图论--图的存储及遍历
图的概念
简单讲,一个图是由一些点和这些点之间的连线组成的。严格意义讲,图是一种数据结构,定义为:graph=(V,E)。V 是一个非空有限集合,代表顶点,E 代表边的集合,一般用(Vx,Vy)表示,其中,Vx,Vy属于V。
无向图
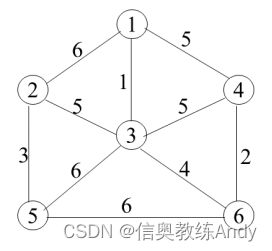
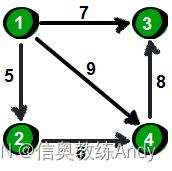
如果边是没有方向的,称为无向图,如右图。边用一对圆括号表示,如:(Vx,Vy),(Vy,Vx),当然这两者是等价的。并且说边(Vx,Vy)依附于(相关联)顶点Vx和Vy。
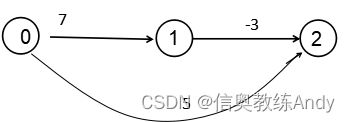
有向图
如果边是带箭头的,则称为有向图,如左图。边用一对尖括号表示,此时
图的存储方式
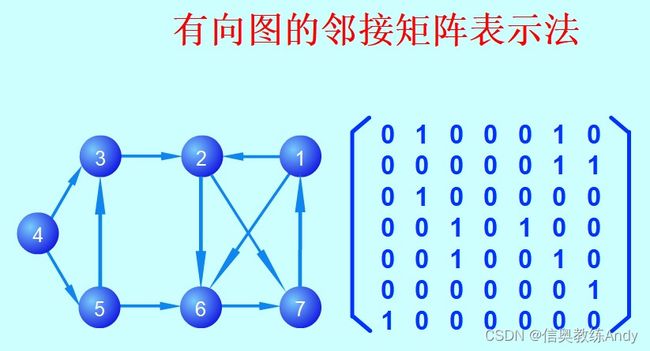
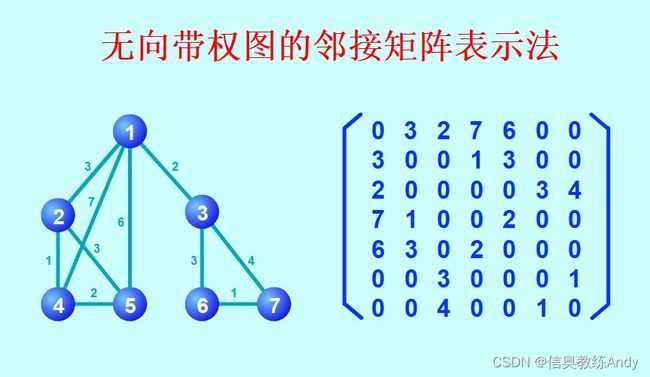
1、邻接矩阵
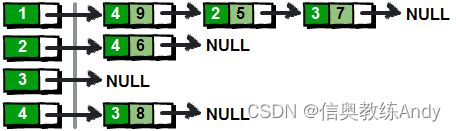
#include2、邻接表及遍历
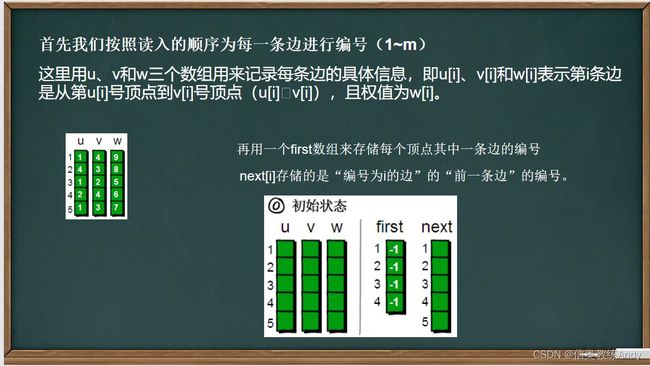
第一行两个整数n m。n表示顶点个数(顶点编号为1~n),m表示边的条数。 接下来m行表示,每行有3个数x y
z,表示顶点x到顶点y的边的权值为z。
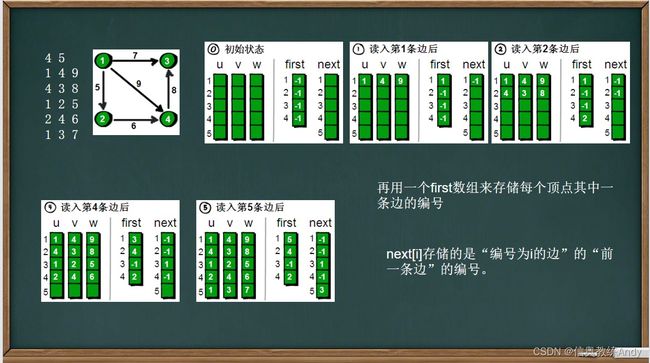
4 5
1 4 9
4 3 8
1 2 5
2 4 6
1 3 7
顶点集 边集
int n,m,i;
//u、v和w的数组大小要根据实际情况来设置,要比m的最大值要大1
int u[6],v[6],w[6];
//first和next的数组大小要根据实际情况来设置,要比n的最大值要大1
int first[5],next[6];
scanf("%d %d",&n,&m);
//初始化first数组下标1~n的值为-1,表示1~n顶点暂时都没有边
for(i=1;i<=n;i++)
first[i]=-1;
for(i=1;i<=m;i++)
{
scanf("%d %d %d",&u[i],&v[i],&w[i]);//读入每一条边
//下面两句是关键啦
