蓝桥杯全芯片介绍及使用(带驱动源码)
蓝桥杯全芯片介绍及使用
本文于
2023年3月24日所写,并根据第十四届蓝桥杯大赛电子类选手资源数据包所写,使用原理图为SCH_硬件原理图V30.pdf,请注意版本时间与使用原理图。
目录
- 蓝桥杯全芯片介绍及使用
-
- 一、74HC_HCT02
-
- 1、基本介绍
- 2、芯片接入接出
- 3、单片机控制
- 二、74HC_HCT04
-
- 1、基本介绍
- 2、芯片接入接出
- 3、单片机控制
- 三、74HC_HCT573
-
- 1、基本介绍
- 2、芯片接入接出
- 3、单片机控制
- 四、74HC138
-
- 1、基本介绍
- 2、芯片接入接出
- 3、单片机控制
- 五、AT24C02
-
- 1、基本介绍
- 2、引脚接入接出
- 3、单片机控制
- 六、CH340DS1
- 七、DS18B20
-
- 1、基本介绍
- 2、引脚接入接出
- 3、单片机控制
- 八、DS1302
-
- 1、基本介绍
- 2、引脚接入接出
- 3、单片机控制
- 九、LM324
- 十、LM386
- 十一、LM555
- 十二、PCF8591
-
- 1、基本介绍
- 2、引脚接入接出
- 3、单片机控制
- 十三、ULN2003
-
- 1、基本介绍
- 2、引脚接入接出
- 3、单片机控制
- 十四、USBCH341
一、74HC_HCT02
1、基本介绍
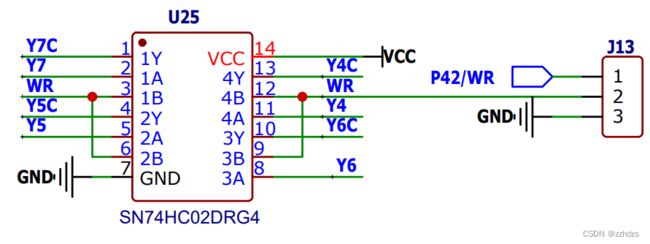
或非门,于原理图中为SN74HC02DRG4(U25)。
在WR(P42) = 0或接GND时,直接作为非门使用,因片选芯片**74HC138(U24)**选择的端口为低,未选择为高,通过此芯片后取反可以更容易理解其使用。

2、芯片接入接出
- 接入
- Y4、Y5、Y6、Y7由片选芯片**74HC138(U24)**接出。
- WR接51单片机
P24或GND(通过J13选择)。
- 接出
- Y4C接入8位LED锁存芯片74HC573(U6)。
- Y5C接入ULN2003(U10) 前锁存芯片 74HC573(U9)。
- Y6C接入数码管位选锁存芯片74HC573(U8)。
- Y7C接入数码管段选锁存芯片74HC573(U7)。
3、单片机控制
当J13接(P42)时,WR(P42) = 1时所有输出端口为低,可用于功能锁定,应用较少,暂不介绍。因其具体功能与**74HC138(U24)**直接相关,相关控制可直接观看后文。
二、74HC_HCT04
1、基本介绍
非门,此芯片用于超声发射装置,在J2选择1-3、2-4有效。由P10控制,其主要目的为控制超声波模块实现发声。

2、芯片接入接出
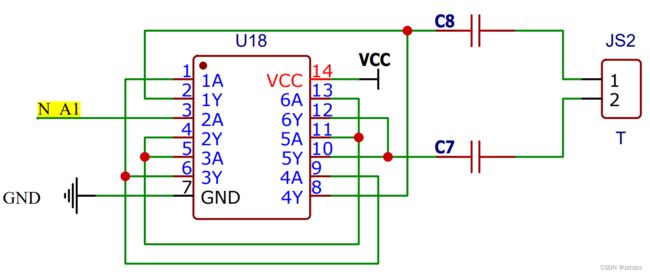
- 接入
芯片2A端口由P10实现控制。 - 接出
接出于超声波发生装置JS2。
3、单片机控制
单片机控制超声波模块发声(此代码由官方提供)。
#include "STC15F2K60S2.H"
#define TX P10 // 发射引脚
#define RX P11 // 接收引脚
void Timer0Init(void) // 12us@12MHz
{
AUXR &= 0x7F; // 定时器时钟12T模式
TMOD &= 0xF0; // 设置定时器模式
TL0 = 0xF4; // 设置定时初值
TH0 = 0xFF; // 设置定时初值
TF0 = 0; // 清除TF0标志
TR0 = 0; // 定时器0停止
}
unsigned char Wave_Recv(void)
{
unsigned char ucDist, ucNum = 10;
TX = 0;
TL0 = 0xF4; // 设置定时初值
TH0 = 0xFF; // 设置定时初值
TR0 = 1; // 定时器0计时
// TX引脚发送40KHz方波信号驱动超声波发送探头
while(ucNum--)
{
while(!TF0);
TX ^= 1;
TF0 = 0;
}
TR0 = 0;
TL0 = 0; // 设置定时初值
TH0 = 0; // 设置定时初值
TR0 = 1;
while(RX && !TF0); // 等待收到脉冲
TR0 = 0;
if(TF0) // 发生溢出
{
TF0 = 0;
ucDist = 255;
}
else // 计算距离
ucDist = ((TH0<<8)+TL0)*0.017;
return ucDist;
}
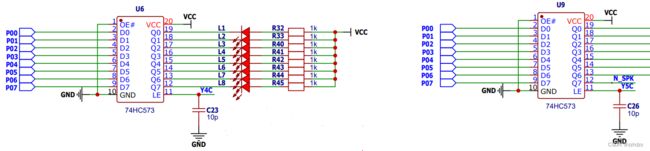
三、74HC_HCT573
1、基本介绍
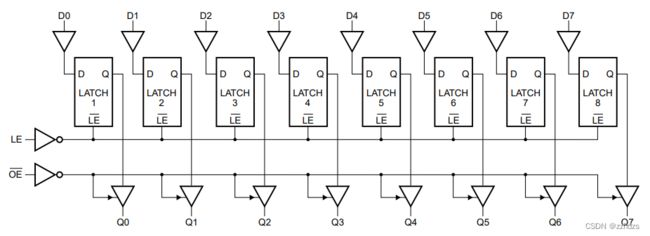
锁存器,于原理图中名称为74HC573,原理图中有多个此芯片,具体情况如下
- U6:LED控制相关锁存芯片。
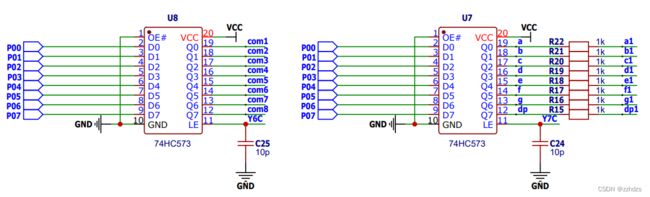
- U7:数码管段选相关锁存芯片。
- U8:数码管位选相关锁存芯片。
- U9:ULN2003(U10) 功能开关相关锁存芯片。
当锁存器LE引脚为低电平时,输入端D0~D7输入数据无效,输出端Q0~Q7保持原状态;当锁存器LE引脚为高电平时,输入端D0~D7输入数据无效,输出端Q0~Q7与输入端保持一致。
2、芯片接入接出
- 芯片接入
芯片相关输入端口都接入单片机P0端口,LE引脚接入 SN74HC02DRG4(U25) 相关端口,具体接线于一、74HC_HCT02 > 2、芯片接入接出 > 接出中对比查看。 - 芯片接出
- U6:LED控制相关锁存芯片。
接LED1~LED8,当输出端口为低电平时,LED灯亮,反之灯灭。 - U7:数码管段选相关锁存芯片。
接数码管a~g、dp端口,通过控制与位选不同电平控制数码管显示内容。 - U8:数码管位选相关锁存芯片。
接数码管com1~com8,用于控制数码管显示位。 - U9:ULN2003(U10) 功能开关相关锁存芯片。
接ULN2003(U10),可用于控制 ULN2003(U10) 下多种功能开关。
- U6:LED控制相关锁存芯片。
3、单片机控制
通过控制P0端口可控制相关锁存器的输入端口数据,相关控制选择[Control()函数]请看后文。
- 数码管控制
#include - LED控制
#include - 其他控制
#include 四、74HC138
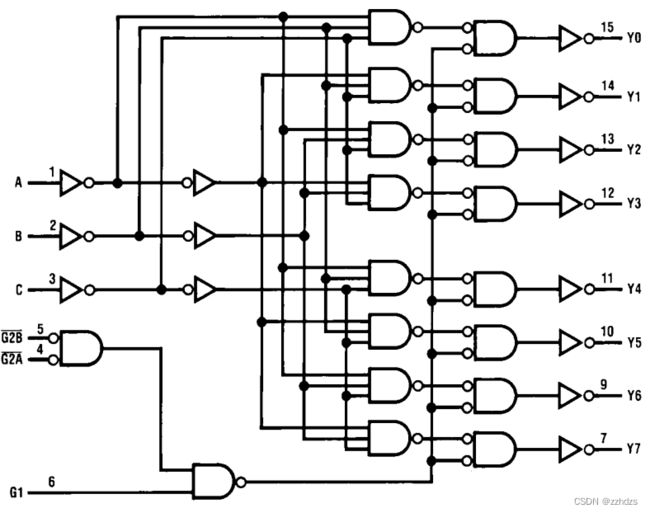
1、基本介绍
三八译码器,在原理图中名为74HC138(U24),通过本芯片可以选择开发板中的诸多外设,功能也比较简单,通过P25~P27可以选择74HC138(U24)相应端口Y0~Y7中一个,及将P25~P27所组成的8进制数转化为具体的端口数,但需要注意的是被选的端口为低电平,未选端口为高电平。
2、芯片接入接出

- 接入
单片机P25~P27引脚接74HC138(U24) 中 A0~A3,需要注意,在转换中,P27为高位。 - 接出
引脚Y4~Y7接入SN74HC02DRG4(U25),具体可对比一、74HC_HCT02 > 2、芯片接入接出 > 接入。
Y0~Y3未使用。
3、单片机控制
单片机可以同控制P25~P27实现相关控制功能。
- 方法一
#include - 方法二
#include 五、AT24C02
1、基本介绍
Eeprom,在原理图中命名为AT24C02(U4),可存储2KB数据的带电可擦可编程只读存储器。通过IIC控制。IIC中SCL端口接P20,SDA端口接P21。在控制前,需要发送其地址,其地址位由A0~A2决定,在原理图中地址位全部接地,故A0~A2全为0,具体通讯方式如下:
- 写数据(单字节写入)

上图出自 AT24C02.pdf > P11 > Figure 8. Byte Write。
- 读数据(单字节读取)
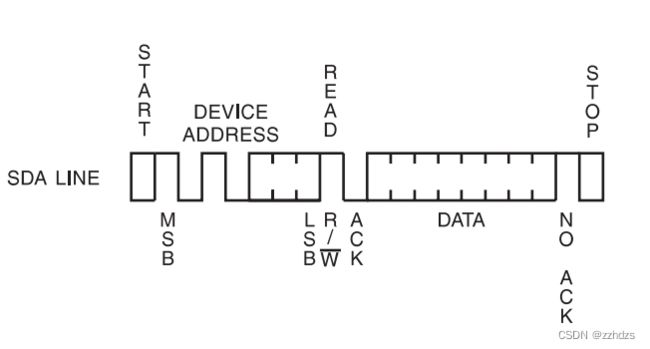
上图出自 AT24C02.pdf > P12 > Figure 10. Current Address Read。
2、引脚接入接出

3、单片机控制
本IIC通讯控制功能由官方资料提供,相关IIC通讯直接由蓝桥杯提供,这里就不写了。
#include "iic.h"
/**
* @brief 从AT24C02(add)中读出数据da
*
* @param[in] add - AT24C02存储地址
* @param[out] da - 从AT24C02相应地址中读取到的数据
* @return - da
*/
void EEPROM_Read(unsigned char* pucBuf, unsigned char addr, unsigned char num)
{
IIC_Start();
IIC_SendByte(0xA0);
IIC_WaitAck();
IIC_SendByte(addr);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xA1);
IIC_WaitAck();
while(num--)
{
*pucBuf++ = IIC_RecByte();
if(num) IIC_SendAck(0);
else IIC_SendAck(1);
}
IIC_Stop();
}
/**
* @brief 向AT24C02(add)中写入数据val
*
* @param[in] add - AT24C02存储地址
* @param[in] val - 待写入AT24C02相应地址的数据
* @return - none
*/
void EEPROM_Write(unsigned char* pucBuf, unsigned char addr, unsigned char num)
{
IIC_Start();
IIC_SendByte(0xA0);
IIC_WaitAck();
IIC_SendByte(addr);
IIC_WaitAck();
while(num--)
{
IIC_SendByte(*pucBuf++);
IIC_WaitAck();
IIC_Delay(200);
}
IIC_Stop();
}
六、CH340DS1
USB转串口芯片,不做介绍。
七、DS18B20
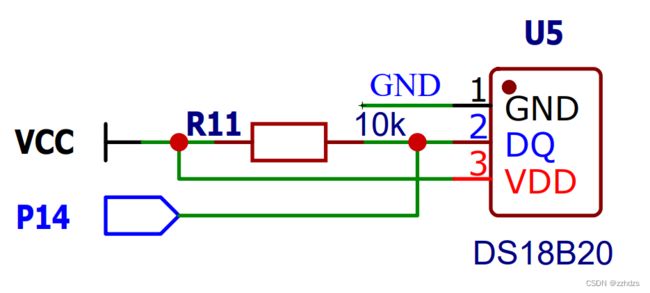
1、基本介绍
数字温度传感器,在原理图中为DS18B20(U5),采用单总线模式,所幸单总线交互的源代码在比赛时由蓝桥杯官方提供,**DS18B20(U5)**会返回两个字节数据,先返回低字节数据,再返回高字节数据,返回字节数据如下表。
| BIT 7 | BIT 6 | BIT 5 | BIT 4 | BIT 3 | BIT 2 | BIT 1 | BIT 0 | |
|---|---|---|---|---|---|---|---|---|
| LS BYTE | 23 | 22 | 21 | 20 | 2-1 | 2-2 | 2-3 | 2-4 |
| BIT 15 | BIT 14 | BIT 13 | BIT 12 | BIT 11 | BIT 10 | BIT 9 | BIT 8 | |
|---|---|---|---|---|---|---|---|---|
| MS BYTE | S | S | S | S | S | 26 | 25 | 24 |
S = SIGN
此表出自 DS18B20.pdf -> P4 -> Figure 2. Temperature Register Format。
备注:LS BYTE为低字节,MS BYTE为高字节。
在计算中可以采用(((MS_BYTE & 0x0F) << 8) + LS_BYTE) / 16.0的方式计算。
因蓝桥杯官方已给出相关通讯方式,下面直接介绍蓝桥杯官方所给的交互方法。
更多功能于 DS18B20.pdf > P10~12 > ROM COMMANDS、DS18B20 FUNCTION COMMANDS。
2、引脚接入接出
3、单片机控制
代码为官方提供,相关库函数由官方提供onewire库提供。
#include "onewire.h"
// 温度数据转换(可以将rd_temperature转换为实际温度,但无法判断温度正负)
#define Conversion_Temperature(DATA) ((DATA & 0x07FF) / 16.0)
// 温度数据获取代码
unsigned int rd_temperature(void)
{
unsigned char low, high;
init_ds18b20(); // 初始化
Write_DS18B20(0xCC); // 跳过ROM
Write_DS18B20(0x44); // 转换温度
init_ds18b20();
Write_DS18B20(0xCC);
Write_DS18B20(0xBE); // 读暂存器
low = Read_DS18B20(); // 低字节
high = Read_DS18B20(); // 高字节
return (high<<8)+low;
}
八、DS1302
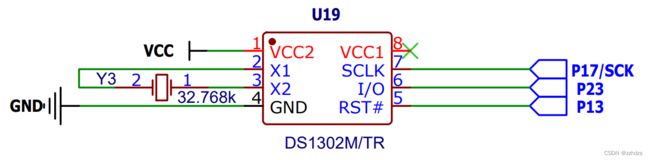
1、基本介绍
时钟芯片,在原理图中为 DS1302M/TR(U19) 可以用于计时,计时时间包括年月日分秒周,因蓝桥杯官方已给出相关通讯代码,直接介绍其初始化方式与读取方式。
- 初始化
将16进制转换为BCD码的方式:
((DATA / 10) << 4) + DATA % 10
- 读取
BCD码转16进制数据:
(DATA >> 4) * 10 + (DATA & 0x0F)
更多功能可查看 DS1302.pdf > P9 > Table 3. Register Address/Definition。
2、引脚接入接出
3、单片机控制
源代码由蓝桥杯官方提供。
#include "ds1302.h"
// 设置时钟,pucRtc所指向数组最小为3字节
void Set_RTC(unsigned char* pucRtc)
{
unsigned char temp;
Write_Ds1302_Byte(0x8E, 0); // WP=0:允许写操作
temp = ((pucRtc[0]/10)<<4)+pucRtc[0]%10;
Write_Ds1302_Byte(0x84, temp); // 设置时
temp = ((pucRtc[1]/10)<<4)+pucRtc[1]%10;
Write_Ds1302_Byte(0x82, temp); // 设置分
temp = ((pucRtc[2]/10)<<4)+pucRtc[2]%10;
Write_Ds1302_Byte(0x80, temp); // 设置秒
Write_Ds1302_Byte(0x8E, 0x80); // WP=1:禁止写操作
}
// 读取时钟,pucRtc所指向数组最小为3字节
void Read_RTC(unsigned char* pucRtc)
{
unsigned char temp;
temp = Read_Ds1302_Byte(0x85); // 读取时
pucRtc[0] = (temp>>4)*10+(temp&0x0F);
temp = Read_Ds1302_Byte(0x83); // 读取分
pucRtc[1] = (temp>>4)*10+(temp&0x0F);
temp = Read_Ds1302_Byte(0x81); // 读取秒
pucRtc[2] = (temp>>4)*10+(temp&0x0F);
}
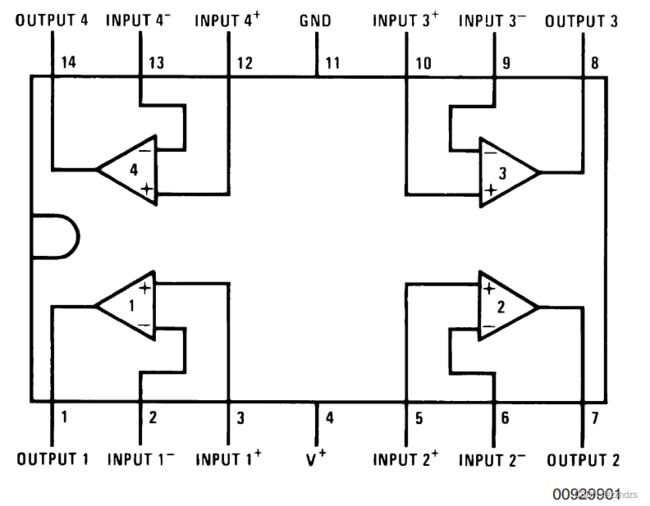
九、LM324
集成运放,原理图中为U26,不做介绍,其输出AIN2于芯片PCF8951(U16) 中进行介绍。

十、LM386
音频放大电路,在原理图中为LM386D(U14),近似为功放,不做介绍。


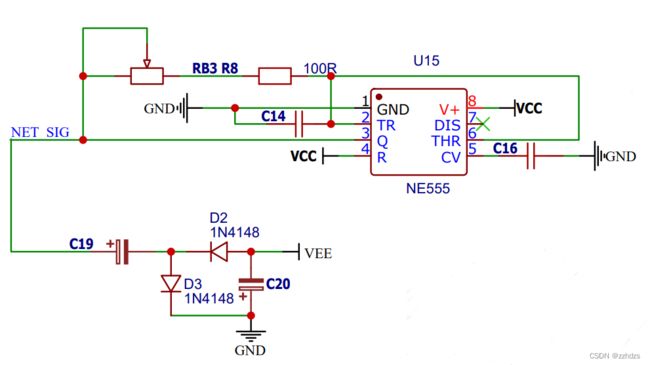
十一、LM555
NE555,在原理图中为 NE555(U15) 用于产生不同频率的波形,不做介绍。
十二、PCF8591
1、基本介绍
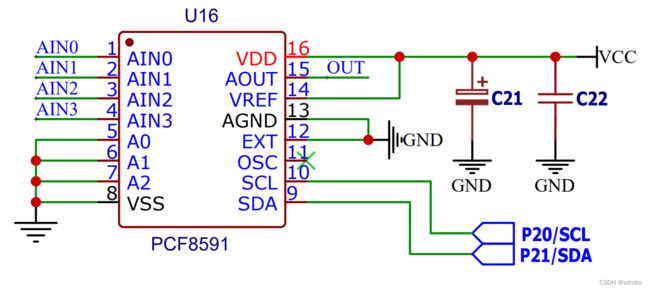
低功耗8位CMOS数据采集设备,在原理图中为PCF8591(U16),其通讯方式同样为IIC通讯,其有四个模拟输入端口与一个模拟输出端口,其功能都可根据设置自行修改,在发送数据时,需要先发送 PCF8591(U16) 的地址值,在原理图中其A0~A2均接地,所以其地址为1001 000X B(X为写入或读取字节)。
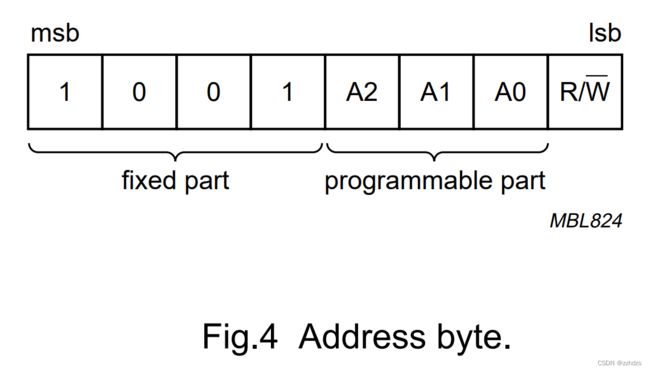
上图出自 PCF8951.pdf > P1 > Fig.4 Address byte.
以下为 PCF8591(U16) 相关功能的使用。
- ADC(模数转换)
ADC数据转换
(flaot)(Vin / 51.2)
- DAC(数模转换)
DAC数据转换:
(unsigned char)(Vout * 51.2)
更多设置可参考 PCF8951.pdf > P6 > Fig.5 Control byte。
DAC功能可参考 PCF8951.pdf > P8。
ADC功能可参考 PCF8951.pdf > P9~P10。
2、引脚接入接出
3、单片机控制
代码由蓝桥杯官方给出。
#include "iic.h"
// DAC输出值转换
#define PCF8951_VoutConversion(Vout) (unsigned char)(Vout * 51.2)
// ADC输入值转换
#define PCF8951_VinConversion(Vin) (float)(Vin / 51.2)
// 通过I2C总线读取ADC结果
unsigned char PCF8591_Adc(void)
{
unsigned char temp;
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x43); // 允许DAC,ADC通道3
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
temp = IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
return temp;
}
// DAC功能
void PCF8591_Dac(unsigned char dat)
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x43); // 允许DAC,ADC通道3
IIC_WaitAck();
IIC_SendByte(dat); // dat-输出数模转换的数据
IIC_WaitAck();
IIC_Stop();
}
十三、ULN2003
1、基本介绍
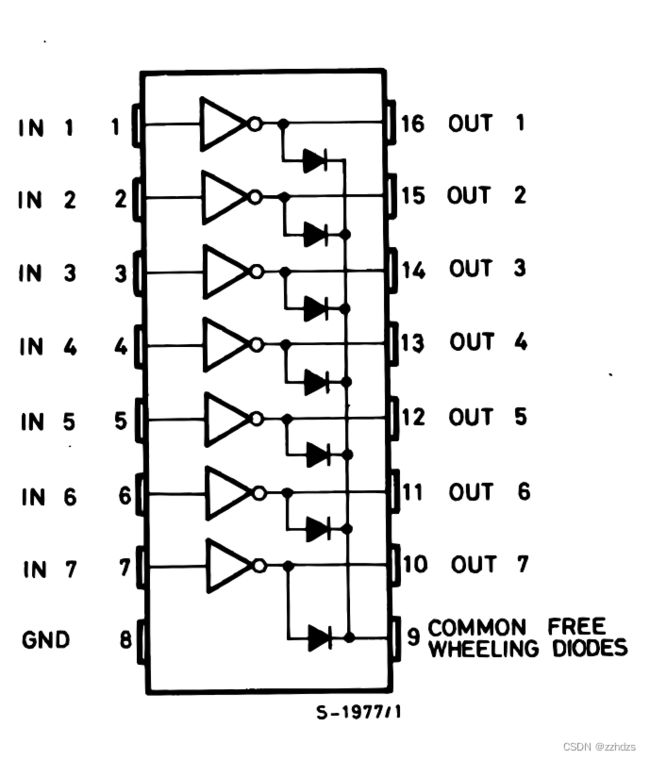
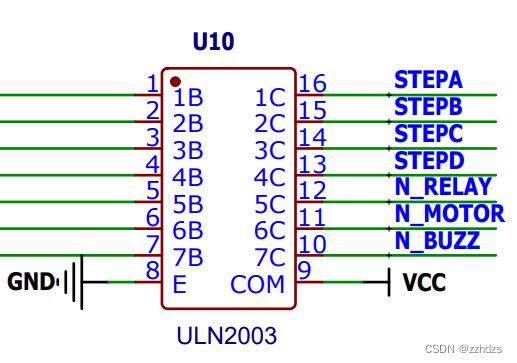
高耐压、大电流复合晶体管阵列,在原理图中为 ULN2003(U10),因STC芯片无法驱动大电流,故使用此芯片,需要注意:此芯片相当于一个非门。
2、引脚接入接出
接入
参考三、74HC_HCT573 > 2、引脚接入接出 > 接出。
接出
- 1C~4C接步进电机。
- 5C接继电器。
- 6C接直流电机。
- 7C接蜂鸣器。
3、单片机控制
参考三、74HC_HCT573 > 3、单片机控制 > 其他控制。
十四、USBCH341
USB转接芯片,不多做介绍。