【多模态融合】TransFusion学习笔记(2)
接上篇【多模态融合】TransFusion学习笔记(1)。
从TransFusion-L到TransFusion
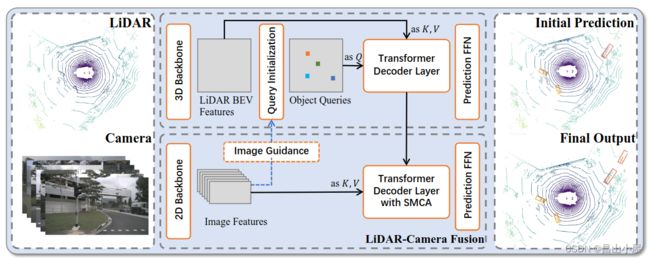
ok,终于可以给出论文中那个完整的框架图了,我第一眼看到这个图有几个疑问:
Q:Image Guidance这条虚线引出的Query Initialization是什么意思?
Q:图像分支中的Image Features as K,V是将整张图像的特征图都作为K,V么?
Q:有了第2阶段之后Initial Prediction还需要么?
Q:如果第一阶段的Q来自纯lidar bev feature map,用它来聚合Image Features靠普么,毕竟是两种模态的特征?
Q:第2阶段的Transformer Decoder Layer with SMCA,这个SMCA是什么意思?
Q:如果仅仅是纯Lidar分支产生的object query去聚合image featuers产生最终的预测肯定是不够的,你可能得到一个修正之后更准的边界框或者分类,但是lidar漏掉的框是没办法恢复的,所以应该还有补漏的环节?
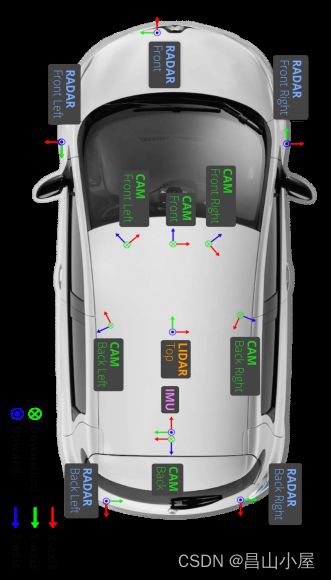
带着诸的疑问结合论文及代码继续分析,仍然假定batch为2,数据集为nuScenes。说到nuScenes需要大该了解以下他lidar和camera配置。他在车顶端配备了一个32线Lidar,然后按321队形配置了6个Camera。所以,代码中推理的时候每一个batch同时包含了6张图像。
#源文件mmdet3d/models/dense_heads/transfusion_head.py
def forward(self, feats, img_feats, img_metas):
"""Forward pass.
Args:
feats (list[torch.Tensor]): Multi-level features, e.g.,
features produced by FPN.
Returns:
tuple(list[dict]): Output results. first index by level, second index by layer
"""
if img_feats is None:
img_feats = [None]
res = multi_apply(self.forward_single, feats, img_feats, [img_metas])
assert len(res) == 1, "only support one level features."
return res现在再来看tranfusion检测头推理入口forward函数的时候,img_feats和img_metas就包含了满满的图像及其特征信息了,其中img_feats的shape为(12,256,112,200),12为batch(2)*6(cameras的数量),它将batch和n_views整合在了一起,明白这一点很重要。
def forward_single(self, inputs, img_inputs, img_metas):
"""Forward function for CenterPoint.
Args:
inputs (torch.Tensor): Input feature map with the shape of
[B, 512, 128(H), 128(W)]. (consistent with L748)
Returns:
list[dict]: Output results for tasks.
