GD32F103x 定时器
1. 定时器的基本介绍
STM32的定时器主要分为三种:高级定时器、通用定时器、基本定时器。

即:高级定时器具有捕获/比较通道和互补输出,死区时间,通用定时器只有捕获/比较通道,基本定时器没有以上两者。
1. 基本定时器

1.时钟源
时钟源来自RCC的CK_TIMER,就是内部时钟(CK_INT)直接经过控制器传给时基单元充当
PSC_CLK。
2.控制器
控制定时器的复位、使能、计数、DAC触发
3.基本时基单元
1>预分频器(PSC)perscaler
分频、得到计时器的时钟,即CNT计数1次所需要的时间,预分频器时16位的寄存器、所以可分频为1-65536。
基本定时器只能选择内部时钟,故预分频器直接输入端,即内部时钟CK_INT(一般为72MHz)
预分频器(PSC)写0(1分频或者不分频):则SK_CNT输出72MHz,
写1(2分频):输出36MHz,写2(3分频):输出24MHz。
故实际分频系数=预分配系数+1(分频器是16位,故最大位65525)。
2>计数器(CNT)counter
用来计数,到达设定值后,会产生中断。
3>自动重装寄存器(ARR)Auto Reload Register
CNT加到ARR的值之后,会产生一个事件或中断或DMA请求,中断用得比较多
UI(向上的箭头)中断响应,更新中断后会通向NVIC,再通向CPU
U(向下的箭头)事件响应:触发其他外设工作
4.主模式触发DAC功能
1)能让内部的硬件再不受程序的控制下实现自动运行,若利用好,可以极大地减轻CPU的负担。
2)用途:使我们使用DAC的时候,用DAC输出一段波形,则需要每隔一段事件触发一次DAC,让它输出下一个电压点。
用正常思维实现:先设置一个定时器产生中断,每隔一段时间再中断程序中调用代码手动触发一次DAC转换,然后DAC输出。这样会使主程序处于频繁被中断的状态,会影响主程序的运行和其他中断的响应
故定时器设置了一个主模式,使用主模式可以把定时器的更新事件映射到触发输出TRGO(Trigger Out)的位置,然后TRGO直接接到DAC的触发转换引脚上,这样定时器的更新就不需要用中断来触发DAC(数模转换)转换了
仅仅需要将更新事件通过主模式映射到TRGO,然后TRGO就会直接去触发DAC,整个过程不需要软件的参与,实现了硬件的自动化,这就是主模式的作用。
2. 通用定时器
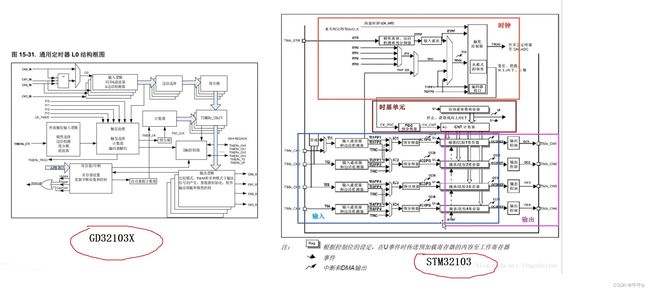
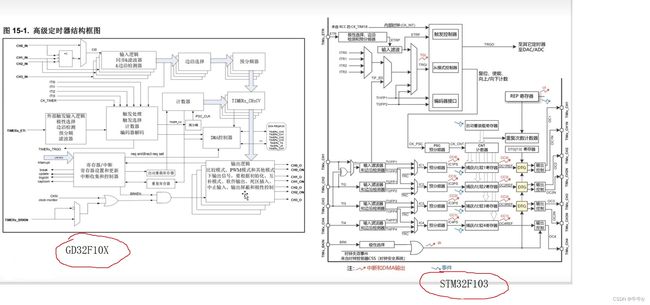
框图可以分为四个大部分,分别是:①时钟产生器部分,②时基单元部分,③输入捕获部分、④输出比较部分。
位于低速的APB1总线上(APB1)
16 位向上、向下、向上/向下(中心对齐)计数模式,自动装载计数器(TIMx_CNT)。
16 位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数 为 1~65535 之间的任意数值。
4 个独立通道(TIMx_CH1~4),这些通道可以用来作为:
① 输入捕获
② 输出比较
③ PWM 生成(边缘或中间对齐模式)
④ 单脉冲模式输出
