【单片机】15-AD和DA转换

1.AD转换及其相关背景知识
1.基本概念
1.什么是AD转换?
A(A,analog,模拟的,D,digital,数字的)
现实世界是模拟的,连续分布的,无法被分成有限份;
计算机世界是数字的,离散分布的,可以被分成有限份的
AD转换就是把一个物理量从模拟的转换成数字的。
2.AD转换的意义
想要计算机来实现现实世界
3.什么情况下需要AD转换
CPU是数字的【要准确的0V或者5V】
2.AD转换的原理
1.比较器
将差一点的电压转换为准确的二进制
所有的AD转换芯片内部都是用比较器来实现的。
2.和十进制转二进制有点像
使用除法

3.AD转换中的主要概念
1.位数
AD转换后转出来的二进制数由几位二进制来表示。【实际结果是一样大】
位数越多,越细腻。【精度越高】

2.量程
AD转换器可以接受的模拟量的范围
3.精度
精度==准确度
简单理解就是转出来有多准
【精度越小可靠率越高】

4.分辨率
AD转换器转出来的二进制数,每一格表示多少
5.转换速率(转换时间)
时间越短,速率越大
6.例子
输入电压范围:0-5V,AD转换输出位数是10,精度是0.01V
量程:0-5V
分辨率:(5-0)/2exp(10)=0.00488V
比如一次AD转换后得到数据为:【1010101010】,对应电压值:1010101010-->十进制:682,电压=682*0.00488=3.328V,考虑精度后为=3.33V
4.AD转换在系统中存在的方式
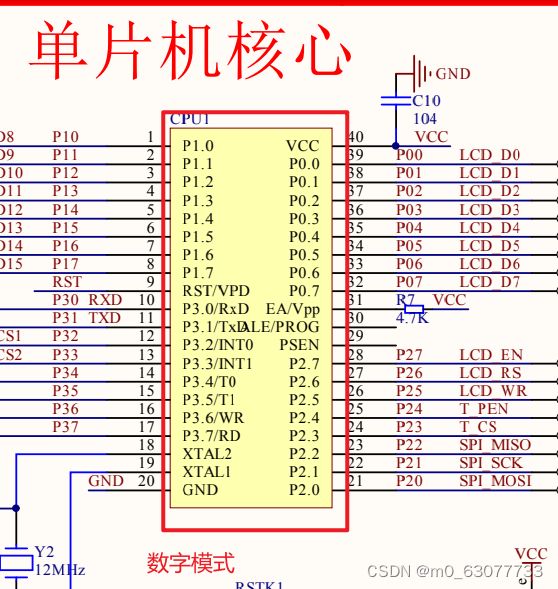
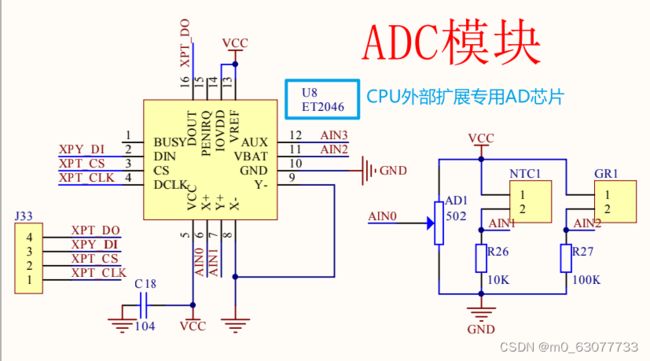
1.CPU外部扩展专用AD芯片
2.CPU内部集成AD模块(内部外设)
2.原理图和数据手册
https://www.semiee.com/file/ETEK/ETEK-ET2046.pdf
1.原理图
2.数据手册



AIN0-AIN3:不能同时采集,同一时间只能采集一路

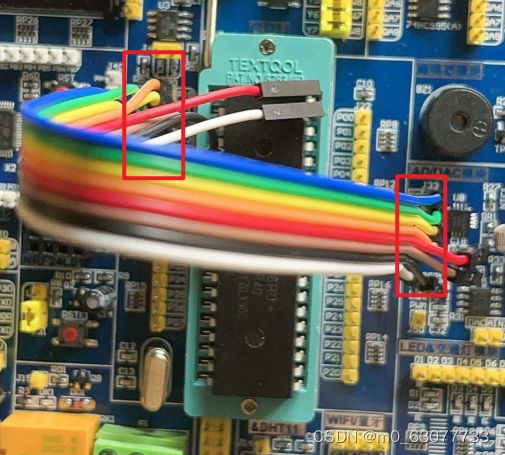
3.SPI接线
CLK接P1.0
CS接P1.1
DI接P1.2
DO接P1.3

