【NLP】Datawhale-AI夏令营Day8-10打卡:大模型基础Transformer
⭐️ 最近参加了由Datawhale主办、联合科大讯飞、阿里云天池发起的 AI夏令营(第三期),我参与了深度学习实践-NLP(自然语言处理)方向
⭐️ 作为NLP小白,我希望能通过本次夏令营的学习实践,对NLP有初步的了解,学习大模型,动手完成NLP项目内容,同时通过社区交流学习,提升调参优化等能力
⭐️ 今天是打卡的第八天! ✊✊✊
⭐️ 虽然分数刷到1了,但是有些基础知识感觉还是不太扎实,因此这几天我复盘了一下大模型的基础——Transformer架构,在论文的基础上结合解析资料进行学习
❗️本篇博客读完大概需要20min
【NLP】Datawhale-AI夏令营Day1打卡:文本特征提取
第一天学习了Python 数据分析相关的库(pandas和sklearn),文本特征提取的方法(基于TF-IDF提取和基于BOW提取,以及停用词的用法),划分数据集的方法,以及机器学习的模型,并尝试跑通了机器学习方法baseline。
【NLP】Datawhale-AI夏令营Day2打卡:数据分析
第二天学习了数据探索、数据清洗、特征工程、模型训练与验证部分。
【NLP】Datawhale-AI夏令营Day3打卡:Bert模型
第三天学习了Bert模型(预训练+微调范式),并尝试跑通了深度学习方法baseline。
【NLP】Datawhale-AI夏令营Day4打卡:预训练+微调范式
第四天再次学习了预训练+微调范式,Transformer 和 Attention,并跑通深度学习方法baseline。
【NLP】Datawhale-AI夏令营Day5打卡:预训练模型
第五天继续尝试理解预训练模型相关知识,并跑通深度学习方法Topline。
【NLP】Datawhale-AI夏令营Day6-7打卡:大模型
第六天和第七天学习了大模型的概念,大模型的训练步骤(大尺寸预训练+指令微调+RLHF),Prompt 的概念,以及大模型微调的概念。
文章目录
- 概要
- 引言和背景
- 模型结构
-
- Embedding
- 编码器
- 解码器
- Attention
- Scaled Dot-Product Attention
- Multi-Head Attention
- Attention在模型中的应用
- Position-wise Feed-Forward Networks
- Transformer 和 RNN 的异同
- Embeddings and Softmax
- Positional Encoding
- 为什么选择自注意力机制
- 总结
✅ Transformer 论文解读
Transformer 是大模型的基础。对于 Transformer 架构的学习,推荐b站上李沐的视频:
Transformer论文逐段精读【论文精读】
原论文: Attention Is All Y ou Need
2017年发表在NIPS上面的论文《Attention Is All Y ou Need》
其他参考:
- Transformer模型详解及代码实现
- The Annotated Transformer
- 十分钟理解Transformer
- Transformer代码完全解读!
概要
在编码器(encoder)和解码器(decoder)之间一般采用CNN或者RNN,而本研究提出了一种简单的仅仅基于注意力机制的架构——Transformer,主要用于机器翻译上面。
Transformer是一种完全基于注意力的序列转录模型,它用 多头自注意力(multi-headed self-attention) 取代了编码器-解码器架构中最常用的循环层。
Transformer, a sequence transduction model based entirely onattention, replacing the recurrent layers most commonly used in encoder-decoder architectures with multi-headed self-attention.
引言和背景
RNN缺点:历史信息将存储在隐藏状态,而且由于时序模型特性,难以并行计算,计算性能比较差。
CNN缺点:对于长序列模型难以建模,如对于两个相距较远的像素,需要多层卷积才能将二者融合。
CNN优点:可以实现多个输出通道。
研究综述:已有将 attention 机制用于RNN的研究;已有自注意力机制(self-attention)和 memory networks 的相关研究,Self-attention是在单个句子不同位置上做的Attention,并得到序列的一个表示。
所提出的模型优点:不再使用传统的循环卷积层,而纯粹基于注意力机制,可以进行并行运算,计算性能高。
模型结构
编码器输入的序列(词) ( x 1 , x 2 , . . . x n ) (x_1,x_2,...x_n) (x1,x2,...xn),对应向量表示 ( z 1 , z 2 , . . . z n ) (z_1,z_2,...z_n) (z1,z2,...zn)
给定z,解码器生成序列 ( y 1 , y 2 , . . . y m ) (y_1,y_2,...y_m) (y1,y2,...ym), y t y_t yt的生成和 y 1 y_1 y1到 y t − 1 y_{t-1} yt−1有关
对于每一步解码,模型都是自回归的,即在生成下一个符号时将先前生成的符号作为附加输入。
At each step the model is auto-regressive(自回归), consuming the previously generated symbols as additional input when generating the next.
自回归:当前时刻的输入是上一时刻的输出,而不能是下一时刻的输出。
Transformer遵循这个整体架构,使用堆叠的自注意力和逐点的、全连接的编码器和解码器层。
The Transformer follows this overall architecture using stacked self-attention and point-wise, fully connected layers for both the encoder and decoder.