可使用外部信号(TIMx_ETR)控制定时器和定时器互连(可以用 1 个定时器控制另外一个定时器)的同步电路。
如下事件发生时产生中断/DMA(6个独立的IRQ/DMA请求生成器):
①更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
②触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
③输入捕获
④输出比较
⑤支持针对定位的增量(正交)编码器和霍尔传感器电路
⑥触发输入作为外部时钟或者按周期的电流管理
STM32 的通用定时器可以被用于:测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和 PWM)等。
使用定时器预分频器和 RCC 时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。STM32 的每个通用定时器都是完全独立的,没有互相共享的任何资源。
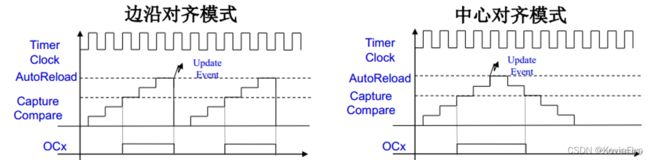
3. 计数器模式
通用定时器可以向上计数、向下计数、向上向下双向计数模式。
①向上计数模式:计数器从0计数到自动加载值(TIMx_ARR),然后重新从0开始计数并且产生一个计数器溢出事件。
②向下计数模式:计数器从自动装入的值(TIMx_ARR)开始向下计数到0,然后从自动装入的值重新开始,并产生一个计数器向下溢出事件。
③中央对齐模式(向上/向下计数):计数器从0开始计数到自动装入的值-1,产生一个计数器溢出事件,然后向下计数到1并且产生一个计数器溢出事件;然后再从0开始重新计数。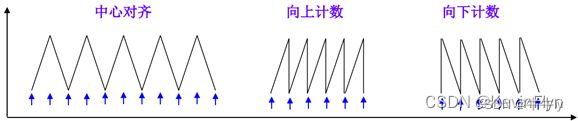
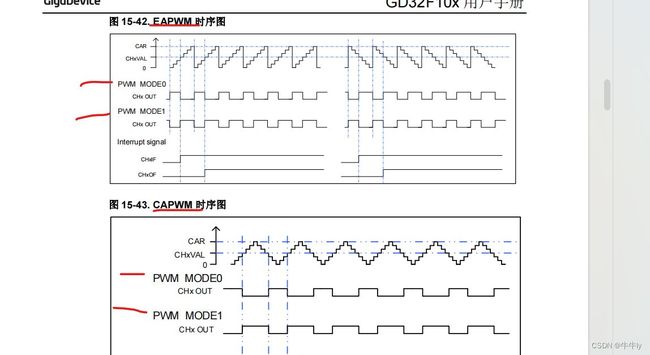
1. 输出PWM波
PWM模式运行产生:
定时器2、3和4可以产生4独立的信号
频率和占空比可以进行如下设定:
一个自动重载寄存器用于设定PWM的周期;
每个PWM通道有一个捕捉比较寄存器用于设定占空时间。
例如:产生一个40KHz的PWM信号:在定时器2的时钟为72MHz下,占空比为50% 。预分频寄存器设置为0 (计数器的时钟为TIM1CLK/(O+1)),自动重载寄存器设为 1799,CCRx寄存器设为899。
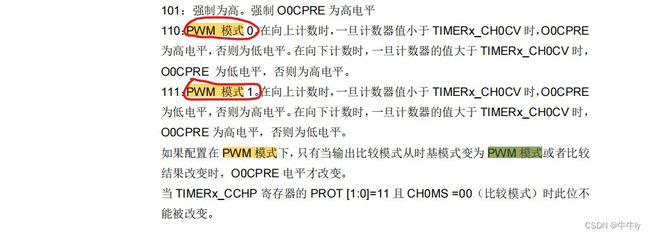
- 两种可设置PWM模式:
边沿对齐模式(PWM0或者PWM1)
3. 高级定时器
2.定时器应用

总结:定时器功能是很强大的。大多内容都是手册上 看的。我们需要定时器什么功能根据手册一步一步来配置。也这一看官方的dome快速上手。
3. 输出PWM不断修改占空比来实现呼吸灯。(通用定时器2)
PWM_pulse.h
#ifndef PWM_PULSE_H
#define PWM_PULSE_H
#include "gd32f10x.h"
void timer2_pwm_init(uint16_t psr, uint16_t arr); //初始化timer2的pwm输出参数
void timer2_pwm_duty_set(uint16_t duty); // 调整pwm的占空比