4.3种模拟电压变化原理
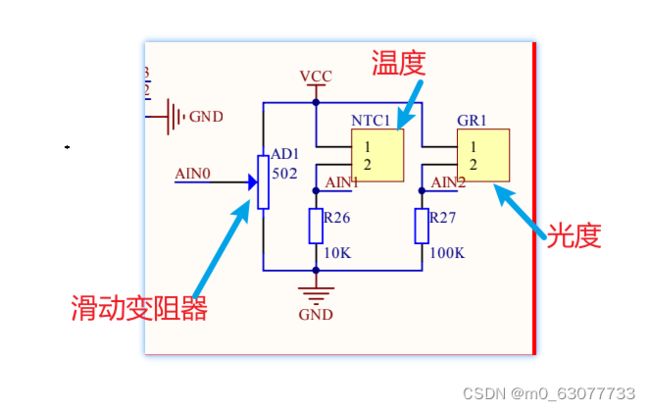
AIN0靠滑动变阻器控制电压变化
AIN1靠热敏电阻NTC
AIN2靠光敏电阻
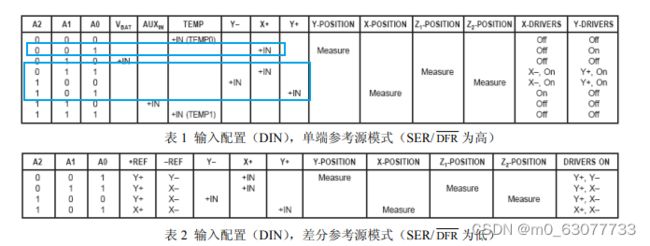
5.ET2046控制字
bit7:起始位【高表示开始传输】:1
bit6-bit4:决定采样哪一路(AIN1,AIN0,AINT2,AINT3):
AIN0:001/011 X+
AIN1:101 Y+
AIN2:010 VBAT
AIN3:110 VBAT
bit3:设置ADC精度:【1:使用bit8位】【0:使用bit12位--一般使用这个】:0
bit2:【1:表示用单端模式】【0:表示差分模式(触摸屏)】:1
bit1:power down模式使能,00表示使能
读AIN0:0b 1001 0100=0x94
读AIN1:0b 1101 0100=0xd4
读AIN2;0b 1010 0100=0xa4
读AIN3:0b 1110 0100=0xe4

AIN0:001/011 X+
AIN1:101 Y+
AIN2:010 VBAT
AIN3:110 VBAT

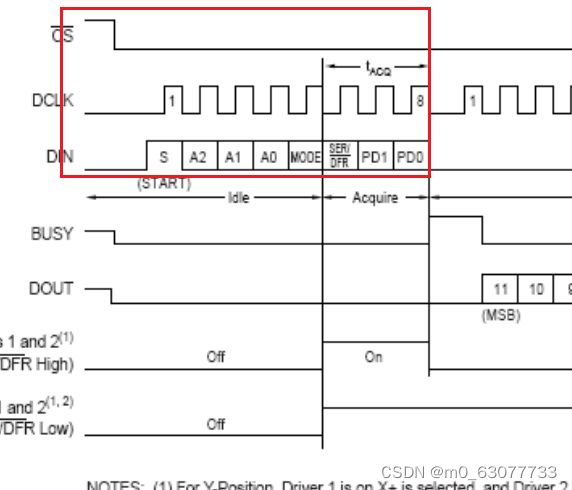
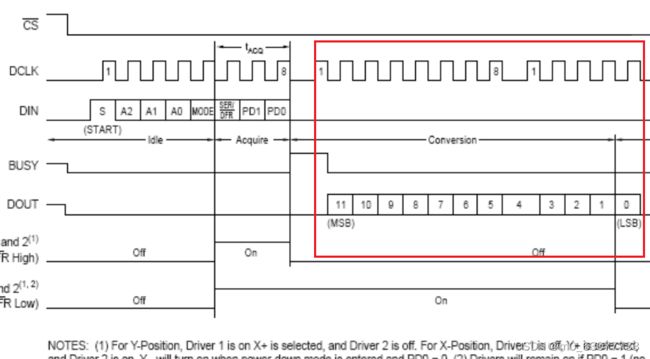
3.分析时序
1.时序图
1.SPI变种
回顾SPI知识点:
【单片机】13-实时时钟DS1302-CSDN博客
有CS,DCLK,I/O