下图是非常经典的Transformer架构图:
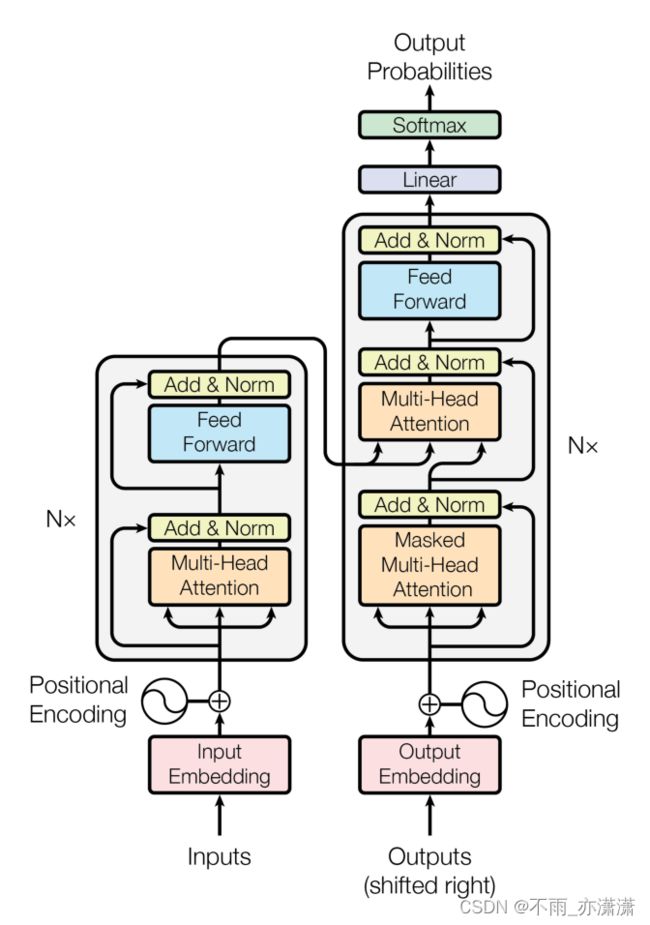
由图可见,Transformer 包含编码器和解码器两部分。对于中文翻译英文的任务来说,编码器的输入就是中文输入,而解码器对于预测任务来说其实是没有输入的,它的输入是之前时刻的输出,shifted right 表示向右移位。
✏️对于输入的文本信息,首先进入 Input Embedding 环节,就是将文本转为词的组合,然后再用向量表示每个词。编码器内部可视为多头注意力环节 (Multi-Head Self-Attention) +MLP (多层感知器),中间有残差连接 (residual)。编码器的输出作为解码器的输入,解码器相对于编码器多了一个 Masked Multi-Head Attention 环节。
Embedding
Embedding层的作用是将某种格式的输入数据,例如文本,转变为模型可以处理的向量表示,来描述原始数据所包含的信息。
class Embeddings(nn.Module):
def __init__(self, d_model, vocab):
"""
类的初始化函数
d_model:指词嵌入的维度
vocab:指词表的大小
"""
super(Embeddings, self).__init__()
#之后就是调用nn中的预定义层Embedding,获得一个词嵌入对象self.lut
self.lut = nn.Embedding(vocab, d_model)
#最后就是将d_model传入类中
self.d_model =d_model
def forward(self, x):
"""
Embedding层的前向传播逻辑
参数x:这里代表输入给模型的单词文本通过词表映射后的one-hot向量
将x传给self.lut并与根号下self.d_model相乘作为结果返回
"""
embedds = self.lut(x)
return embedds * math.sqrt(self.d_model)
编码器
编码器由N = 6个相同层的堆栈组成。每一层有两个子层。第一个是多头自注意机制(multi-head self-attention mechanism),第二个是一个简单的、位置明确的全连接前馈网络(fully connected feed-forward network,实际是MLP)。我们在每两个子层周围使用残差连接(residual connection),然后进行归一化。也就是说,每个子层的输出是 LayerNorm(x + Sublayer(x)),其中 Sublayer(x) 是子层本身实现的函数。为了方便这些残差连接,模型中的所有子层以及嵌入层产生的输出维度为 d m o d e l d_{model} dmodel = 512(维数没有减少)。
Encoder: The encoder is composed of a stack of N = 6 identical layers. Each layer has two sub-layers. The first is a multi-head self-attention mechanism, and the second is a simple, position-wise fully connected feed-forward network. We employ a residual connection around each of the two sub-layers, followed by layer normalization. That is, the output of each sub-layer is LayerNorm(x + Sublayer(x)), where Sublayer(x) is the function implemented by the sub-layer itself. To facilitate these residual connections, all sub-layers in the model, as well as the embedding layers, produce outputs of dimension dmodel = 512.