"""
batch_size = inputs.shape[0]
lidar_feat = self.shared_conv(inputs) ##=>[2, 128, 128, 128]
lidar_feat_flatten = lidar_feat.view(batch_size, lidar_feat.shape[1], -1) #=>[BS, C, H*W]
bev_pos = self.bev_pos.repeat(batch_size, 1, 1).to(lidar_feat.device)
if self.fuse_img:
img_feat = self.shared_conv_img(img_inputs) # [BS * n_views, C, H, W]
img_h, img_w, num_channel = img_inputs.shape[-2], img_inputs.shape[-1], img_feat.shape[1]
# =>[B, C, H, n_views, W]
raw_img_feat = img_feat.view(batch_size, self.num_views, num_channel, img_h, img_w).permute(0, 2, 3, 1, 4)
# =>[B, C, H, n_views*W]
img_feat = raw_img_feat.reshape(batch_size, num_channel, img_h, img_w * self.num_views)
# =>(B,C,n_view*W)
img_feat_collapsed = img_feat.max(2).values
# positional encoding for image guided query initialization
if self.img_feat_collapsed_pos is None:
img_feat_collapsed_pos = self.img_feat_collapsed_pos
= self.create_2D_grid(1, img_feat_collapsed.shape[-1]).to(img_feat.device)
else:
img_feat_collapsed_pos = self.img_feat_collapsed_pos
bev_feat = lidar_feat_flatten
for idx_view in range(self.num_views):
bev_feat = self.decoder[2 + idx_view](bev_feat, img_feat_collapsed[..., img_w * idx_view:img_w * (idx_view + 1)],
bev_pos, img_feat_collapsed_pos[:, img_w * idx_view:img_w * (idx_view + 1)])
这段代码用于生成LiDAR-camera BEV feature map Flc。
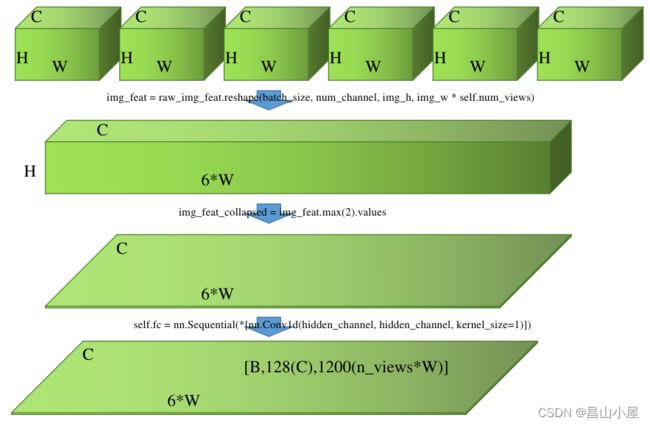

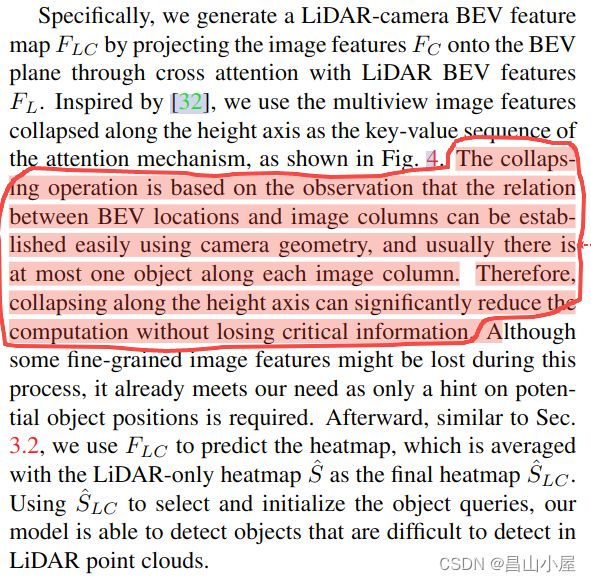
使用Lidar BEV features作为Q,使用高度压缩后的Image Features作为K,V。为什么要对Image Features进行高度压缩,作者在论文中也做了解释。
如何融合lidar bev features和image features拿到一个更具表达能力的bev feature map,在若干其它论文中都有涉及。引用较多的比如:BEVFusion。
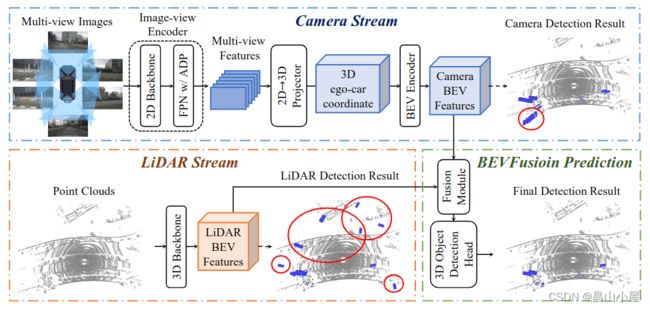
BEVFusion这种特征融合的方式很直观,但是他需要将不同视角(Multi-view)下的图像特征通过LSS或其它方式编码到BEV空间,然后使用一个Dynamic Fusion Module得到融合后的特征。

考虑一个问题,如果使用BEVFusion这种多模态融合的bev feature map替换TransFusion-L中纯Lidar产生的bev featuremap会有什么效果呢?bevfusion的作者就做了这个实验。
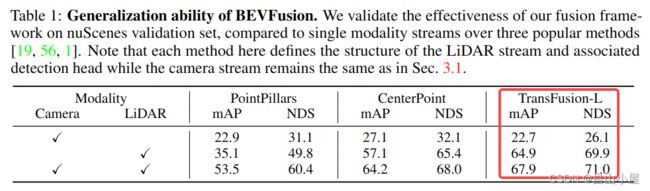
从最后一列的nuScenes Validation上的结果来看mAP和NDS分别提了3.%和1.1%。怎么说呢,有用,但好像又觉得没赚到啥。费这么大力气把不同视角下的image特征提取出来再编码到BEV空间,融合完成后结果mAP相比纯Lidar涨了3个点,基本上就是Lidar在支撑着。
#################################
# image guided query initialization
#################################
if self.initialize_by_heatmap:
##=>[2, 10, 128, 128])
dense_heatmap = self.heatmap_head(lidar_feat)
dense_heatmap_img = None
if self.fuse_img:
dense_heatmap_img = self.heatmap_head_img(bev_feat.view(lidar_feat.shape)) # [BS, num_classes, H, W]
heatmap = (dense_heatmap.detach().sigmoid() + dense_heatmap_img.detach().sigmoid()) / 2
else:
heatmap = dense_heatmap.detach().sigmoid()
padding = self.nms_kernel_size // 2
local_max = torch.zeros_like(heatmap)
local_max_inner = F.max_pool2d(heatmap, kernel_size=self.nms_kernel_size, stride=1, padding=0)
local_max[:, :, padding:(-padding), padding:(-padding)] = local_max_inner
## for Pedestrian & Traffic_cone in nuScenes
if self.test_cfg['dataset'] == 'nuScenes':
local_max[:, 8, ] = F.max_pool2d(heatmap[:, 8], kernel_size=1, stride=1, padding=0)
local_max[:, 9, ] = F.max_pool2d(heatmap[:, 9], kernel_size=1, stride=1, padding=0)
elif self.test_cfg['dataset'] == 'Waymo': # for Pedestrian & Cyclist in Waymo
local_max[:, 1, ] = F.max_pool2d(heatmap[:, 1], kernel_size=1, stride=1, padding=0)