next[i]=first[u[i]];
first[u[i]]=i;
}
遍历1号顶点所有边的代码如下
k=first[1];// 1号顶点其中的一条边的编号(其实也是最后读入的边)
while(k!=-1) //其余的边都可以在next数组中依次找到
{
printf("%d %d %d\n",u[k],v[k],w[k]);
k=next[k];
}
遍历每个顶点的所有边的代码如下
for(i=1;i<=n;i++)
{
k=first[i];
while(k!=-1)
{
printf("%d %d %d\n",u[k],v[k],w[k]);
k=next[k];
}
}
完整代码
#include
}
cout<<endl;
}
return 0;
}
vector模拟邻接表
/*G就是整个图的邻接表。
遍历某个点的边表,举个例子
G[x]是一个数组,里面存的就是G[x]所有的点的序号,后插的顺序。
遍历这个点相邻的边时候,直接for(int i=0;i
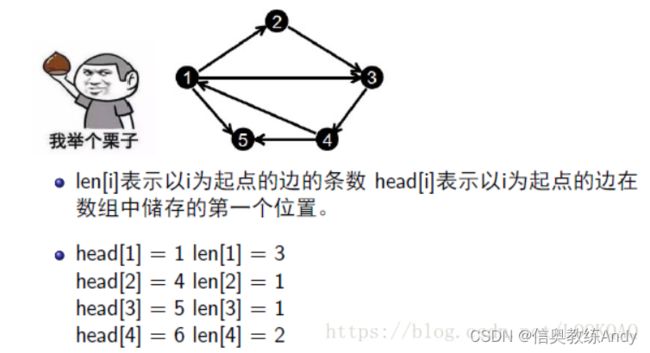
#include 3、向前星
前向星是一种特殊的边集数组,我们把边集数组中的每一条边按照起点从小到大排序,如果起点相同就按照终点从小到大排序,并记录下以某个点为起点的所有边在数组中的起始位置和存储长度,那么前向星就构造好了.
它的优点是实现简单,容易理解,缺点是需要在所有边都读入完毕的情况下对所有边进行一次排序,带来了时间开销,实用性也较差,只适合离线算法。
【前向星和链式前向星的不同】:
链式前向星(就是数组模拟链表)
链式前向星和邻接表类似,也是链式结构和线性结构的结合,每个结点i都有一个链表,链表的所有数据是从i出发的所有边的集合(对比邻接表存的是顶点集合),边的表示为一个四元组(u, v, w, next),其中(u, v)代表该条边的有向顶点对,w代表边上的权值,next指向下一条边。

【给出链式前向星的代码实现】:
#include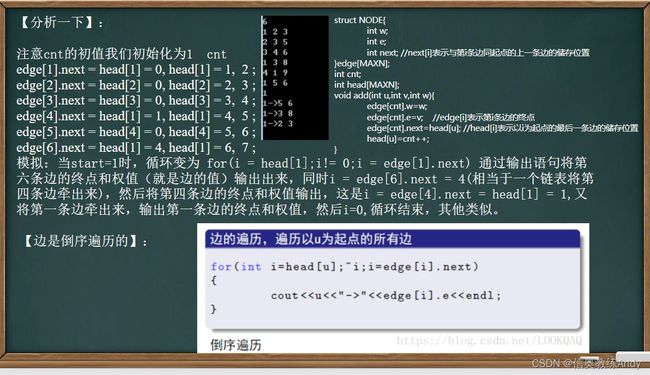
图的遍历
图的遍历跟图的存储方式有很大的相关性。如果使用邻接表进行图的存储,那么遍历方式就如上面展示那样。而使用邻接矩阵存储的图的遍历方式,一般有深度优先遍历和广度优先遍历两种。
例题1:查找文献
例题2:图的遍历
练习题目
1、信息传递
2、幻象迷宫