✏️规范化层的作用:它是所有深层网络模型都需要的标准网络层,因为随着网络层数的增加,通过多层的计算后输出可能开始出现过大或过小的情况,这样可能会导致学习过程出现异常,模型可能收敛非常慢。因此都会在一定层后接规范化层进行数值的规范化,使其特征数值在合理范围内。Transformer中使用的normalization手段是LayerNorm。
LayerNorm 和 BatchNorm 的区别:BatchNorm 是对一个 batch-size 样本内的每个特征做归一化,LayerNorm 是对每个样本的所有特征做归一化。经过处理之后都是均值为0方差为1。
batchNormalization与layerNormalization的区别
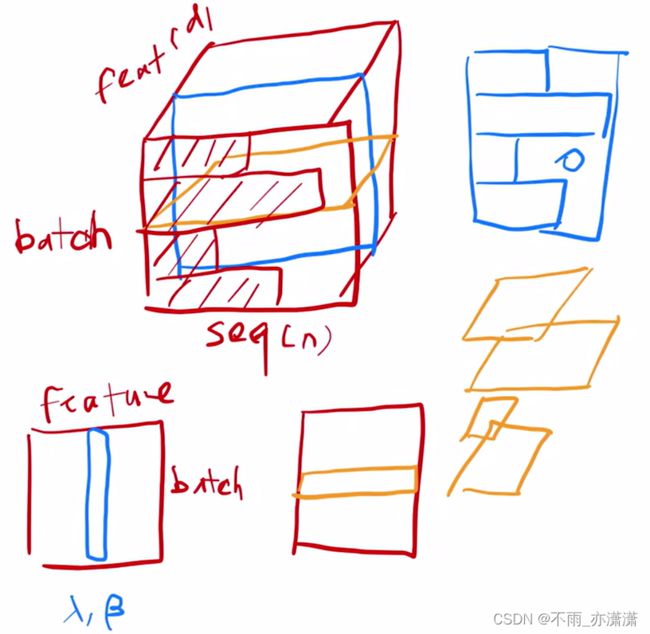
下面两个矩形是针对2维输入的情况,蓝色的是 BatchNorm 方法,黄色的是 LayerNorm 方法,可以看到两种方法的“切法”不同。一般而言 Transformer 输入是3维的,即 batch * sequence(Nx) * feature ( d m o d e l d_{model} dmodel),也就是上面的立方体的情况。
BatchNorm 方法需要存储全局的均值和方差,对于样本长度较大的情况,小批量计算时均值和方差波动较大,而 LayerNorm 方法仅针对每个样本计算均值和方差,无需存储全局的均值和方差,可以较好地应对样本长度带来的计算波动性问题。
# 定义一个clones函数,来更方便的将某个结构复制若干份
def clones(module, N):
"Produce N identical layers."
return nn.ModuleList([copy.deepcopy(module) for _ in range(N)])
class Encoder(nn.Module):
"""
Encoder
The encoder is composed of a stack of N=6 identical layers.
"""
def __init__(self, layer, N):
super(Encoder, self).__init__()
# 调用时会将编码器层传进来,我们简单克隆N分,叠加在一起,组成完整的Encoder
self.layers = clones(layer, N)
self.norm = LayerNorm(layer.size)
def forward(self, x, mask):
"Pass the input (and mask) through each layer in turn."
for layer in self.layers:
x = layer(x, mask)
return self.norm(x)
class SublayerConnection(nn.Module):
"""
实现子层连接结构的类
"""
def __init__(self, size, dropout):
super(SublayerConnection, self).__init__()
self.norm = LayerNorm(size)
self.dropout = nn.Dropout(dropout)
def forward(self, x, sublayer):
# 原paper的方案
#sublayer_out = sublayer(x)
#x_norm = self.norm(x + self.dropout(sublayer_out))
# 稍加调整的版本
sublayer_out = sublayer(x)
sublayer_out = self.dropout(sublayer_out)
x_norm = x + self.norm(sublayer_out)
return x_norm
class EncoderLayer(nn.Module):
"EncoderLayer is made up of two sublayer: self-attn and feed forward"
def __init__(self, size, self_attn, feed_forward, dropout):
super(EncoderLayer, self).__init__()
self.self_attn = self_attn
self.feed_forward = feed_forward
self.sublayer = clones(SublayerConnection(size, dropout), 2)
self.size = size # embedding's dimention of model, 默认512
def forward(self, x, mask):
# attention sub layer
x = self.sublayer[0](x, lambda x: self.self_attn(x, x, x, mask))
# feed forward sub layer
z = self.sublayer[1](x, self.feed_forward)
return z
解码器
编码器和解码器两个部分都包含输入,且两部分的输入的结构是相同的,只是推理时的用法不同,编码器只推理一次,而解码器是类似RNN那样循环推理,不断生成预测结果的。
解码器也由N = 6相同层的堆栈组成。除了每个编码器层中的两个子层之外,解码器插入第三个子层,该子层对编码器堆栈的输出执行多头注意力。与编码器类似,我们在每个子层周围使用残差连接,然后进行层规范化。我们还修改了解码器堆栈中的自注意力子层,以防止位置关注后续位置。这种掩码,再加上输出嵌入被偏移一个位置的事实,确保了位置i的预测只能依赖于位置小于i的已知输出。
Decoder: The decoder is also composed of a stack of N = 6 identical layers. In addition to the two sub-layers in each encoder layer, the decoder inserts a third sub-layer, which performs multi-head attention over the output of the encoder stack. Similar to the encoder, we employ residual connections around each of the sub-layers, followed by layer normalization. We also modify the self-attention sub-layer in the decoder stack to prevent positions from attending to subsequent positions. This masking, combined with fact that the output embeddings are offset by one position, ensures that the predictions for position i can depend only on the known outputs at positions less than i.
再次展示 Transformer 架构:
✏️掩码(Masked)是为了避免与自回归冲突(自注意力是可以获取所有输入的,包括下一时刻的输入),保证t时刻无法获取t+1时刻以后的输入,使得训练和预测行为一致。
掩码的作用:在transformer中,掩码主要的作用有两个,一个是屏蔽掉无效的padding区域,一个是屏蔽掉来自“未来”的信息。 Encoder中的掩码主要是起到第一个作用,Decoder中的掩码则同时发挥着两种作用。
屏蔽掉无效的padding区域:我们训练需要组batch进行,就以机器翻译任务为例,一个batch中不同样本的输入长度很可能是不一样的,此时我们要设置一个最大句子长度,然后对空白区域进行padding填充,而填充的区域无论在Encoder还是Decoder的计算中都是没有意义的,因此需要用mask进行标识,屏蔽掉对应区域的响应。
屏蔽掉来自未来的信息:我们已经学习了attention的计算流程,它是会综合所有时间步的计算的,那么在解码的时候,就有可能获取到未来的信息,这是不行的。因此,这种情况也需要我们使用mask进行屏蔽。现在还没介绍到Decoder,如果没完全理解,可以之后再回过头来思考下。
线性层的作用: 通过对上一步的线性变化得到指定维度的输出,也就是转换维度的作用。转换后的维度对应着输出类别的个数,如果是翻译任务,那就对应的是文字字典的大小。
def subsequent_mask(size):
#生成向后遮掩的掩码张量,参数size是掩码张量最后两个维度的大小,它最后两维形成一个方阵
"Mask out subsequent positions."
