步进电机基础(2.4)- HB型步进电机的转子齿数与主极数之间的关系
步进电机基础(2.4)- HB型步进电机的转子齿数与主极数之间的关系
- 前言
-
- 基本信息
- 公式
- 前言说明
- HB型步进电机的转子齿数与主极数之间的关系
-
- 1. HB步进电机的相数、转子齿数、主极数之间的表达式
- 2. 相内磁路的一般表达式
- 3. 相间磁路的一般形式
前言
基本信息
| 名称 | 描述说明 |
|---|---|
| 教材名称 | 步进电机应用技术 |
| 作者 | 坂本正文 |
| 译者 | 王自强 |
公式
θs = 180° /P*Nr 公式(2. 1)
步进电机的步距角θs,其中Nr 为转子极对数,P为定子相数
θs = ± [ (360°/mP) - (360°n/Nr) ] 公式(2. 2)
Nt =m (nP±1/2) 公式(2. 3)
此为相内磁路时,转子齿Nr 与相数P、主极数m的表达式。式(2. 3)中Nr 必为整数,否则没有意义。此时要注意m必须为偶数。
前言说明
根据我读的《步进电机应用技术》这本书,进行的学习过程中的知识记录和心得体会的记录。
HB型步进电机的转子齿数与主极数之间的关系
到现在已经学习了步进电机的工作原理、结构,读者一定关心步进电机的相数、转子齿数与主极数之间有什么关系。设计步进电机时肯定要了解这些关系。对于使用步进电机的客户,更重要的是详细了解步进电机的结构和性能。本节将介绍其一般的关系式。
1. HB步进电机的相数、转子齿数、主极数之间的表达式
如 HB型步进电机为P相,转子齿数Nr , 则依据式(2. 1) 可知其步距角0, 为
θs=180°/PNr
此时,定子1相主极数(AA相的总和)为m个,均匀配置,其内径配的多个细齿齿数相同。转子永久磁铁产生磁通的磁路如图2. 27 (a) 中的虚线所示,在AA 间形成闭合磁路。与后面叙述的三相HB和五相 HB型等奇数相不完全相同,在AA间不能形成闭合磁路,需要跨接到B相、C相等其他相形成闭合磁路。前者被称为相内磁路式,后者称为相间磁路式。
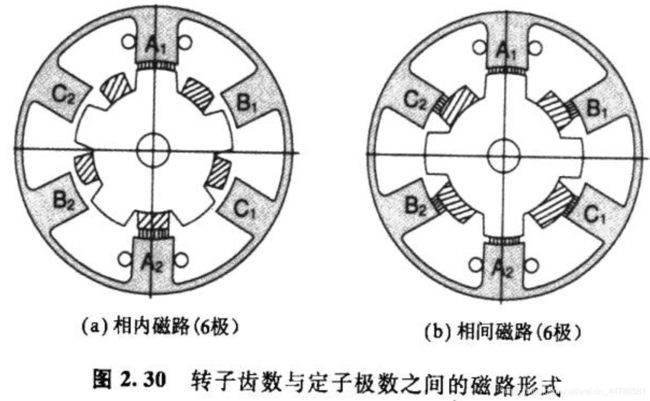
两相 HB型步进电机皆为相内磁路,而三相 HB型步进电机存在相内磁路和相间磁路两种形式。图2. 30为三相HB型步进电机,有6个磁极,极上并没有小齿,转子齿数也少,图2. 30描述了定子和转子的磁通路径,其中(a) 为相内磁路, (b) 为相间磁路。
例如图2. 30 (a) 相内磁路的情况,定子主极A1与相邻B相的B1或C相的C2, 向下一相激磁时,会对与A1同极性的转子齿产生吸引力。在永久磁铁后侧的五个转子齿用剖面线表示,其与前侧的转子齿极性相反。同样图2. 30 (b) 为相间磁路,定子主极A1与相邻 B相的B1 或C相的C2, 向下一相激磁时,会对与A1 异性的转子齿产生吸引力。永久磁铁后侧的四个转子齿用剖面线表示,与前侧转子齿极性相反,与(a) 磁路相同。
2. 相内磁路的一般表达式
图 2.31 (a) 为相内磁路,主磁极北有mP个,由于节距相等,相邻相市A相和B相之间的节距①为360°/mP 当A相通激磁电流时,其磁极与转子极性相反的齿相对应,当再给B相通电,并在B磁极上产生与A 相相问的极性时,转子齿转动到B相上 为简化起见,图中A、B相定子齿由多齿简化为单齿。

此时,与A相相对的转子齿与B相其次要相对的转子齿的节距②如图所示为360°n/N, (n为整数),则步距角为①与②之差:
θs = ± [ (360°/mP) - (360°n/Nr) ] 公式(2. 2)
将式(2. 1) 代入式(2. 2) 得:
Nt =m (nP±1/2) 公式(2. 3)
此为相内磁路时,转子齿Nr 与相数P、主极数m的表达式。式(2. 3)中Nr 必为整数,否则没有意义。此时要注意m必须为偶数。
两相HB型步进电机,当P=2时,主极为8 (m=4) 代入式(2. 3) , 得
Nr = 8n±2 公式(2. 4)
此为两相HB型步进电机的关系式。两相 HB型步进电机的步距角为通常的1. 8°, 将n=6代入式(2. 4) , 得Nr =50.
两相HB型步进电机主极为8, 转子齿为50个的结构如图2. 32所示。