2.上升沿写入下降沿读出
之前DS1302(SPI)的时候也是这样
上升沿写入:当CLK为上升沿的时候,数据通过DI从SPI主设备写入到SPI从设备
下降沿读出:当CLK为下降沿的时候,数据通过DO从SPI从设备读入到SPI主设备
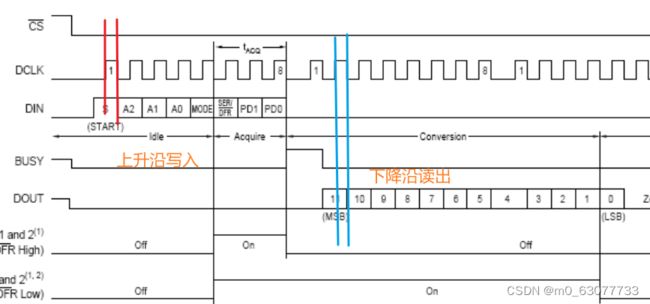
3.读写都是高位在前
之前DS1302(SPI)的时候是低位在前

4.注意写和读的交界点
2.官方例程分析
1.ET2046写数据
/*******************************************************************************
* 函 数 名 : xpt2046_wirte_data
* 函数功能 : XPT2046写数据
* 输 入 : dat:写入的数据
* 输 出 : 无
*******************************************************************************/
void xpt2046_wirte_data(u8 dat)
{
u8 i;
CLK = 0;//可以忽略的
_nop_();
for(i=0;i<8;i++)//循环8次,每次传输一位,共一个字节
{
//先准备好数据,在置CLK=0
DIN = dat >> 7;//先传高位再传低位
dat <<= 1;//将低位移到高位
CLK = 0;//CLK由低到高产生一个上升沿,从而写入数据
_nop_();
CLK = 1;
_nop_();
}
}2.ET2046读数据
/*******************************************************************************
* 函 数 名 : xpt2046_read_data
* 函数功能 : XPT2046读数据
* 输 入 : 无
* 输 出 : XPT2046返回12位数据
*******************************************************************************/
u16 xpt2046_read_data(void)
{
u8 i;
u16 dat=0;
CLK = 0;
_nop_();
for(i=0;i<12;i++)//循环12次,每次读取一位,大于一个字节数,所以返回值类型是u16
{
dat <<= 1;
CLK = 1;
_nop_();
CLK = 0; //CLK由高到低产生一个下降沿,从而读取数据
_nop_();
dat |= DOUT;//先读取高位,再读取低位。
}
return dat;
}3.ET2046返回AD值