attn_shape = (1, size, size)
#然后使用np.ones方法向这个形状中添加1元素,形成上三角阵
subsequent_mask = np.triu(np.ones(attn_shape), k=1).astype('uint8')
#最后将numpy类型转化为torch中的tensor,内部做一个1- 的操作。这个其实是做了一个三角阵的反转,subsequent_mask中的每个元素都会被1减。
#如果是0,subsequent_mask中的该位置由0变成1
#如果是1,subsequect_mask中的该位置由1变成0
return torch.from_numpy(subsequent_mask) == 0
#使用类Decoder来实现解码器
class Decoder(nn.Module):
"Generic N layer decoder with masking."
def __init__(self, layer, N):
#初始化函数的参数有两个,第一个就是解码器层layer,第二个是解码器层的个数N
super(Decoder, self).__init__()
#首先使用clones方法克隆了N个layer,然后实例化一个规范化层,因为数据走过了所有的解码器层后最后要做规范化处理。
self.layers = clones(layer, N)
self.norm = LayerNorm(layer.size)
def forward(self, x, memory, src_mask, tgt_mask):
#forward函数中的参数有4个,x代表目标数据的嵌入表示,memory是编码器层的输出,source_mask,target_mask代表源数据和目标数据的掩码张量,然后就是对每个层进行循环,当然这个循环就是变量x通过每一个层的处理,得出最后的结果,再进行一次规范化返回即可。
for layer in self.layers:
x = layer(x, memory, src_mask, tgt_mask)
return self.norm(x)
#使用DecoderLayer的类实现解码器层
class DecoderLayer(nn.Module):
"Decoder is made of self-attn, src-attn, and feed forward (defined below)"
def __init__(self, size, self_attn, src_attn, feed_forward, dropout):
#初始化函数的参数有5个,分别是size,代表词嵌入的维度大小,同时也代表解码器的尺寸,第二个是self_attn,多头自注意力对象,也就是说这个注意力机制需要Q=K=V,第三个是src_attn,多头注意力对象,这里Q!=K=V,第四个是前馈全连接层对象,最后就是dropout置0比率
super(DecoderLayer, self).__init__()
self.size = size
self.self_attn = self_attn
self.src_attn = src_attn
self.feed_forward = feed_forward
#按照结构图使用clones函数克隆三个子层连接对象
self.sublayer = clones(SublayerConnection(size, dropout), 3)
def forward(self, x, memory, src_mask, tgt_mask):
#forward函数中的参数有4个,分别是来自上一层的输入x,来自编码器层的语义存储变量memory,以及源数据掩码张量和目标数据掩码张量,将memory表示成m之后方便使用。
"Follow Figure 1 (right) for connections."
m = memory
#将x传入第一个子层结构,第一个子层结构的输入分别是x和self-attn函数,因为是自注意力机制,所以Q,K,V都是x,最后一个参数时目标数据掩码张量,这时要对目标数据进行遮掩,因为此时模型可能还没有生成任何目标数据。
#比如在解码器准备生成第一个字符或词汇时,我们其实已经传入了第一个字符以便计算损失,但是我们不希望在生成第一个字符时模型能利用这个信息,因此我们会将其遮掩,同样生成第二个字符或词汇时,模型只能使用第一个字符或词汇信息,第二个字符以及之后的信息都不允许被模型使用。
x = self.sublayer[0](x, lambda x: self.self_attn(x, x, x, tgt_mask))
#接着进入第二个子层,这个子层中常规的注意力机制,q是输入x;k,v是编码层输出memory,同样也传入source_mask,但是进行源数据遮掩的原因并非是抑制信息泄露,而是遮蔽掉对结果没有意义的padding。
x = self.sublayer[1](x, lambda x: self.src_attn(x, m, m, src_mask))
#最后一个子层就是前馈全连接子层,经过它的处理后就可以返回结果,这就是我们的解码器结构
return self.sublayer[2](x, self.feed_forward)
Attention
注意力函数可以描述为将查询和一组键值对映射到输出,其中查询(query)、键(keys)、值(values)和输出(output)都是向量。输出被计算为值的加权和,其中分配给每个值的权重由查询与相应关键字的相似度函数计算。
An attention function can be described as mapping a query and a set of key-value pairs to an output, where the query, keys, values, and output are all vectors. The output is computed as a weighted sum of the values, where the weight assigned to each value is computed by a compatibility function of the query with the corresponding key.
输出的维度和值的维度是相同的,权重是由query和key的相似度(compatibility function)计算而来,不同的注意力机制对应不同的相似度计算方法。
Scaled Dot-Product Attention
这部分介绍论文所提出的注意力机制 Scaled Dot-Product Attention。
每个 query 和 key 做点积,然后将每个点积除以 ( d k ) \sqrt(d_k) (dk),其中 d k d_k dk 是queries 和 keys 的维,如果点积越大,则相似度越大,相似度越大,则权重越大,最后使用 softmax 函数来获得 key 的权重。
We call our particular attention “Scaled Dot-Product Attention”. The input consists of queries and keys of dimension d k d_k dk, and values of dimension d v d_v dv. We compute the dot products of the query with all keys, divide each by ( d k ) \sqrt(d_k) (dk), and apply a softmax function to obtain the weights on the values.