local_max[:, 2, ] = F.max_pool2d(heatmap[:, 2], kernel_size=1, stride=1, padding=0)
##非max-heat的地方就被set为0了
heatmap = heatmap * (heatmap == local_max)
##torch.Size([2, 10, 16384]) <==
heatmap = heatmap.view(batch_size, heatmap.shape[1], -1)
# top #num_proposals among all classes
top_proposals = heatmap.view(batch_size, -1).argsort(dim=-1, descending=True)[..., :self.num_proposals]
top_proposals_class = top_proposals // heatmap.shape[-1]
##index有什么用??
top_proposals_index = top_proposals % heatmap.shape[-1]
query_feat = lidar_feat_flatten.gather(index=top_proposals_index[:, None, :].expand(-1, lidar_feat_flatten.shape[1], -1), dim=-1)
self.query_labels = top_proposals_class
one_hot = F.one_hot(top_proposals_class, num_classes=self.num_classes).permute(0, 2, 1)
query_cat_encoding = self.class_encoding(one_hot.float())
query_feat += query_cat_encoding
query_pos = bev_pos.gather(index=top_proposals_index[:, None, :].permute(0, 2, 1).expand(-1, -1, bev_pos.shape[-1]), dim=1)
else:
query_feat = self.query_feat.repeat(batch_size, 1, 1) # [BS, C, num_proposals]
base_xyz = self.query_pos.repeat(batch_size, 1, 1).to(lidar_feat.device) # [BS, num_proposals, 2]在没有融合Image Features之前,heatmap需要从纯lidar feature map出。现在有了融合后的bev_feat,自然heatmap又多了一条出路。这就是代码中既有一个dense_heatmap,又多出来了一个dense_heatmap_img,最终通过以下代码进行了融合。
heatmap = (dense_heatmap.detach().sigmoid() + dense_heatmap_img.detach().sigmoid()) / 2不看代码我还以为就只是利用了从dense_heatmap_img出的heatmap,作者这里还是做了一下结合,结合方式也比较简单,各自simgoid之后相加取平均。
ret_dicts = []
for i in range(self.num_decoder_layers):
prefix = 'last_' if (i == self.num_decoder_layers - 1) else f'{i}head_'
# Transformer Decoder Layer
# :param query: B C Pq :param query_pos: B Pq 3/6
query_feat = self.decoder[i](query_feat, lidar_feat_flatten, query_pos, bev_pos)
# Prediction
res_layer = self.prediction_heads[i](query_feat) ##FFN
res_layer['center'] = res_layer['center'] + query_pos.permute(0, 2, 1)
first_res_layer = res_layer
if not self.fuse_img:
ret_dicts.append(res_layer)
# for next level positional embedding
query_pos = res_layer['center'].detach().clone().permute(0, 2, 1)这段代码和单模态的TransFusion-L比,query_feat还是从纯lidar bev featuremap取的,lidar_feat_flatten也还是原来那个展开了的lidar bev featuremap。但是,此时的query_feat所在的热点位置因为是从融合bev featuremap出的,所以就有了"Image Guidance"的说法。
#################################
# transformer decoder layer (img feature as K,V)
#################################
if self.fuse_img:
# positional encoding for image fusion
img_feat = raw_img_feat.permute(0, 3, 1, 2, 4) # [BS, n_views, C, H, W]
img_feat_flatten = img_feat.view(batch_size, self.num_views, num_channel, -1) # [BS, n_views, C, H*W]
if self.img_feat_pos is None:
(h, w) = img_inputs.shape[-2], img_inputs.shape[-1]
img_feat_pos = self.img_feat_pos = self.create_2D_grid(h, w).to(img_feat_flatten.device)
else:
img_feat_pos = self.img_feat_pos
prev_query_feat = query_feat.detach().clone()
query_feat = torch.zeros_like(query_feat) # create new container for img query feature
query_pos_realmetric = query_pos.permute(0, 2, 1) * self.test_cfg['out_size_factor'] * self.test_cfg['voxel_size'][0] + self.test_cfg['pc_range'][0]
query_pos_3d = torch.cat([query_pos_realmetric, res_layer['height']], dim=1).detach().clone()