/*******************************************************************************
* 函 数 名 : xpt2046_read_adc_value
* 函数功能 : XPT2046读AD数据
* 输 入 : cmd:指令
* 输 出 : XPT2046返回AD值
*******************************************************************************/
u16 xpt2046_read_adc_value(u8 cmd)
{
u8 i;
u16 adc_value=0;
CLK = 0;//先拉低时钟
CS = 0;//使能XPT2046
xpt2046_wirte_data(cmd);//发送命令字
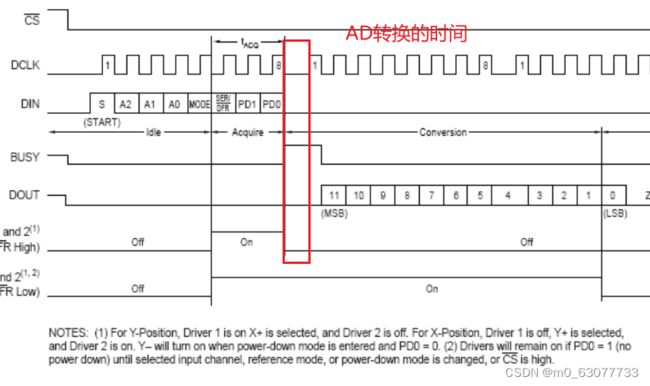
for(i=6; i>0; i--);//延时等待转换结果,这个时候进行AD转换
CLK = 1;//发送应该
_nop_();
CLK = 0;//发送一个时钟,清除BUSY
_nop_();
adc_value=xpt2046_read_data();
CS = 1;//关闭XPT2046
return adc_value;
}4.main函数
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
u16 adc_value=0;
float adc_vol;//ADC电压值
u8 adc_buf[3];
while(1)
{
//0x94:对应AINT0--0b 1001 1100
adc_value=xpt2046_read_adc_value(0x94);//测量电位器
adc_vol=5.0*adc_value/4096;//将读取的AD值转换为电压
adc_value=adc_vol*10;//放大10倍,即保留小数点后一位
adc_buf[0]=gsmg_code[adc_value/10]|0x80;
adc_buf[1]=gsmg_code[adc_value%10];
adc_buf[2]=0x3e;//显示单位V
smg_display(adc_buf,6);
}
}4.代码实践【AD转换】
1.将12bit位的数值分2次输出
//AD value是12bit的,分2波出去【因为一次只能输出8位】
void uart_send_advalue(u16 val){
uart_send_byte((val>>8)&0xff); //高8位
uart_send_byte(val&0xff); //低8位
uart_send_byte(0);//分割符
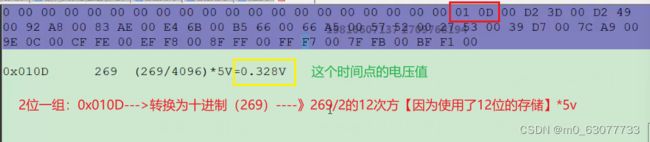
}2. 计算电压值
3.读取AD数值:
ET2046.c
#include"ET2046.h"
/*******************************************************************************
* 函 数 名 : xpt2046_read_adc_value
* 函数功能 : XPT2046读AD数据
* 输 入 : cmd:指令
* 输 出 : XPT2046返回AD值
*******************************************************************************/
u16 xpt2046_read_adc_value(u8 cmd)
{
u8 i;
u16 adc_value=0; //局部变量的初始化非常重要
CLK = 0;//先拉低时钟
CS = 0;//使能XPT2046
//写入数据
for(i=0;i<8;i++)//循环8次,每次传输一位,共一个字节
{
//先准备好数据,在置CLK=0
DIN = cmd >> 7;//先传高位再传低位
cmd <<= 1;//将低位移到高位
CLK = 0;//CLK由低到高产生一个上升沿,从而写入数据
_nop_();
CLK = 1;
_nop_();
}
for(i=6; i>0; i--);//延时等待转换结果,这个时候进行AD转换
CLK = 1;//发送应该
_nop_();
CLK = 0;//发送一个时钟,清除BUSY
_nop_();
for(i=0;i<12;i++)//循环12次,每次读取一位,大于一个字节数,所以返回值类型是u16
{
adc_value <<= 1;
CLK = 1;
_nop_();
CLK = 0; //CLK由高到低产生一个下降沿,从而读取数据
_nop_();
adc_value |= DOUT;//先读取高位,再读取低位。
}
CS = 1;//关闭ET2046
return adc_value;
}ET2046.h
#ifndef _xpt2046_H
#define _xpt2046_H
#include "reg51.h"
#include "intrins.h"
typedef unsigned int u16; //对系统默认数据类型进行重定义
typedef unsigned char u8;
typedef unsigned long u32;