图2. 32 两相HB型步进电机(8主极、50齿、1. 8°) 的结构两相HB型步进电机的步距角为0. 9°, 主极为16,m=8,n=6, 得转子齿为100个的结构如图2. 33所示。
两相3. 6°步进电机主极为4 (在定转子间会产生不平衡电磁力,所以不鼓励使用此结构)时,依式(2. 3) , 当 P=2,m=2,n=6时,得Nr =25。图2. 34为两相,4 主极,3. 6°的步进电机结构,其外形为42mm步进电机,用于5寸48TPI的FDD (软盘驱动器)上。当为三相时,由式(2. 3) ,m= 4, =4, P=3, 得Nr =50.主极数为mP=12,θs 为1. 2°(如图7. 1、图]7.3、图7. 5、图8. 11、图8. 20、图8. 21所示)。

3. 相间磁路的一般形式
图2. 31 (b) 为相间磁路,定子节距相等,主极数合计为mP个,相邻A相和B相之间的节距①与相内磁路节距相同,为360°/mP。A 相激磁,与其极性相反的转子齿相对吸引。其次给B相激磁产生与A 相相同的极性,吸引相应的转子齿。为便于理解,将多齿结构简化为单齿结构。
此时,与A相所对转子齿和B相将相对的转子齿之间的节距②为 360° (n士1/2) /Nr (n整数),如图所示。故步距角为①和②之差:
θs = (-/+) {(360°/mP)-[360°(n±1/2)/Nr]} 公式 (2. 5)
将式(2. 1) 代入式(2. 5) 得
Nr =m [P (n±1/2) (一/+)(1/2)] 公式(2. 6)
如相间磁路为三相,令P=3, 则得
Nr =m (3n±1) 公式(2. 7)
三相时,主磁极为3的倍数,最简单的三相3主极时,m=1变成式:
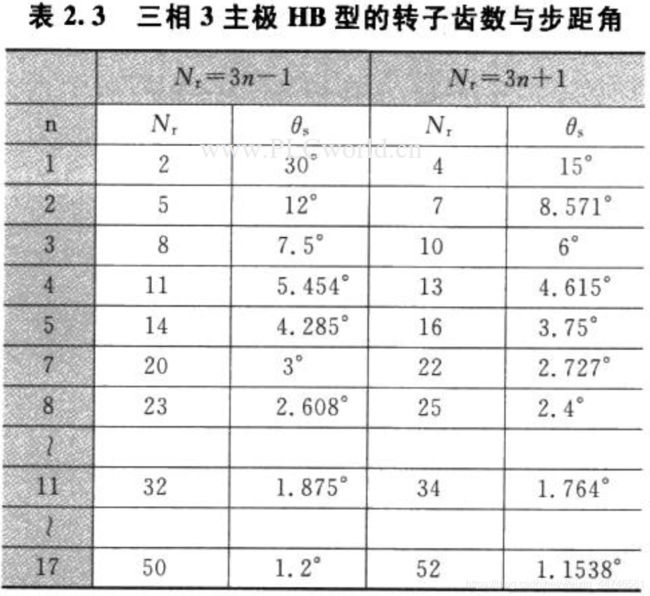
Nr =3n±1 公式(2. 8)
图2. 35为n=3, N, =8的结构图,由式(2. 8) 和式(2. 1) 计算求得, 和θs , 如表2. 3所示。
设计时要注意,三主极的 HB 型步进电机会产生不平衡电磁力。于只用三个线圈,所以对用于低价电动机的应用场合很有吸引力。
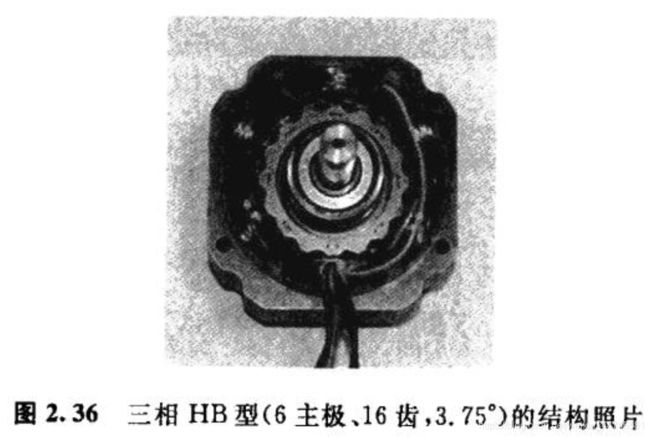
三相6主极时,m=2, 得下式:
Nr =2 (3n士1)
n=3, N, =16, 步距角3. 75°的电机结构如图2. 36所示。
三相9主极时,m=3, 则
Nr =3 (3n士1) 公式(2. 10)
n=7, Nr =60, 步距角1°的电机,轴向剖视如图 2. 37 所示为图 2.32的简化图。
三相12主极时,m=4, 则
Nr =4 (3n士1) 公式(2. 11)
n=8,Nr=100,步距角0.6°的电机轴向剖视图如图2.38所示。


上述简要介绍了相内磁路和相间磁路,以及定子主极等节距对称情况下 HB型步进电机的相数、主极数和转子齿数之间的关系表达式。不仅设计电机时要了解这些基本原理,而且使用电机时也要系统了解电机的结构、性能、外形尺寸,并能够依据相数和步距角推出电机内部结构及解决问题的方法。