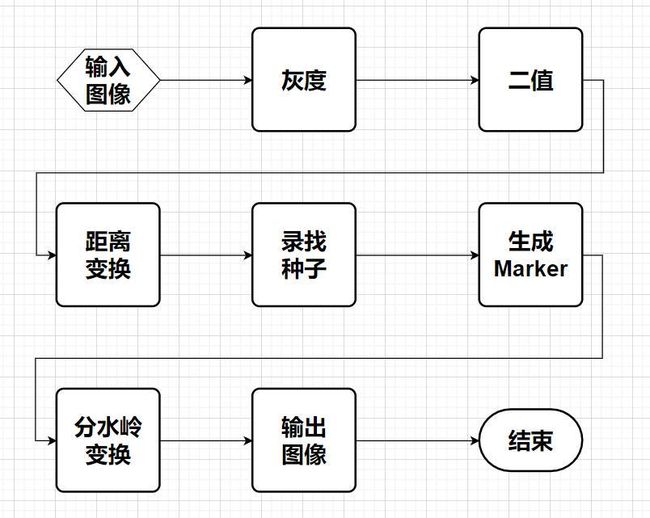
分水岭算法流程图
使用分水岭算法进行图像分割
(一)获取灰度图像,二值化图像,进行形态学操作,消除噪点
def watershed_demo(image):
blur = cv.pyrMeanShiftFiltering(image,10,100)
gray = cv.cvtColor(blur,cv.COLOR_BGR2GRAY) #获取灰度图像
ret,binary = cv.threshold(gray,0,255,cv.THRESH_BINARY|cv.THRESH_OTSU) #将图像转为黑色和白色部分
cv.imshow("binary",binary) #获取二值化图像
#形态学操作,进一步消除图像中噪点
kernel = cv.getStructuringElement(cv.MORPH_RECT,(3,3))
#iterations连续两次开操作,消除图像的噪点
mb = cv.morphologyEx(binary,cv.MORPH_OPEN,kernel,iterations=2) 
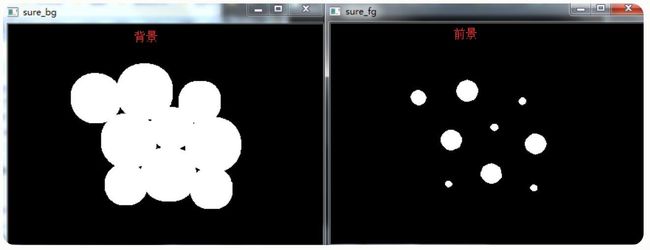
(二)在距离变换前加上一步操作:通过对上面形态学去噪点后的图像,进行膨胀操作,可以得到大部分都是背景的区域(原黑色不是我们需要的部分是背景)
#3次膨胀,可以获取到大部分都是背景的区域
sure_bg = cv.dilate(mb,kernel,iterations=3) 
(三)使用距离变换distanceTransform获取确定的前景色
根据distanceTransform操作的结果,设置一个阈值,使用threshold决定哪些区域是前景,这样得到正确结果的概率很高
#获取距离数据结果
dist = cv.distanceTransform(mb,cv.DIST_L2,5)
#获取前景色
ret, sure_fg = cv.threshold(dist,dist.max()*0.6,255,cv.THRESH_BINARY) 
相关知识补充(重点)
(1)距离变换原理
距离变换的处理图像通常都是二值图像,而二值图像其实就是把图像分为两部分,即背景和物体两部分,物体通常又称为前景目标!
通常我们把前景目标的灰度值设为255,即白色
背景的灰度值设为0,即黑色。
所以定义中的非零像素点即为前景目标,零像素点即为背景。
所以图像中前景目标中的像素点距离背景越远,那么距离就越大,如果我们用这个距离值替换像素值,那么新生成的图像中这个点越亮。