//管脚定义
sbit DOUT = P1^3; //输出
sbit CLK = P1^0; //时钟
sbit DIN = P1^2; //输入
sbit CS = P1^1; //片选
//函数声明
u16 xpt2046_read_adc_value(u8 cmd);
#endifmain.c
#include"ET2046.h"
#include"uart.h"
#define CMD_READ_AIN0 0x94 //滑动变阻器
#define CMD_READ_AIN1 0xD4 //NTC--热敏电阻
#define CMD_READ_AIN2 0xA4 //GR1--光敏电阻
#define CMD_READ_AIN3 0xE4 //外部输入的电压值
void Delay400000us() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
_nop_();
i = 17;
j = 208;
k = 27;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
//AD value是12bit的,分2波出去【因为一次只能输出8位】
void uart_send_advalue(u16 val){
uart_send_byte((val>>8)&0xff); //高8位
uart_send_byte(val&0xff); //低8位
uart_send_byte(0);//分割符
}
void main(){
//注意:定义一个变量要记得初始化,要不然后面可能出现问题
u16 val=0;//12bit数值
uart_init();
while(1){
val=xpt2046_read_adc_value(CMD_READ_AIN0);
uart_send_advalue(val);
Delay400000us();
}
}4.串口直接显示电压值
1.关键点
(1)直接显示电压值,而不是采样AD值
(2)以文本方式显示,而不是十六进制方式
2.将数值转换为十进制
//以文本方式发送c过去,意思就是要串口助手用文本方式来查看,看到的是
//这个数字本身
void uart_send_text(unsigned char c){
//思路就是把c以十进制方式显示的几个数字,挨个变成文本发出去
unsigned char i;//因为c是unsigned char 范围是0-255
//先计算得出c的最高位,然后发出去
i=c/100;
uart_send_byte(i+48);//+48是对应ASCII
//计算次高位
c=c%100;
i=c/10;
uart_send_byte(i+48);
//计算个位
c=c%10;
i=c;
uart_send_byte(i+48);
//发送一个换行
uart_send_byte('\r');
uart_send_byte('\n');
}因为我们这里的电压是5V,对应5000mV,明显上面的0-255不在范围内,所以我们要求传入的是unsigned int c,【0-2的16次方】才足够
//因为这个函数的范围是unsigned char---->是2的8次方
//但是我们最大电压值为:5V----5000mV,所以我们这里要使用unsigned int
//以文本方式发送c过去,意思就是要串口助手用文本方式来查看,看到的是
//这个数字本身
void uart_send_text2(unsigned int c){
//思路就是把c以十进制方式显示的几个数字,挨个变成文本发出去
unsigned char i;//因为c是unsigned char 范围是0-255
//因为我们知道电压值不会超过5000mV,所以只考虑显示1万以内的数据
//先计算得出c的最高位,然后发出去
i=c/1000;
uart_send_byte(i+48);//+48是对应ASCII
c=c%1000;
i=c/100;
uart_send_byte(i+48);//+48是对应ASCII
//计算次高位
c=c%100;
i=c/10;
uart_send_byte(i+48);
//计算个位
c=c%10;
i=c;
uart_send_byte(i+48);
//发送一个换行
uart_send_byte('\r');
uart_send_byte('\n');
}
5.DA转换
将数字转换为模拟的
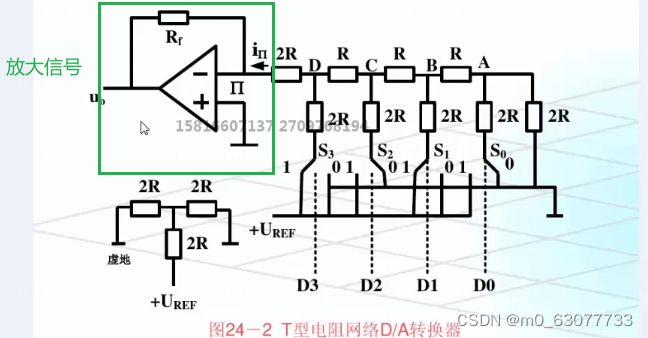
1.DA转换的原理
为了让数字量转换成模拟量,必须将每一位代码按其权重的大小转换为相应的模拟量,然后再把这些模拟量相加。
2.原理图和案例分析
1.运算放大器(LM358)
放大作用:将数字信号-----》模拟信号
隔离作用:防止输出信号影响输入信号

2.PWM数字信号
当输入的PWM数字信号一直为1,则输出的模拟信号一直为高电压
如果输入的PWM数字信号一直为0,则输出的模拟信号一直为低电压
关键点:取决于输入的PWM信号的高低电平所占的时间。【连续变化的模拟量】
3.LM358
其实不接LM358,直接用IO口连接LED实现现象也一样。(说明灯的亮度只与PWM输入的电压值的大小有关)
4.注意点
真正的DA一般是专用芯片或者CPU内置模块,给数字值输出平滑模拟量