if 'vel' in res_layer:
vel = copy.deepcopy(res_layer['vel'].detach())
else:
vel = None
pred_boxes = self.bbox_coder.decode(
copy.deepcopy(res_layer['heatmap'].detach()),
copy.deepcopy(res_layer['rot'].detach()),
copy.deepcopy(res_layer['dim'].detach()),
copy.deepcopy(res_layer['center'].detach()),
copy.deepcopy(res_layer['height'].detach()),
vel,
)
on_the_image_mask = torch.ones([batch_size, self.num_proposals]).to(query_pos_3d.device) * -1
for sample_idx in range(batch_size if self.fuse_img else 0):
lidar2img_rt = query_pos_3d.new_tensor(img_metas[sample_idx]['lidar2img'])
img_scale_factor = (
query_pos_3d.new_tensor(img_metas[sample_idx]['scale_factor'][:2]
if 'scale_factor' in img_metas[sample_idx].keys() else [1.0, 1.0]))
img_flip = img_metas[sample_idx]['flip'] if 'flip' in img_metas[sample_idx].keys() else False
img_crop_offset = (
query_pos_3d.new_tensor(img_metas[sample_idx]['img_crop_offset'])
if 'img_crop_offset' in img_metas[sample_idx].keys() else 0)
img_shape = img_metas[sample_idx]['img_shape'][:2]
img_pad_shape = img_metas[sample_idx]['input_shape'][:2]
boxes = LiDARInstance3DBoxes(pred_boxes[sample_idx]['bboxes'][:, :7], box_dim=7)
query_pos_3d_with_corners = torch.cat([query_pos_3d[sample_idx], boxes.corners.permute(2, 0, 1).view(3, -1)], dim=-1) # [3, num_proposals] + [3, num_proposals*8]
# transform point clouds back to original coordinate system by reverting the data augmentation
if batch_size == 1: # skip during inference to save time
points = query_pos_3d_with_corners.T
else:
points = apply_3d_transformation(query_pos_3d_with_corners.T, 'LIDAR', img_metas[sample_idx], reverse=True).detach()
num_points = points.shape[0]
for view_idx in range(self.num_views):
pts_4d = torch.cat([points, points.new_ones(size=(num_points, 1))], dim=-1)
pts_2d = pts_4d @ lidar2img_rt[view_idx].t()
##相机内参前面那个1/z
pts_2d[:, 2] = torch.clamp(pts_2d[:, 2], min=1e-5)
pts_2d[:, 0] /= pts_2d[:, 2]
pts_2d[:, 1] /= pts_2d[:, 2]
# img transformation: scale -> crop -> flip
# the image is resized by img_scale_factor
img_coors = pts_2d[:, 0:2] * img_scale_factor # Nx2
img_coors -= img_crop_offset
# grid sample, the valid grid range should be in [-1,1]
coor_x, coor_y = torch.split(img_coors, 1, dim=1) # each is Nx1
if img_flip:
# by default we take it as horizontal flip
# use img_shape before padding for flip
orig_h, orig_w = img_shape
coor_x = orig_w - coor_x
##e.g. 200个proposal总共有200 + 200*8 = 1800个坐标点
coor_x, coor_corner_x = coor_x[0:self.num_proposals, :], coor_x[self.num_proposals:, :]
coor_y, coor_corner_y = coor_y[0:self.num_proposals, :], coor_y[self.num_proposals:, :]
coor_corner_x = coor_corner_x.reshape(self.num_proposals, 8, 1)
coor_corner_y = coor_corner_y.reshape(self.num_proposals, 8, 1)
coor_corner_xy = torch.cat([coor_corner_x, coor_corner_y], dim=-1)
h, w = img_pad_shape
on_the_image = (coor_x > 0) * (coor_x < w) * (coor_y > 0) * (coor_y < h)
on_the_image = on_the_image.squeeze()
# skip the following computation if no object query fall on current image
if on_the_image.sum() <= 1:
continue
on_the_image_mask[sample_idx, on_the_image] = view_idx
# add spatial constraint
#out_size_factor_img是什么out的factor?
