USART串口协议
通信接口
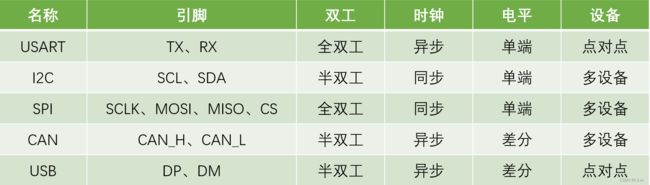
全双工:指通信双方能够同时进行双向通信,一般来说,全双工的通信都有两根通信线,发送线路和接收线路互不影响;
半双工:数据传输指数据可以在一个信号载体的两个方向上传输,但是不能同时传输;
单工:指数据只能从一个设备到另一个设备,不可以反着来;
时钟的作用:如果输出了一段高电平的波形,就是依靠时钟来判断波形是两个高电平信号还是一个高电平信号,即告诉接收方什么时候需要采集数据,I2C和SPI都有单独的时钟线,接收方可以在时钟信号的指引下进行采样,其他的没有时钟线,所以需要双方约定一个采样频率,为异步通信;
电平:单端:引脚的高低电平都是对GND的电压差,所以单端信号通信的双方都必须要共地,即把GND接在一起;差分:靠两个差分引脚的电压差来传输信号的,在通信时可以不需要GND,差分信号可以极大地提高抗干扰特性,所以差分信号的传输速度和距离都会非常高。
设备特性:多设备:可以在总线上挂载多个设备,还需要寻址的操作 ;点对点:两个设备直接传输数据;
串口



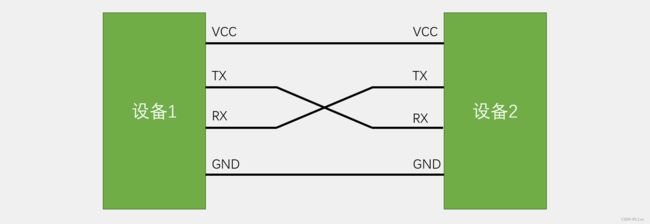
硬件电路
电平标准
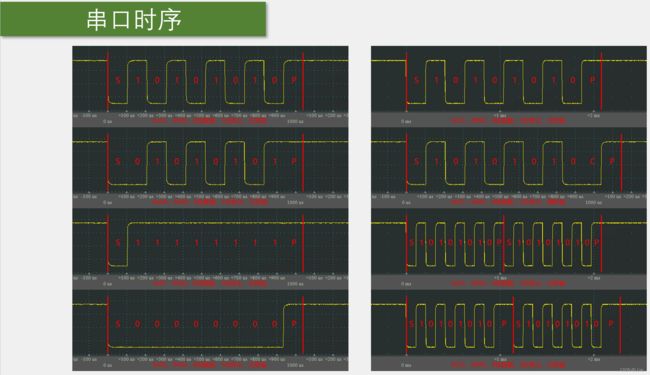
串口参数及时序
USART简介
USART框图
引脚处只需要注意TX(发送)和RX(接收)引脚即可
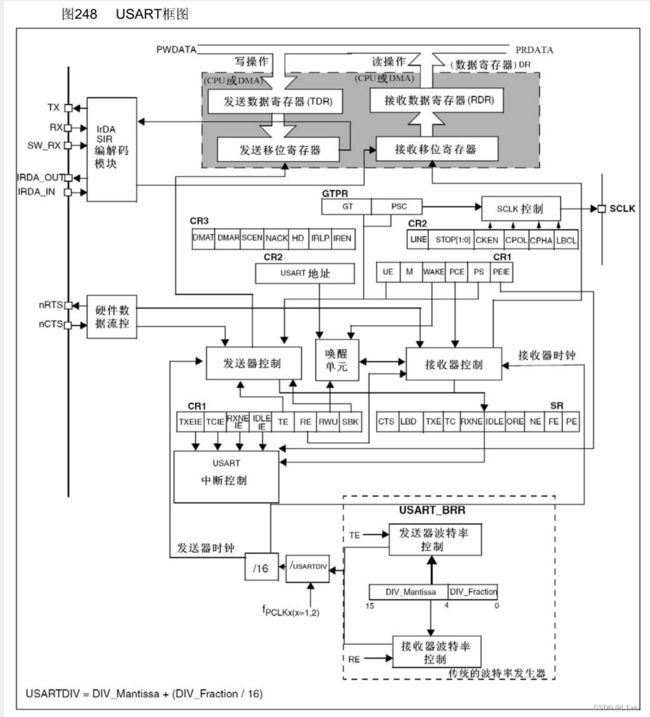
发送数据寄存器和接收数据寄存器共用一个地址DR的,TDR是只写的,RDR是只读的,当我们想要写入DR时,写入的是TDR,读出DR时,读出的是RDR。
发送移位寄存器工作方式:当我们给TDR写入一个数据时,此时硬件检测到写入数据了,就会检查当前移位寄存器是否有数据正在移位,如果没有,那么我们输入的数据就会立刻全部移动到发送移位寄存器中,准备发送,在数据从TDR移动到移位寄存器时,会置一个标志位TXE,发送寄存器空,我们就可以检查这个标志位,如果置1了,我们就可以给TDR写入下一个数据了。然后发送移位寄存器就会在发生器控制的驱动下,向右一位一位地把数据输出到TX引脚(低位先行),当移位完成后,新的数据就会再次自动地从TDR转移到发送移位寄存器中来;如果移位寄存器中的数据还未移位完成,那么TDR就会进行等待,一旦移位完成就会立马把数据转移过来。(双重缓存)
接收移位寄存器同理。置的标志位位RXNE
SCLK:作用1可以兼容别的协议,作用2可以做自适应波特率
硬件数据流控制:用得少,不解释
唤醒单元:可以用来实现多设备通信的功能
波特率发生器部分:实际上就是分频器,USART1挂载在APB2,所以就是PCLK2的时钟,一般是72M,其他的USART都挂载在APB1,所以是PCLK1的时钟,一般是36M,之后这个时钟进行一个分频,除一个USARTDIV的分频系数,之后分频完之后再除个16,的带发送器时钟和接收器时钟,通向控制部分。如果TE为1,则发送部分的波特率有效,RE为1,则接收部分的波特率有效。