再通过设定合理的阈值对距离变换后的图像进行二值化处理,则可得到去除手指的图像(如下图“bidist”窗口图像所示),手掌重心即为该图像的几何中心。

(2)distanceTransform函数
主要用于计算非零像素到最近零像素点的最短距离。一般用于求解图像的骨骼
# real signature unknown; restored from __doc__
def distanceTransform(src, distanceType, maskSize, dst=None, dstType=None): src:输入的图像,一般为二值图像
distanceType:所用的求解距离的类型,有CV_DIST_L1, CV_DIST_L2 , or CV_DIST_C
mask_size:距离变换掩模的大小,可以是 3 或 5. 对 CV_DIST_L1 或 CV_DIST_C 的情况,参数值被强制设定为 3, 因为 3×3 mask 给出 5×5 mask 一样的结果,而且速度还更快。
(3)若是想骨骼显示(对我们的分水岭流程无影响),我们需要对distanceTransform返回的结果进行归一化处理,使用normalize
因为distanceTransform返回的图像数据是浮点数值,要想在浮点数表示的颜色空间中,数值范围必须是0-1.0,所以要将其中的数值进行归一化处理
(重点)在整数表示的颜色空间中,数值范围是0-255,但在浮点数表示的颜色空间中,数值范围是0-1.0,所以要把0-255归一化。
顺便补充:若是不做归一化处理,数值大于1的都会变为1.0处理
mb = cv.morphologyEx(binary,cv.MORPH_OPEN,kernel,iterations=2) #iterations连续两次开操作
cv.imshow("mb", mb) #这是我们形态学开操作过滤噪点后的图像,暂时可以看做源图像
#距离变换
dist = cv.distanceTransform(mb,cv.DIST_L2,5) #这是我们获取的字段距离数值,对应每个像素都有,所以数组结构和图像数组一致
cv.imshow("dist",dist)
dist_output = cv.normalize(dist,0,1.0,cv.NORM_MINMAX) #归一化的距离图像数组
cv.imshow("distinct-t",dist_output*50)
发现了似乎distanceTransform返回的图像和源图像一样,似乎出错了
原因:因为distanceTransform返回的是浮点型色彩空间,而dist中存放的数距离0值的最小距离,大多是大于1.0的数值,
而上面提到浮点型色彩空间数值范围0-1.0,当数值大于1.0都会被设置为1.0,显示白色,所以和原来的二值化图像一致,
我们要想显示骨骼,必须先进行归一化处理
下面是从二值化图像源,distanceTransform距离数组,和归一化距离数组中获取的一段像素数组
print(mb[150][120:140])
print(dist[150][120:140])
print(dist_output[150][120:140])整数型色彩空间二值化图像
[ 0 0 0 0 0 0 0 0 0 255 255 255 255 255 255 255 255 255
255 255]浮点型色彩空间最小距离数组,由于数值大于1.0都会被设置为1.0,所以和上面二值化图像一致
[ 0. 0. 0. 0. 0. 0. 0.
0. 0. 1. 1.4 2.1969 3.1969 4.1969
5.1969 6.1969 7.1969 8.196899 9.196899 10.187599]浮点型色彩空间归一化数组图像,显示骨骼
[0. 0. 0. 0. 0. 0.
0. 0. 0. 0.00047065 0.0006589 0.00103396
0.00150461 0.00197525 0.00244589 0.00291654 0.00338719 0.00385783
0.00432847 0.00479474](四)在获取了背景区域和前景区域(其实前景区域是我们的种子,我们将从这里进行灌水,向四周涨水,但是这个需要在markers中表示)后,这两个区域中有未重合部分(注1)怎么办?首先确定这些区域(寻找种子)
这里是求取硬币偏白色,使用THRESH_BINARY,所以我们获取对象是白色区域,是获取未重合部分,若是我们求取树叶等偏黑,需要使用THRESH_BINARY_INV,此时我们获取的对象是黑色区域,就变为了获取重合部分了。
开始获取未知区域unknown(栅栏会创建在这一区域),为下一步获取种子做准备
#保持色彩空间一致才能进行运算,现在是背景空间为整型空间,前景为浮点型空间,所以进行转换
surface_fg = np.uint8(sure_fg)
unknown = cv.subtract(sure_bg,surface_fg)
cv.imshow("unkown",unknown)使用print查看背景前景色彩空间不同
print(sure_fg[150][120:140])
print(sure_bg[150][120:140])输出结果
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.]
[ 0 0 0 0 0 0 255 255 255 255 255 255 255 255 255 255 255 255
255 255]
(五)获取了这些区域,我们可以获取种子,这是通过connectedComponents实现,获取masker标签,确定的前景区域会在其中显示为以1开始的数据,这就是我们的种子,会从这里开始漫水
利用connectedComponents求图中的连通图现在知道了那些是背景那些是硬币(确定的前景区域)了。那我们就可以创建标签(一个与原图像大小相同,数据类型为 in32 的数组),并标记其中的区域了。对我们已经确定分类的区域(无论是前景还是背景)使用不同的正整数标记,对我们不确定的区域(unknown区域)使用 0 标记。我们可以使用函数 cv2.connectedComponents()来做这件事。它会把对标签进行操作,将背景标记为 0,其他的对象使用从 1 开始的正整数标记(其实这就是我们的种子,水漫时会从这里漫出)。然后将这个标签返回给我们markers,但是,我们知道如果背景标记为 0,那分水岭算法就会把它当成未知区域了。(我们要将未知区域标记为0,所以我们要将背景区域变为其他整数,例如+1)
所以我们想使用不同的整数标记它们。而对不确定的区域(函数cv2.connectedComponents 输出的结果中使用 unknown 定义未知区域)标记为 0。
#获取mask
ret,markers = cv.connectedComponents(surface_fg)函数原型:
def connectedComponents(image, labels=None, connectivity=None, ltype=None): # real signature unknown; restored from __doc__参数:
参数image是需要进行连通域处理的二值图像,其他的这里用不到
返回值:
ret是连通域处理的边缘条数,是上面提到的确定区域(出去背景外的其他确定区域:就是前景),就是种子数,我们会从种子开始向外涨水
markers是我们创建的一个标签(一个与原图像大小相同,数据类型为 in32 的数组),其中包含有我们原图像的确认区域的数据(前景区域)
查看部分markers:(0代表的是背景色,)