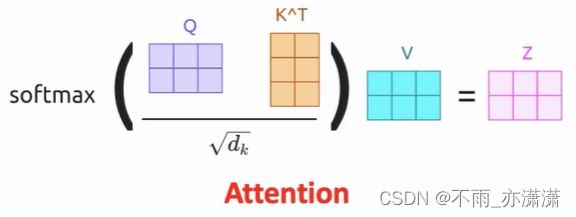
在实际中,拆成两个矩阵乘法以实现并行运算。所有的Query、Key和Value向量分别组合成矩阵Q、K和V。
In practice, we compute the attention function on a set of queries simultaneously, packed together into a matrix Q. The keys and values are also packed together into matrices K and V . We compute the matrix of outputs as:
Attention ( Q , K , V ) = softmax ( Q K T d k ) V \operatorname{Attention}(Q, K, V)=\operatorname{softmax}\left(\frac{Q K^{T}}{\sqrt{d_{k}}}\right) V Attention(Q,K,V)=softmax(dkQKT)V
两个最常用的注意力函数是加型注意力和点积(乘法)注意力。点积注意力与论文提出的算法相同,只是比例因子为 1 / ( d k ) 1/\sqrt(d_k) 1/(dk) (Scaled环节)。加型注意力使用具有单个隐藏层的前馈网络来计算兼容性函数。虽然两者在理论复杂性上相似,但点积注意力在实践中要快得多,空间效率也更高,因为它可以使用高度优化的矩阵乘法代码来实现。
The two most commonly used attention functions are additive attention, and dot-product (multiplicative) attention. Dot-product attention is identical to our algorithm, except for the scaling factor of 1 / ( d k ) 1/\sqrt(d_k) 1/(dk). Additive attention computes the compatibility function using a feed-forward network with a single hidden layer. While the two are similar in theoretical complexity, dot-product attention is much faster and more space-efficient in practice, since it can be implemented using highly optimized matrix multiplication code.
为什么要除以 ( d k ) \sqrt(d_k) (dk) ,不直接用传统的点积注意力机制而多加一个Scaled?
虽然对于较小的 d k d_k dk值,这两种机制的表现相似,但在不缩放较大的 d k d_k dk值的情况下,加型注意力优于点积注意力。我们怀疑,对于较大的 d k d_k dk值,点积的大小会变大(置信的偏向1,否则偏向0),从而将softmax函数推向具有极小梯度的区域。为了抵消这种影响,我们将点积按比例缩放 1 / ( d k ) 1/\sqrt(d_k) 1/(dk)。
While for small values of d k d_k dk the two mechanisms perform similarly, additive attention outperforms dot product attention without scaling for larger values of d k d_k dk. We suspect that for large values of d k d_k dk, the dot products grow large in magnitude, pushing the softmax function into regions where it has extremely small gradients. To counteract this effect, we scale the dot products by 1 / ( d k ) 1/\sqrt(d_k) 1/(dk) .
def attention(query, key, value, mask=None, dropout=None):
"Compute 'Scaled Dot Product Attention'"
d_k = query.size(-1)
scores = torch.matmul(query, key.transpose(-2, -1)) \
/ math.sqrt(d_k)
if mask is not None:
scores = scores.masked_fill(mask == 0, -1e9)
p_attn = F.softmax(scores, dim = -1)
if dropout is not None:
p_attn = dropout(p_attn)
return torch.matmul(p_attn, value), p_attn
✏️Mask:计算权重时,忽略Q和K在t时刻后面的乘积,具体而言,可以让计算结果乘以负无穷大,使得经过 Softmax 层时趋近于0.
Multi-Head Attention
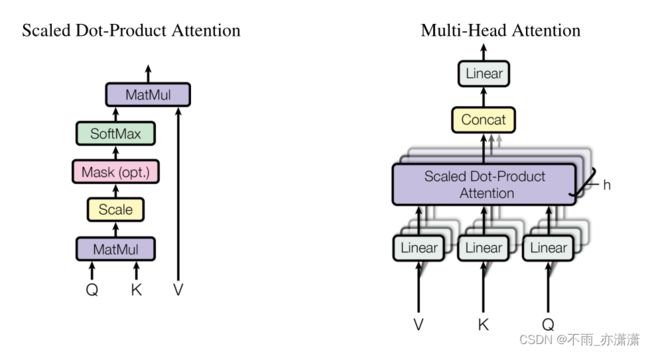
如上图所示,将查询、键值和值线性投影(Linear环节) h 次到 dk、dk 和 dv 维度,然后并行执行注意力函数(Scaled Dot-Product Attention环节),接着合并(Concat环节),最后投影(Linear环节)。
Instead of performing a single attention function with d m o d e l d_{model} dmodel-dimensional keys, values and queries, we found it beneficial to linearly project the queries, keys and values h times with different, learned linear projections to dk, dk and dv dimensions, respectively. On each of these projected versions of queries, keys and values we then perform the attention function in parallel, yielding dv-dimensional output values. These are concatenated and once again projected, resulting in the final values.
✏️投影到低维——多个输出通道
多头注意力允许模型同时关注来自不同位置的不同表示子空间的信息。 对于单一注意力头,平均会抑制这种情况。
Multi-head attention allows the model to jointly attend to information from different representation subspaces at different positions. With a single attention head, averaging inhibits this.