USART基本结构

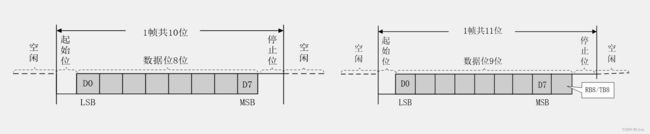
数据帧
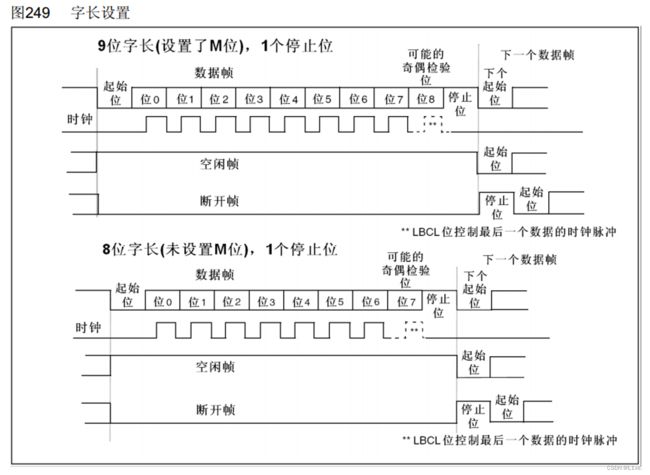
字长设置
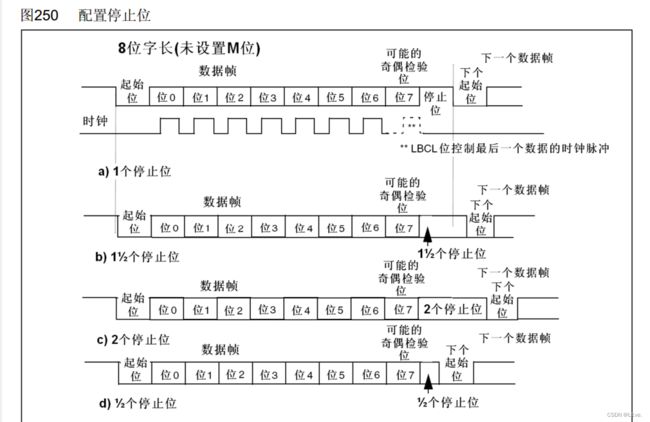
停止位
起始位侦测(排除噪声)(P26-25:36)
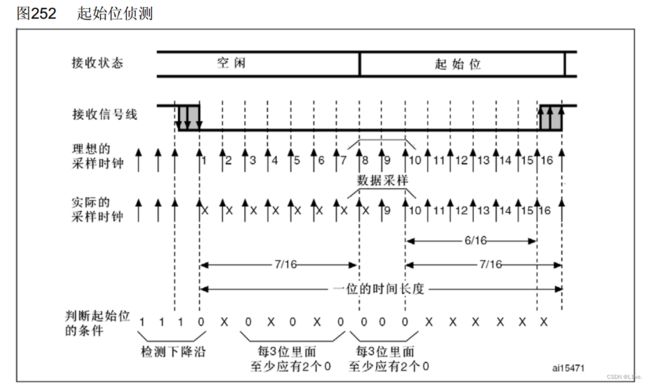
数据采样

波特率发生器
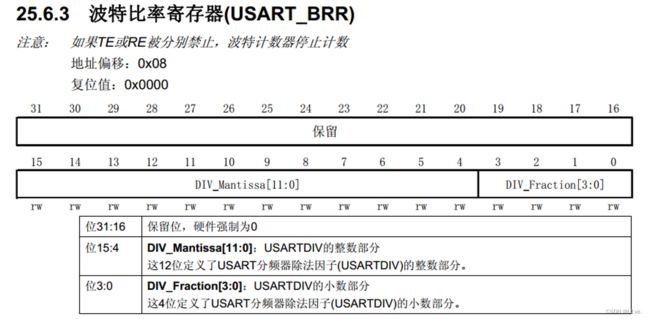
DIV分为整数部分和小数部分,可以实现更细腻的分频
代码实操
串口发送
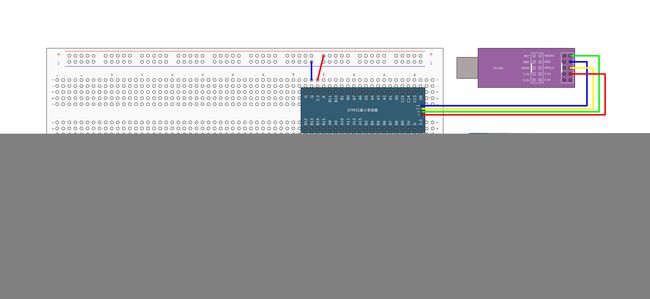
根据引脚定义,我们计划使用USART1的TX和RX引脚,所以要接到PA9和PA10上,注意接收脚和发送脚要交替相接;
介绍相关函数
老朋友
void USART_DeInit(USART_TypeDef* USARTx);
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
void USART_StructInit(USART_InitTypeDef* USART_InitStruct);
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
配置同步时钟输出(时钟是否需要输出,时钟的极性相位等)
void USART_ClockInit(USART_TypeDef* USARTx, USART_ClockInitTypeDef* USART_ClockInitStruct);
void USART_ClockStructInit(USART_ClockInitTypeDef* USART_ClockInitStruct);
开启USART到DMA的触发通道
void USART_DMACmd(USART_TypeDef* USARTx, uint16_t USART_DMAReq, FunctionalState NewState);
发送数据和接收数据(即写DR寄存器和读DR寄存器)
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
四个标志位函数(完成和中断)
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
void USART_ClearFlag(USART_TypeDef* USARTx, uint16_t USART_FLAG);
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
按照下图流程编写初始化函数