center_ys = (coor_y[on_the_image] / self.out_size_factor_img)
center_xs = (coor_x[on_the_image] / self.out_size_factor_img)
centers = torch.cat([center_xs, center_ys], dim=-1).int() # center on the feature map
corners = (coor_corner_xy[on_the_image].max(1).values - coor_corner_xy[on_the_image].min(1).values) / self.out_size_factor_img
#gaosi ge
radius = torch.ceil(corners.norm(dim=-1, p=2) / 2).int() # radius of the minimum circumscribed circle of the wireframe
sigma = (radius * 2 + 1) / 6.0
"""
The 2D gaussian weight mask M is generated in a similar way as Center-Net,
Mij = exp(((i-cx)^2+(j-cy)^2)/(sigma*radius^2)),where (i,j) is the spatial indices of the weight mask M,
(cx,cy) is the 2D center computed by projecting the query prediction onto the image plane
"""
distance = (centers[:, None, :] - (img_feat_pos - 0.5)).norm(dim=-1) ** 2
gaussian_mask = (-distance / (2 * sigma[:, None] ** 2)).exp()
gaussian_mask[gaussian_mask < torch.finfo(torch.float32).eps] = 0 ##太远的地方权重太小,直接给0
attn_mask = gaussian_mask
query_feat_view = prev_query_feat[sample_idx, :, on_the_image]
query_pos_view = torch.cat([center_xs, center_ys], dim=-1)
query_feat_view = self.decoder[self.num_decoder_layers](query_feat_view[None],
img_feat_flatten[sample_idx:sample_idx + 1, view_idx],
query_pos_view[None], img_feat_pos, attn_mask=attn_mask.log())
query_feat[sample_idx, :, on_the_image] = query_feat_view.clone()
self.on_the_image_mask = (on_the_image_mask != -1)
res_layer = self.prediction_heads[self.num_decoder_layers](torch.cat([query_feat, prev_query_feat], dim=1))
res_layer['center'] = res_layer['center'] + query_pos.permute(0, 2, 1)
for key, value in res_layer.items():
pred_dim = value.shape[1]
res_layer[key][~self.on_the_image_mask.unsqueeze(1).repeat(1, pred_dim, 1)] = first_res_layer[key][~self.on_the_image_mask.unsqueeze(1).repeat(1, pred_dim, 1)]
ret_dicts.append(res_layer)ok,正式进入TransFusion第2阶段,只是现在的为K,V来自Image features。关于怎么利用第一阶段的predict boxes以及Gaussian Circule作者在论文中已经写的很清楚了。应该算是诸多论文中的常规操作。
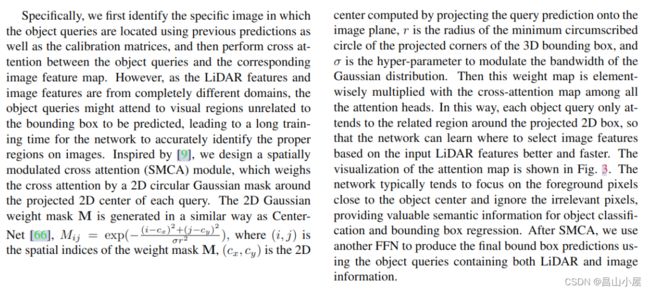
看到这里其实大该明白了作者所说的"soft-association",虽然由predict boxes到image features借助了标定关系。但是通过object query聚合对应局部image featues这里利用了TransFormer,尤其是利用其中的cross attention做了跟当前object query上下文相关的特征聚合,即使传感器之间没有严格对齐也更加鲁棒。