#endifPWM_pulse.c
#include "pwm_pulse.h"
//功能:初始化timer2的pwm输出参数
//psr: 预分频
//arr: 自动重装载
void timer2_pwm_init(uint16_t psr, uint16_t arr){
timer_parameter_struct timer_init_struct;
timer_oc_parameter_struct timer_oc_init_struct;
// 时钟源和io口pb0的初始化
rcu_periph_clock_enable(RCU_TIMER2); /* 开启定时器的时钟 */
rcu_periph_clock_enable(RCU_GPIOB); /* 开启GPIOB的时钟 */
rcu_periph_clock_enable(RCU_AF); /* 开启复用的时钟 */
gpio_init(GPIOB, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_0); /* GPIO初始化 */
// 初始化timer2
timer_deinit(TIMER2);
timer_init_struct.prescaler = psr;
timer_init_struct.period = arr; //自动装载值
timer_init_struct.alignedmode = TIMER_COUNTER_EDGE; //边沿对齐
timer_init_struct.counterdirection = TIMER_COUNTER_UP; //计数方向
timer_init(TIMER2, &timer_init_struct);
// PWM的初始化
timer_oc_init_struct.outputstate = TIMER_CCX_ENABLE; //使能通道
timer_channel_output_config(TIMER2, TIMER_CH_2, &timer_oc_init_struct);
timer_channel_output_mode_config(TIMER2,TIMER_CH_2, TIMER_OC_MODE_PWM0); /* PWM0模式 */
// 使能timer2
timer_enable(TIMER2);
}
// 功能:调整pwm的占空比
// duty: 捕获/比较
void timer2_pwm_duty_set(uint16_t duty){
timer_channel_output_pulse_value_config(TIMER2, TIMER_CH_2, duty); //设置 捕获/比较值
}main.c
对PB0上的LED现在呼吸灯。
硬件电路:


把PB0配置成定时器2复用功能。
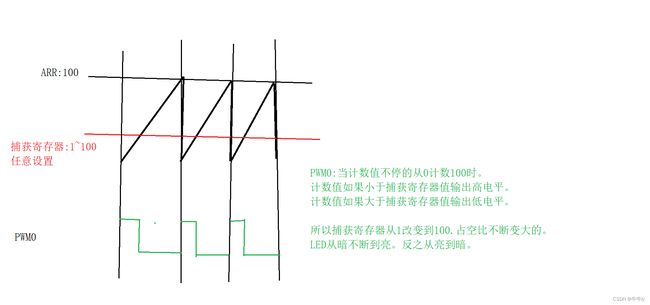
在代码中ARR:100 捕获寄存器:从1~ 100。(它决定占空比大小)。
简单画了一个图:在代码里选择的是PWM0模式。如果有示波器就会看到占空比不停变大,然后又不停的变小。不停循环。LED从暗到亮。然后又从亮到暗。不停循环。如果改成PWM1模式刚好反过来。具体可以自己试。