✏️多头注意力机制的优点:
第一个方面,它扩展了模型关注不同位置的能力,这对翻译句子特别有用。
第二个方面,它给了自注意力层多个“表示子空间”。对于多头自注意力机制,我们不只有一组Q/K/V权重矩阵,而是有多组(论文中使用8组),所以每个编码器/解码器使用8个“头”(可以理解为8个互不干扰自的注意力机制运算),每一组的Q/K/V都不相同。然后,得到8个不同的权重矩阵Z,每个权重矩阵被用来将输入向量投射到不同的表示子空间。经过多头注意力机制后,就会得到多个权重矩阵Z,我们将多个Z进行拼接就得到了self-attention层的输出,上述我们经过了self-attention层,我们得到了self-attention的输出,self-attention的输出即是前馈神经网络层的输入,然后前馈神经网络的输入只需要一个矩阵就可以了,不需要八个矩阵,所以我们需要把这8个矩阵压缩成一个,把这些矩阵拼接起来然后用一个额外的权重矩阵与之相乘,最终的Z就作为前馈神经网络的输入。
MultiHead ( Q , K , V ) = Concat ( head 1 , … , head h ) W O where head = Attention ( Q W i Q , K W i K , V W i V ) \begin{aligned} \operatorname{MultiHead}(Q, K, V) & =\operatorname{Concat}\left(\operatorname{head}_{1}, \ldots, \operatorname{head}_{\mathrm{h}}\right) W^{O} \\ \text { where head } & =\operatorname{Attention}\left(Q W_{i}^{Q}, K W_{i}^{K}, V W_{i}^{V}\right) \end{aligned} MultiHead(Q,K,V) where head =Concat(head1,…,headh)WO=Attention(QWiQ,KWiK,VWiV)
Where the projections are parameter matrices W i Q ∈ R d model × d k , W i K ∈ R d model × d k , W i V ∈ R d model × d v W_{i}^{Q} \in \mathbb{R}^{d_{\text {model }} \times d_{k}}, W_{i}^{K} \in \mathbb{R}^{d_{\text {model }} \times d_{k}}, W_{i}^{V} \in \mathbb{R}^{d_{\text {model }} \times d_{v}} WiQ∈Rdmodel ×dk,WiK∈Rdmodel ×dk,WiV∈Rdmodel ×dv and W O ∈ R h d v × d model W^{O} \in \mathbb{R}^{h d_{v} \times d_{\text {model }}} WO∈Rhdv×dmodel .
In this work we employ h=8 parallel attention layers, or heads. For each of these we use d k = d v = d model / h = 64 d_{k}=d_{v}=d_{\text {model }} / h=64 dk=dv=dmodel /h=64 . Due to the reduced dimension of each head, the total computational cost is similar to that of single-head attention with full dimensionality.
class MultiHeadedAttention(nn.Module):
def __init__(self, h, d_model, dropout=0.1):
"Take in model size and number of heads."
super(MultiHeadedAttention, self).__init__()
assert d_model % h == 0
# We assume d_v always equals d_k
self.d_k = d_model // h
self.h = h
self.linears = clones(nn.Linear(d_model, d_model), 4)
self.attn = None
self.dropout = nn.Dropout(p=dropout)
def forward(self, query, key, value, mask=None):
"Implements Figure 2"
if mask is not None:
# Same mask applied to all h heads.
mask = mask.unsqueeze(1)
nbatches = query.size(0)
# 1) Do all the linear projections in batch from d_model => h x d_k
query, key, value = \
[l(x).view(nbatches, -1, self.h, self.d_k).transpose(1, 2)
for l, x in zip(self.linears, (query, key, value))]
# 2) Apply attention on all the projected vectors in batch.
x, self.attn = attention(query, key, value, mask=mask,
dropout=self.dropout)
# 3) "Concat" using a view and apply a final linear.
x = x.transpose(1, 2).contiguous() \
.view(nbatches, -1, self.h * self.d_k)
return self.linears[-1](x)
Attention在模型中的应用
Transformer中以三种不同的方式使用了“多头”Attention:
- 在"Encoder-Decoder Attention"层,Query来自先前的解码器层,并且Key和Value来自Encoder的输出。Decoder中的每个位置Attend输入序列中的所有位置,这与Seq2Seq模型中的经典的Encoder-Decoder Attention机制一致。
- Encoder中包含Self-attention层。在Self-attention层中,所有的Key、Value和Query都来同一个地方,这里都是来自Encoder中前一层的输出。Encoder中当前层的每个位置都能Attend到前一层的所有位置。
- 类似的,解码器中的Self-attention层允许解码器中的每个位置注意当前解码位置和它前面的所有位置。这里需要屏蔽解码器中向左的信息流以保持自回归属性。具体的实现方式是在缩放后的点积Attention中,屏蔽(设为负无穷)Softmax的输入中所有对应着非法连接的Value。
The Transformer uses multi-head attention in three different ways:
-
In “encoder-decoder attention” layers, the queries come from the previous decoder layer, and the memory keys and values come from the output of the encoder. This allows every position in the decoder to attend over all positions in the input sequence. This mimics the typical encoder-decoder attention mechanisms in sequence-to-sequence models.
-
The encoder contains self-attention layers. In a self-attention layer all of the keys, values and queries come from the same place, in this case, the output of the previous layer in the encoder. Each position in the encoder can attend to all positions in the previous layer of the encoder.
-
Similarly, self-attention layers in the decoder allow each position in the decoder to attend to all positions in the decoder up to and including that position. We need to prevent leftward information flow in the decoder to preserve the auto-regressive property. We implement this inside of scaled dot-product attention by masking out (setting to −∞) all values in the input of the softmax which correspond to illegal connections.

Position-wise Feed-Forward Networks
除了注意力子层之外,我们的编码器和解码器中的每个层都包含一个全连接的前馈网络,该网络单独且相同地应用于每个位置。这由两个线性变换组成,中间有一个 ReLU 激活。
In addition to attention sub-layers, each of the layers in our encoder and decoder contains a fully connected feed-forward network, which is applied to each position separately and identically. This consists of two linear transformations with a ReLU activation in between.
F F N ( x ) = m a x ( 0 , x W 1 + b 1 ) W 2 + b 2 FFN(x) = max(0, xW_1 + b_1)W_2 + b_2 FFN(x)=max(0,xW1+b1)W2+b2
虽然不同位置的线性变换是相同的,但它们在层与层之间使用不同的参数。另一种描述方式是使用两个内核大小为 1 的卷积。
While the linear transformations are the same across different positions, they use different parameters from layer to layer. Another way of describing this is as two convolutions with kernel size 1.
输入和输出的维数为 dmodel = 512,内层的维数为 dff = 2048。
The dimensionality of input and output is dmodel = 512, and the inner-layer has dimensionality dff = 2048.
✏️这里的位置(position)指的是词(输入的序列拆成的词)。
全连接的前馈网络实际上是一个多层感知器(MLP)。
x W 1 + b 1 xW_1 + b_1 xW1+b1:Linear;
m a x ( 0 , x W 1 + b 1 ) max(0, xW_1 + b_1) max(0,xW1+b1):ReLU,ReLU的数学表达式:f(x)=max(0,x);
外面再加一层Linear
Feed Forward Layer 其实就是简单的由两个前向全连接层组成,核心在于,Attention模块每个时间步的输出都整合了所有时间步的信息,而Feed Forward Layer每个时间步只是对自己的特征的一个进一步整合,与其他时间步无关。
class PositionwiseFeedForward(nn.Module):
"Implements FFN equation."
def __init__(self, d_model, d_ff, dropout=0.1):
super(PositionwiseFeedForward, self).__init__()
self.w_1 = nn.Linear(d_model, d_ff)
self.w_2 = nn.Linear(d_ff, d_model)
self.dropout = nn.Dropout(dropout)
def forward(self, x):
return self.w_2(self.dropout(F.relu(self.w_1(x))))
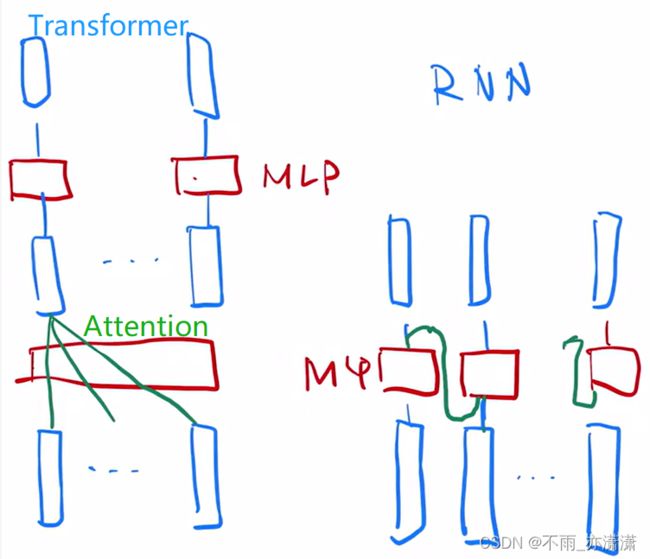
Transformer 和 RNN 的异同
✏️两者都是用MLP(线性层)完成语义空间转换,不同的是序列信息的处理,RNN把上一时刻的输出信息传入作为下一时刻的输入,而Transformer通过Attention层全局地获取整个序列的信息,然后再用MLP作转换。
下图不考虑残差连接,不考虑多头注意力:
Embeddings and Softmax
与其他序列转换模型类似,我们使用预学习的 Embedding 将输入 Token(词) 序列和输出Token序列转化为 d m o d e l d_{model} dmodel 维向量,我们还使用常用的预训练的线性变换和 Softmax 函数将解码器输出转换为预测下一个 Token 的概率。在我们的模型中,我们在两个 Embedding 层和 Pre-softmax 线性变换之间使用相同的权重矩阵。在Embedding层中,我们将这些权重乘以 d m o d e l \sqrt{d_{model}} dmodel .
Similarly to other sequence transduction models, we use learned embeddings to convert the input tokens and output tokens to vectors of dimension dmodel. We also use the usual learned linear transformation and softmax function to convert the decoder output to predicted next-token probabilities. In our model, we share the same weight matrix between the two embedding layers and the pre-softmax linear transformation. In the embedding layers, we multiply those weights by √dmodel.
class Embeddings(nn.Module):
def __init__(self, d_model, vocab):
super(Embeddings, self).__init__()
self.lut = nn.Embedding(vocab, d_model)
self.d_model = d_model
def forward(self, x):
return self.lut(x) * math.sqrt(self.d_model)
Positional Encoding
✏️为什么需要 Positional Encoding?是因为 Attention 不像RNN那样的循环结构有前后不同的先后顺序,所有的时间步是同时输入,并行推理的,不存在时序信息,即便顺序变了,输出值也不变,而实际上词的顺序是会影响语义的。为了解决这个问题,需要把时序信息引入进来。RNN对此的解决方法是将上一时刻的输出作为下一时刻的输入,因此能够处理时序信息。
由于我们的模型不包含递归和卷积结构,为了使模型能够有效利用序列的顺序特征,我们需要加入序列中各个 Token 间相对位置或 Token 在序列中绝对位置的信息。 在这里,我们将位置编码添加到编码器和解码器栈底部的输入 Embedding。由于位置编码与 Embedding 具有相同的维度 d m o d e l d_{model} dmodel ,因此两者可以直接相加,其实这里还有许多位置编码可供选择,其中包括可更新的和固定不变的。
Since our model contains no recurrence and no convolution, in order for the model to make use of the order of the sequence, we must inject some information about the relative or absolute position of the tokens in the sequence. To this end, we add “positional encodings” to the input embeddings at the bottoms of the encoder and decoder stacks. The positional encodings have the same dimension dmodel as the embeddings, so that the two can be summed.
