嵌入式Linux应用开发-基础知识-第十九章驱动程序基石③
嵌入式Linux应用开发-基础知识-第十九章驱动程序基石③
- 第十九章 驱动程序基石③
-
- 19.5 定时器
-
- 19.5.1 内核函数
- 19.5.2 定时器时间单位
- 19.5.3 使用定时器处理按键抖动
- 19.5.4 现场编程、上机
- 19.5.5 深入研究:定时器的内部机制
- 19.5.6 深入研究:找到系统滴答
- 19.6 中断下半部tasklet
-
- 19.6.1 内核函数
-
- 19.6.1.1 定义 tasklet
- 19.6.1.2 使能/禁止 tasklet
- 19.6.1.3 调度 tasklet
- 19.6.1.4
- 19.6.2
- 19.6.3
第十九章 驱动程序基石③

19.5 定时器
使用 GIT命令载后,本节源码位于这个目录下:
01_all_series_quickstart\
05_嵌入式 Linux驱动开发基础知识\source\
06_gpio_irq\
07_read_key_irq_poll_fasync_block_timer
19.5.1 内核函数
所谓定时器,就是闹钟,时间到后你就要做某些事。有 2个要素:时间、做事,换成程序员的话就是:超时时间、函数。
在内核中使用定时器很简单,涉及这些函数(参考内核源码 include\linux\timer.h):
① setup_timer(timer, fn, data):
设置定时器,主要是初始化 timer_list结构体,设置其中的函数、参数。
② void add_timer(struct timer_list *timer):
向内核添加定时器。timer->expires表示超时时间。
当超时时间到达,内核就会调用这个函数:timer->function(timer->data)。
③ int mod_timer(struct timer_list *timer, unsigned long expires):
修改定时器的超时时间,
它等同于:del_timer(timer); timer->expires = expires; add_timer(timer);
但是更加高效。
④ int del_timer(struct timer_list *timer):
删除定时器。
19.5.2 定时器时间单位
编译内核时,可以在内核源码根目录下用“ls -a”看到一个隐藏文件,它就是内核配置文件。打开后可以看到如下这项:
CONFIG_HZ=100
这表示内核每秒中会发生 100次系统滴答中断(tick),这就像人类的心跳一样,这是 Linux系统的心跳。每发生一次 tick中断,全局变量 jiffies就会累加 1。
CONFIG_HZ=100表示每个滴答是 10ms。
定时器的时间就是基于 jiffies的,我们修改超时时间时,一般使用这 2种方法:
① 在 add_timer之前,直接修改:
timer.expires = jiffies + xxx; // xxx表示多少个滴答后超时,也就是 xxx*10ms
timer.expires = jiffies + 2*HZ; // HZ等于 CONFIG_HZ,2*HZ就相当于 2秒
② 在 add_timer之后,使用 mod_timer修改:
mod_timer(&timer, jiffies + xxx); // xxx表示多少个滴答后超时,也就是 xxx*10ms
mod_timer(&timer, jiffies + 2*HZ); // HZ等于 CONFIG_HZ,2*HZ就相当于 2秒
19.5.3 使用定时器处理按键抖动
在实际的按键操作中,可能会有机械抖动:

按下或松开一个按键,它的 GPIO电平会反复变化,最后才稳定。一般是几十毫秒才会稳定。 如果不处理抖动的话,用户只操作一次按键,中断程序可能会上报多个数据。
怎么处理?