(六)根据未知区域unknown在markers中设置栅栏,并将背景区域加入种子区域,一起漫水
watershed漫水算法需要我们将栅栏区域设置为0,所以我们需要将markers中背景区域(原来为0,会干扰算法)设置为其他整数。
解决方法将markers整体加一 #此时种子区域不止我们原来的前景区域,有增加了一个背景区域,我们将从这些区域一起灌水。
markers = markers + 1
markers[unknown==255] = 0(七)根据种子开始漫水,让水漫起来找到最后的漫出点(栅栏边界),越过这个点后各个山谷中水开始合并。注意watershed会将找到的栅栏在markers中设置为-1
markers = cv.watershed(image,markers=markers) #获取栅栏
image[markers==-1] = [0,0,255] #根据栅栏,我们对原图像进行操作,对栅栏区域设置为红色markers再次查看

(八)结果查看

(九)全部代码
import cv2 as cv
import numpy as np
def watershed_demo(image):
blur = cv.pyrMeanShiftFiltering(image,10,100)
gray = cv.cvtColor(blur,cv.COLOR_BGR2GRAY) #获取灰度图像
ret,binary = cv.threshold(gray,0,255,cv.THRESH_BINARY|cv.THRESH_OTSU)
#形态学操作,进一步消除图像中噪点
kernel = cv.getStructuringElement(cv.MORPH_RECT,(3,3))
mb = cv.morphologyEx(binary,cv.MORPH_OPEN,kernel,iterations=2) #iterations连续两次开操作
sure_bg = cv.dilate(mb,kernel,iterations=3) #3次膨胀,可以获取到大部分都是背景的区域
cv.imshow("sure_bg",sure_bg)
#距离变换
dist = cv.distanceTransform(mb,cv.DIST_L2,5)
cv.imshow("dist",dist)
dist_output = cv.normalize(dist,0,1.0,cv.NORM_MINMAX)
# print(mb[150][120:140])
# print(dist[150][120:140])
# print(dist_output[150][120:140])
cv.imshow("distinct-t",dist_output*50)
ret, sure_fg = cv.threshold(dist,dist.max()*0.6,255,cv.THRESH_BINARY)
cv.imshow("sure_fg",sure_fg)
# print(sure_fg[150][120:140])
# print(sure_bg[150][120:140])
#获取未知区域
surface_fg = np.uint8(sure_fg) #保持色彩空间一致才能进行运算,现在是背景空间为整型空间,前景为浮点型空间,所以进行转换
unknown = cv.subtract(sure_bg,surface_fg)
cv.imshow("unkown",unknown)
#获取maskers,在markers中含有种子区域
ret,markers = cv.connectedComponents(surface_fg)
#print(ret)
#分水岭变换
markers = markers + 1
markers[unknown==255] = 0
markers = cv.watershed(image,markers=markers)
image[markers==-1] = [0,0,255]
cv.imshow("result",image)
src = cv.imread("./c.png") #读取图片
cv.namedWindow("input image",cv.WINDOW_AUTOSIZE) #创建GUI窗口,形式为自适应
cv.imshow("input image",src) #通过名字将图像和窗口联系
watershed_demo(src)
cv.waitKey(0) #等待用户操作,里面等待参数是毫秒,我们填写0,代表是永远,等待用户操作
cv.destroyAllWindows() #销毁所有窗口