在此项工作中,我们使用不同频率的正弦和余弦函数:
In this work, we use sine and cosine functions of different frequencies:
P E ( p o s , 2 i ) = s i n ( p o s / 1000 0 2 i / d model ) PE_{(pos,2i)} = sin(pos / 10000^{2i/d_{\text{model}}}) PE(pos,2i)=sin(pos/100002i/dmodel)
P E ( p o s , 2 i + 1 ) = c o s ( p o s / 1000 0 2 i / d model ) PE_{(pos,2i+1)} = cos(pos / 10000^{2i/d_{\text{model}}}) PE(pos,2i+1)=cos(pos/100002i/dmodel)
其中pos是位置,i是维度,也就是说,位置编码的每个维度都对应于一个正弦曲线,其波长形成从 2 π 2\pi 2π到 10000 ⋅ 2 π 10000 \cdot 2\pi 10000⋅2π的等比级数。我们选择这个函数是因为我们假设它可以让模型很容易地通过相对位置来学习,因为对于任何固定的偏移量 k k k, P E p o s + k PE_{pos+k} PEpos+k可以表示为 P E p o s PE_{pos} PEpos的线性函数。
where p o s pos pos is the position and i i i is the dimension. That is, each dimension of the positional encoding corresponds to a sinusoid. The wavelengths form a geometric progression from 2 π 2\pi 2π to 10000 ⋅ 2 π 10000 \cdot 2\pi 10000⋅2π. We chose this function because we hypothesized it would allow the model to easily learn to attend by relative positions, since for any fixed offset k k k, P E p o s + k PE_{pos+k} PEpos+k can be represented as a linear function of P E p o s PE_{pos} PEpos.
此外,在编码器和解码器堆栈中,我们在Embedding与位置编码的加和上都使用了Dropout机制,在基本模型上,我们使用 P d r o p = 0.1 P_{drop}=0.1 Pdrop=0.1的比率。
In addition, we apply dropout to the sums of the embeddings and the positional encodings in both the encoder and decoder stacks. For the base model, we use a rate of P d r o p = 0.1 P_{drop}=0.1 Pdrop=0.1.
思考:为什么上面的公式可以作为位置编码?
在上面公式的定义下,时间步p和时间步p+k的位置编码的内积,也就是说,任意两个相距k个时间步的位置编码向量的内积都是相同的,这就相当于蕴含了两个时间步之间相对位置关系的信息。此外,每个时间步的位置编码又是唯一的,这两个很好的性质使得上面的公式作为位置编码是有理论保障的。
可以认为,最终模型的输入是若干个时间步对应的embedding,每一个时间步对应一个embedding,可以理解为是当前时间步的一个综合的特征信息,即包含了本身的语义信息,又包含了当前时间步在整个句子中的位置信息。
class PositionalEncoding(nn.Module):
"Implement the PE function."
def __init__(self, d_model, dropout, max_len=5000):
super(PositionalEncoding, self).__init__()
self.dropout = nn.Dropout(p=dropout)
# Compute the positional encodings once in log space.
pe = torch.zeros(max_len, d_model)
position = torch.arange(0, max_len).unsqueeze(1)
div_term = torch.exp(torch.arange(0, d_model, 2) *
-(math.log(10000.0) / d_model))
pe[:, 0::2] = torch.sin(position * div_term)
pe[:, 1::2] = torch.cos(position * div_term)
pe = pe.unsqueeze(0)
self.register_buffer('pe', pe)
def forward(self, x):
x = x + Variable(self.pe[:, :x.size(1)],
requires_grad=False)
return self.dropout(x)
为什么选择自注意力机制
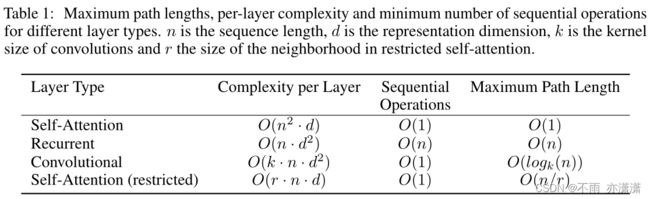
4种不同层对比的指标:
一是每层的总计算复杂度。
二是可以并行化的计算量,以所需的最小顺序操作数来衡量。
三是最大距离。
Attention 对模型做的假设较少,需要更多的数据才能实现和RNN、CNN差不多的效果。
总结
Transformer 优点:
需要调的参数比较少:N(编码器解码器层数)、 d m o d e l d_{model} dmodel(嵌入层产生的输出维度)、h(投影次数)。
提出了多头注意力机制的概念,提高了自注意力层的性能。
适用于并行化计算,可以降低序列处理任务的计算量,操作次数则被减少到了常数级别。
后续问题:
图与代码不一致,Transformer论文被发现错误!!!