1、开启时钟,把需要用到的USART和GPIO的时钟打开
//开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);2、GPIO初始化,把TX配置成复用输出,RT配置成输入
//GPIO
GPIO_InitTypeDef GPIO_InitStructure;
//TX是USART外设控制的输出脚,使用复用推挽输出
//RX是USART外设数据输入表,使用输入模式
//因为串口波形空闲状态时高电平,所以一般使用浮空输入或者上拉输入
//此代码只需要发送
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);3、配置USART
//USART
USART_InitTypeDef USART_InitStructure;
//波特率(直接写我们需要的波特率即可,函数可以帮我们算好相对应的分频系数
USART_InitStructure.USART_BaudRate = 9600;
//硬件流控制(只使用RTX或者CTX、或者不用、或者都用)
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
//USART模式(TX或者RX,当两者都想用时就可以使用|符号,类似GPIO选择两个引脚)
USART_InitStructure.USART_Mode = USART_Mode_Tx;
//校验(Odd奇校验,Even偶校验,No无)
USART_InitStructure.USART_Parity = USART_Parity_No;
//停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
//字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
4、开启开关(如果需要接收信息,还需要配置中,这样就需要再加上ITConfig和NVIC的代码)
USART_Cmd(USART1, ENABLE);
5、创建一个发送数据的函数
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
//判断TDR的数据是否转移到移位寄存器
//第二个参数:传输数据寄存器TDR空标志
//在数据手册25.6.1中对TXE描述为再次对DR进行写操作时,即再次调用SendData函数时
//标志位会自动置0,所以我们不用手动清零了
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
再在主函数中调用试一下
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
int main(void)
{
OLED_Init();
Serial_Init();
Serial_SendByte(0x41);
while(1)
{
}
}
得到