① 在按键中断程序中,可以循环判断几十亳秒,发现电平稳定之后再上报
② 使用定时器
显然第 1种方法太耗时,违背“中断要尽快处理”的原则,你的系统会很卡。
怎么使用定时器?看下图:
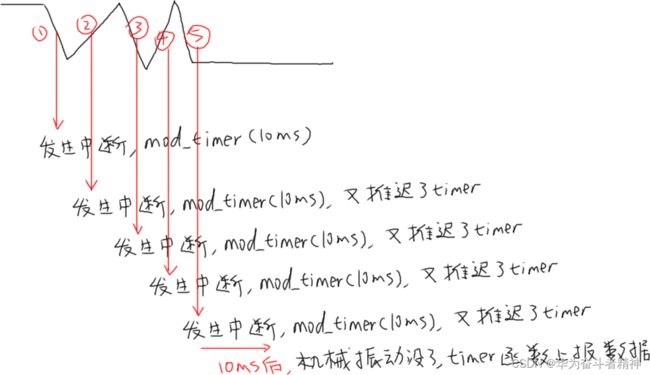
核心在于:在 GPIO中断中并不立刻记录按键值,而是修改定时器超时时间,10ms后再处理。 如果 10ms内又发生了 GPIO中断,那就认为是抖动,这时再次修改超时时间为 10ms。
只有 10ms之内再无 GPIO中断发生,那么定时器的函数才会被调用。
在定时器函数中记录按键值。
19.5.4 现场编程、上机
19.5.5 深入研究:定时器的内部机制
初学者会用定时器就行,本节不用看。
怎么实现定时器,逻辑上很简单:每发生一次硬件中断时,硬件中断处理完后就会看看有没有软件中断要处理。
定时器就是通过软件中断来实现的,它属于 TIMER_SOFTIRQ软中断。
对于 TIMER_SOFTIRQ软中断,初始化代码如下:
void __init init_timers(void)
{
init_timer_cpus();
init_timer_stats();
open_softirq(TIMER_SOFTIRQ, run_timer_softirq);
}
当发生硬件中断时,硬件中断处理完后,内核会调用软件中断的处理函数。对于 TIMER_SOFTIRQ,会调用 run_timer_softirq,它的函数如下:
run_timer_softirq
__run_timers(base);
while (time_after_eq(jiffies, base->clk)) {
……
expire_timers(base, heads + levels); fn = timer->function;
data = timer->data;
call_timer_fn(timer, fn, data); fn(data);
简单地说,add_timer函数会把 timer放入内核里某个链表;
在 TIMER_SOFTIRQ的处理函数中,会从链表中把这些超时的 timer取出来,执行其中的函数。 怎么判断是否超时?jiffies大于或等于 timer->expires时,timer就超时。
内核中有很多 timer,如果高效地找到超时的 timer?这是比较复杂的,
我们以后如果要深入讲解 timer的话,会用视频来讲解。
19.5.6 深入研究:找到系统滴答
这只是一些笔记,初学者不用看。
在开发板执行以下命令,可以看到 CPU0下有一个数值变化特别快,它就是滴答中断:
# cat /proc/interrupts
CPU0
16: 2532 GPC 55 Level i.MX Timer Tick
19: 22 GPC 33 Level 2010000.ecspi
20: 384 GPC 26 Level 2020000.serial
21: 0 GPC 98 Level sai
以 xxxxxx_IMX6ULL为做,滴答中断名字就是“i.MX Timer Tick”。
在 Linux内核源码目录下执行以下命令:
$ grep "i.MX Timer Tick" * -nr
drivers/clocksource/timer-imx-gpt.c:319: act->name = "i.MX Timer Tick";
打开 timer-imx-gpt.c 319行左右,可得如下源码:
act->name = "i.MX Timer Tick";
act->flags = IRQF_TIMER | IRQF_IRQPOLL;
act->handler = mxc_timer_interrupt;
act->dev_id = ced;
return setup_irq(imxtm->irq, act);
mxc_timer_interrupt应该就是滴答中断的处理函数,代码如下: static irqreturn_t mxc_timer_interrupt(int irq, void *dev_id) {
struct clock_event_device *ced = dev_id;
struct imx_timer *imxtm = to_imx_timer(ced);
uint32_t tstat;
tstat = readl_relaxed(imxtm->base + imxtm->gpt->reg_tstat); imxtm->gpt->gpt_irq_acknowledge(imxtm);
ced->event_handler(ced);
return IRQ_HANDLED;
}
在上述代码中没看到对 jiffies的累加操作啊,应该是在 ced->event_handler(ced)中进行。
ced->event_handler(ced)是哪一个函数?不太好找,我使用QEMU来调试内核,在mxc_timer_interrupt中打断点跟踪代码(以后的课程会讲怎么用 QEMU调试内核),发现它对应 tick_handle_periodic。
tick_handle_periodic位于 kernel\time\tick-common.c中,它里面的调用关系如下:
tick_handle_periodic
tick_periodic(cpu);
do_timer(1);
jiffies_64 += ticks; // jiffies就是 jiffies_64
你为何说 jiffies就是 jiffies_64?在 arch\arm\kernel\vmlinux.lds.S有如下代码:
#ifndef __ARMEB__
jiffies = jiffies_64;
#else
jiffies = jiffies_64 + 4;
#endif
上述代码说明了,对于大字节序的 CPU,jiffies指向 jiffies_64的高 4字节;对于小字节序的 CPU,jiffies指向 jiffies_64的低 4字节。
对 jiffies_64的累加操作,就是对 jiffies的累加操作。
19.6 中断下半部tasklet
使用 GIT命令载后,本节源码位于这个目录下:
01_all_series_quickstart\
05_嵌入式 Linux驱动开发基础知识\source\
06_gpio_irq\
08_read_key_irq_poll_fasync_block_timer_tasklet
在前面我们介绍过中断上半部、下半部。中断的处理有几个原则:
① 不能嵌套;
② 越快越好。
在处理当前中断时,即使发生了其他中断,其他中断也不会得到处理,所以中断的处理要越快越好。但是某些中断要做的事情稍微耗时,这时可以把中断拆分为上半部、下半部。
在上半部处理紧急的事情,在上半部的处理过程中,中断是被禁止的;
在下半部处理耗时的事情,在下半部的处理过程中,中断是使能的。
中断上半部、下半部的关系机制,请回顾第 18.2.5节。
19.6.1 内核函数
19.6.1.1 定义 tasklet
中断下半部使用结构体 tasklet_struct来表示,它在内核源码 include\linux\interrupt.h中定义: struct tasklet_struct
{
struct tasklet_struct *next;
unsigned long state;
atomic_t count;
void (*func)(unsigned long);
unsigned long data;
};
其中的 state有 2位:
① bit0表示 TASKLET_STATE_SCHED
等于 1时表示已经执行了 tasklet_schedule把该 tasklet放入队列了;tasklet_schedule会判断该位,如果已经等于 1那么它就不会再次把 tasklet放入队列。
② bit1表示 TASKLET_STATE_RUN
等于 1时,表示正在运行 tasklet中的 func函数;函数执行完后内核会把该位清 0。
其中的 count表示该 tasklet是否使能:等于 0表示使能了,非 0表示被禁止了。对于 count非 0的tasklet,里面的 func函数不会被执行。
使用中断下半部之前,要先实现一个 tasklet_struct结构体,这可以用这 2个宏来定义结构体:
#define DECLARE_TASKLET(name, func, data) \
struct tasklet_struct name = { NULL, 0, ATOMIC_INIT(0), func, data }
#define DECLARE_TASKLET_DISABLED(name, func, data) \
struct tasklet_struct name = { NULL, 0, ATOMIC_INIT(1), func, data }
使用 DECLARE_TASKLET定义的 tasklet结构体,它是使能的;
使用 DECLARE_TASKLET_DISABLED定义的 tasklet结构体,它是禁止的;使用之前要先调用tasklet_enable使能它。
也可以使用函数来初始化 tasklet结构体:
extern void tasklet_init(struct tasklet_struct *t,
void (*func)(unsigned long), unsigned long data);
19.6.1.2 使能/禁止 tasklet
static inline void tasklet_enable(struct tasklet_struct *t);
static inline void tasklet_disable(struct tasklet_struct *t);
tasklet_enable把 count增加 1;tasklet_disable把 count减 1。
19.6.1.3 调度 tasklet
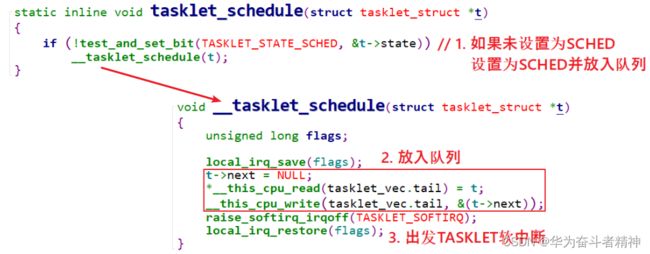
static inline void tasklet_schedule(struct tasklet_struct *t);
把 tasklet放入链表,并且设置它的 TASKLET_STATE_SCHED状态为 1。
19.6.1.4
kill tasklet
extern void tasklet_kill(struct tasklet_struct *t);
如果一个 tasklet未被调度,tasklet_kill会把它的 TASKLET_STATE_SCHED状态清 0;
如果一个 tasklet已被调度,tasklet_kill会等待它执行完华,再把它的 TASKLET_STATE_SCHED状态清 0。
通常在卸载驱动程序时调用 tasklet_kill。
19.6.2
tasklet使用方法
先定义 tasklet,需要使用时调用 tasklet_schedule,驱动卸载前调用 tasklet_kill。
tasklet_schedule只是把 tasklet放入内核队列,它的 func函数会在软件中断的执行过程中被调用。
19.6.3
tasklet内部机制
作为初学者,可以不看本节。
tasklet属于 TASKLET_SOFTIRQ软件中断,入口函数为 tasklet_action,这在内核 kernel\softirq.c中设置:

当驱动程序调用 tasklet_schedule时,会设置 tasklet的 state为 TASKLET_STATE_SCHED,并把它放入某个链表:
当发生硬件中断时,内核处理完硬件中断后,会处理软件中断。对于 TASKLET_SOFTIRQ软件中断,会调用 tasklet_action函数。
执行过程还是挺简单的:从队列中找到 tasklet,进行状态判断后执行 func函数,从队列中删除 tasklet。
从这里可以看出:
① tasklet_schedule调度 tasklet时,其中的函数并不会立刻执行,而只是把 tasklet放入队列;
② 调用一次 tasklet_schedule,只会导致 tasklnet的函数被执行一次;
③ 如果 tasklet的函数尚未执行,多次调用 tasklet_schedule也是无效的,只会放入队列一次。
tasklet_action函数解析如下:
