抄写Linux源码(Day18:读取硬盘前的准备工作有哪些?)
回忆我们需要做的事情:
为了支持 shell 程序的执行,我们需要提供:
1.缺页中断(不理解为什么要这个东西,只是闪客说需要,后边再说)
2.硬盘驱动、文件系统 (shell程序一开始是存放在磁盘里的,所以需要这两个东西)
3.fork,execve, wait 这三个系统调用,也可以说是 进程调度 (否则无法 halt shell 程序并且启动另外的程序)
4.键盘驱动、VGA/console/uart 驱动、中断处理 (支持键盘输入和屏幕显示)
5.内存管理 (shell 启动其它进程时,不能共用内存,而是切换其它进程的页表) — 完成内核内存管理
6.为了写代码方便,我们需要从 MBR 进入到 main 函数,这也是从 汇编 切换到 C 语言 — 已经完成
7.应用程序申请内存的接口
看闪客文章 ”读取硬盘前的准备工作有哪些?“
读取硬盘数据到内存中,是操作系统的一个基础功能。
读取硬盘需要有块设备驱动程序,而以文件的方式来读取则还有要再上面包一层文件系统。
把读出来的数据放到内存,就涉及到内存中缓冲区的管理。
上面说的每一件事,都是一个十分庞大的体系,我们今天的文章一个都不展开讲,哈哈。
我们就讲讲,读取块设备与内存缓冲区之间的桥梁,块设备请求项的初始化工作。
我们以 Linux 0.11 源码为例,发现进入内核的 main 函数后不久,有这样一行代码。
void main(void) {
...
blk_dev_init();
...
}
看到这个方法的全部代码后,你可能会会心一笑,也可能一脸懵逼。
void blk_dev_init(void) {
int i;
for (i=0; i<32; i++) {
request[i].dev = -1;
request[i].next = NULL;
}
}
这也太简单了吧?
就是给 request 这个数组的前 32 个元素的两个变量 dev 和 next 附上值,看这俩值 -1 和 NULL 也可以大概猜出,这是没有任何作用时的初始化值。
我们看下 request 结构体。
/*
* Ok, this is an expanded form so that we can use the same
* request for paging requests when that is implemented. In
* paging, 'bh' is NULL, and 'waiting' is used to wait for
* read/write completion.
*/
struct request {
int dev; /* -1 if no request */
int cmd; /* READ or WRITE */
int errors;
unsigned long sector;
unsigned long nr_sectors;
char * buffer;
struct task_struct * waiting;
struct buffer_head * bh;
struct request * next;
};
注释也附上了。
哎哟,这就有点头大了,刚刚的函数虽然很短,但看到这个结构体我们知道了,重点在这呢。
这也侧面说明了,学习操作系统,其实把遇到的重要数据结构牢记心中,就已经成功一半了。比如主内存管理结构 mem_map,知道它的数据结构是什么样子,其功能也基本就懂了。
收,继续说这个 request 结构,这个结构就代表了一次读盘请求,其中:
- dev 表示设备号,-1 就表示空闲。
- cmd 表示命令,其实就是 READ 还是 WRITE,也就表示本次操作是读还是写。
- errors 表示操作时产生的错误次数。
- sector 表示起始扇区。
- nr_sectors 表示扇区数。
- buffer 表示数据缓冲区,也就是读盘之后的数据放在内存中的什么位置。
- waiting 是个 task_struct 结构,这可以表示一个进程,也就表示是哪个进程发起了这个请求。
- bh 是缓冲区头指针,这个后面讲完缓冲区就懂了,因为这个 request 是需要与缓冲区挂钩的。
- next 指向了下一个请求项。
这里有的变量看不懂没关系。
不过我们倒是可以基于现有的重点参数猜测一下,比如读请求时,cmd 就是 READ,sector 和 nr_sectors 这俩就定位了所要读取的块设备(可以简单先理解为硬盘)的哪几个扇区,buffer 就定位了这些数据读完之后放在内存的什么位置。
这就够啦,想想看,这四个参数是不是就能完整描述了一个读取硬盘的需求了?而且完全没有歧义,就像下面这样。

而其他的参数,肯定是为了更好地配合操作系统进行读写块设备操作嘛,为了把多个读写块设备请求很好地组织起来。这个组织不但要有这个数据结构中 hb 和 next 等变量的配合,还要有后面的电梯调度算法的配合,仅此而已,先点到为止。
总之,我们这里就先明白,这个 request 结构可以完整描述一个读盘操作。然后那个 request 数组就是把它们都放在一起,并且它们又通过 next 指针串成链表。
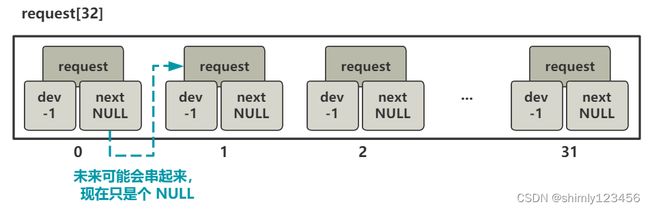
好,本文讲述的两行代码,其实就完成了上图所示的工作而已。
但讲到这就结束的话,很多同学可能会不太甘心,那我就简单展望一下,后面读盘的全流程中,是怎么用到刚刚初始化的这个 request[32] 结构的。
读操作的系统调用函数是 sys_read,源代码很长,我给简化一下,仅仅保留读取普通文件的分支,就是如下的样子。
int sys_read(unsigned int fd,char * buf,int count) {
struct file * file = current->filp[fd];
struct m_inode * inode = file->f_inode;
// 校验 buf 区域的内存限制
verify_area(buf,count);
// 仅关注目录文件或普通文件
return file_read(inode,file,buf,count);
}
看,入参 fd 是文件描述符,通过它可以找到一个文件的 inode,进而找到这个文件在硬盘中的位置。
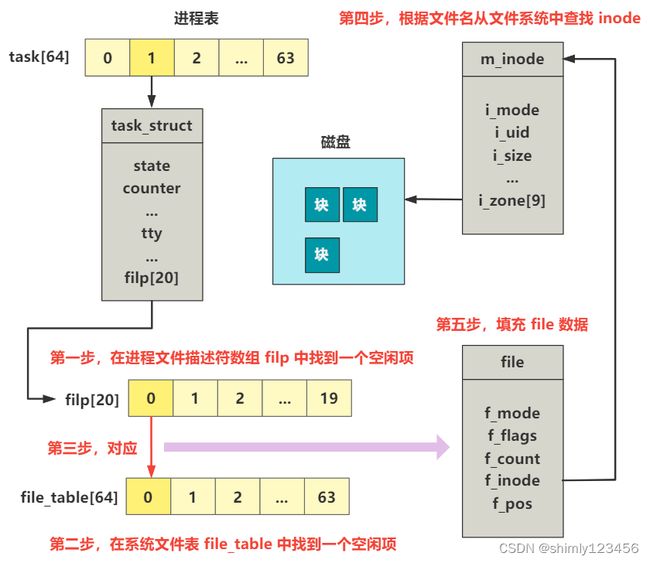
另两个入参 buf 就是要复制到的内存中的位置,count 就是要复制多少个字节,很好理解。
钻到 file_read 函数里继续看。
int file_read(struct m_inode * inode, struct file * filp, char * buf, int count) {
int left,chars,nr;
struct buffer_head * bh;
left = count;
while (left) {
if (nr = bmap(inode,(filp->f_pos)/BLOCK_SIZE)) {
if (!(bh=bread(inode->i_dev,nr)))
break;
} else
bh = NULL;
nr = filp->f_pos % BLOCK_SIZE;
chars = MIN( BLOCK_SIZE-nr , left );
filp->f_pos += chars;
left -= chars;
if (bh) {
char * p = nr + bh->b_data;
while (chars-->0)
put_fs_byte(*(p++),buf++);
brelse(bh);
} else {
while (chars-->0)
put_fs_byte(0,buf++);
}
}
inode->i_atime = CURRENT_TIME;
return (count-left)?(count-left):-ERROR;
}
整体看,就是一个 while 循环,每次读入一个块的数据,直到入参所要求的大小全部读完为止。
直接看 bread 那一行。
int file_read(struct m_inode * inode, struct file * filp, char * buf, int count) {
...
while (left) {
...
if (!(bh=bread(inode->i_dev,nr)))
}
}
这个函数就是去读某一个设备的某一个数据块号的内容,展开进去看
struct buffer_head * bread(int dev,int block) {
struct buffer_head * bh = getblk(dev,block);
if (bh->b_uptodate)
return bh;
ll_rw_block(READ,bh);
wait_on_buffer(bh);
if (bh->b_uptodate)
return bh;
brelse(bh);
return NULL;
}
其中 getblk 先申请了一个内存中的缓冲块,然后 ll_rw_block 负责把数据读入这个缓冲块,进去继续看。
void ll_rw_block(int rw, struct buffer_head * bh) {
...
make_request(major,rw,bh);
}
static void make_request(int major,int rw, struct buffer_head * bh) {
...
if (rw == READ)
req = request+NR_REQUEST;
else
req = request+((NR_REQUEST*2)/3);
/* find an empty request */
while (--req >= request)
if (req->dev<0)
break;
...
/* fill up the request-info, and add it to the queue */
req->dev = bh->b_dev;
req->cmd = rw;
req->errors=0;
req->sector = bh->b_blocknr<<1;
req->nr_sectors = 2;
req->buffer = bh->b_data;
req->waiting = NULL;
req->bh = bh;
req->next = NULL;
add_request(major+blk_dev,req);
}
看,这里就用到了刚刚说的结构咯。
具体说来,就是该函数会往刚刚的设备的请求项链表 request[32] 中添加一个请求项,只要 request[32] 中有未处理的请求项存在,都会陆续地被处理,直到设备的请求项链表是空为止。
具体怎么读盘,就是与硬盘 IO 端口进行交互的过程了,可以继续往里跟,直到看到一个 hd_out 函数为止,本讲不展开了。
具体读盘操作,后面会有详细的章节展开讲解,本讲你只需要知道,我们在 main 函数的 init 系列函数中,通过 blk_dev_init 为后面的块设备访问,提前建立了一个数据结构,作为访问块设备和内存缓冲区之间的桥梁,就可以了。
完成观看闪客文章 ”读取硬盘前的准备工作有哪些?“