机器学习-53-RL-05-Q-Learning for Continuous Actions(强化学习-Q学习处理连续动作的四个方法)
文章目录
-
- Q-Learning for Continuous Actions
-
- Solution 1 & Solution 2
- Solution 3: Design a network
- 机器手臂例子
- Solution 4: Don't use Q-learning
Q-Learning for Continuous Actions
继续讲一下 Q-learning,其实跟 policy gradient based 方法比起来,Q-learning 是比较稳的。policy gradient 是没有太多游戏是玩得起来的,policy gradient 比较不稳,尤其在没有 PPO 之前,你很难用 policy gradient 做什么事情。Q-learning 相对而言是比较稳的。
最早 DeepMind 的 paper 拿 deep reinforcement learning 来玩 Atari 的游戏,用的就是 Q-learning。
Q-learning 比较容易 train 的一个理由是:在 Q-learning 里面,你只要能够 estimate 出 Q-function,就保证你一定可以找到一个比较好的 policy。也就是你只要能够 estimate 出 Q-function,就保证你可以 improve 你的 policy。
而 estimate Q-function 这件事情,是比较容易的,因为它就是一个 regression problem。在这个 regression problem 里面, 你可以轻易地知道 model learn 得是不是越来越好,只要看那个 regression 的 loss 有没有下降,你就知道说你的 model learn 得好不好,所以 estimate Q-function 相较于 learn 一个 policy 是比较容易的。你只要 estimate Q-function,就可以保证说现在一定会得到比较好的 policy。所以一般而言 Q-learning 比较容易操作。
Q-learning 有什么问题呢?
最大的问题是它不太容易处理 continuous action。很多时候 action 是 continuous 的。什么时候你的 action 会是 continuous 的呢?
我们玩 Atari 的游戏,你的 agent 只需要决定比如说上下左右,这种 action 是 discrete 的。
那很多时候你的 action 是 continuous 的。举例来说:
- 假设你的 agent 要做的事情是开自驾车,它要决定说它方向盘要左转几度, 右转几度,这是 continuous 的
- 假设 agent 是一个机器人,它身上有 50 个 关节,它的每一个 action 就对应到它身上的这 50 个关节的角度。而那些角度也是 continuous 的
所以很多时候 action 并不是一个 discrete 的东西,它是一个 vector。在这个 vector 里面,它的每一个 dimension 都有一个对应的 value,都是 real number,它是 continuous 的。假设 action 是 continuous 的,做 Q-learning 就会有困难。因为在做 Q-learning 里面一个很重要的一步是你要能够解这个 optimization problem。你 estimate 出 Q-function Q ( s , a ) Q(s,a) Q(s,a) 以后,必须要找到一个 a,它可以让 Q ( s , a ) Q(s,a) Q(s,a) 最大。
- 假设 a 是 discrete 的,那 a 的可能性都是有限的。举例来说,Atari 的小游戏里面,a 就是上下左右跟开火,它是有限的,你可以把每一个可能的 action 都带到 Q 里面算它的 Q value
- 但假如 a 是 continuous 的,你无法穷举所有可能的 continuous action,试试看哪一个 continuous action 可以让 Q 的 value 最大
所以怎么办呢?在概念上,我们就是要能够解这个问题。怎么解这个问题呢?就有各种不同的 solution。
Solution 1 & Solution 2
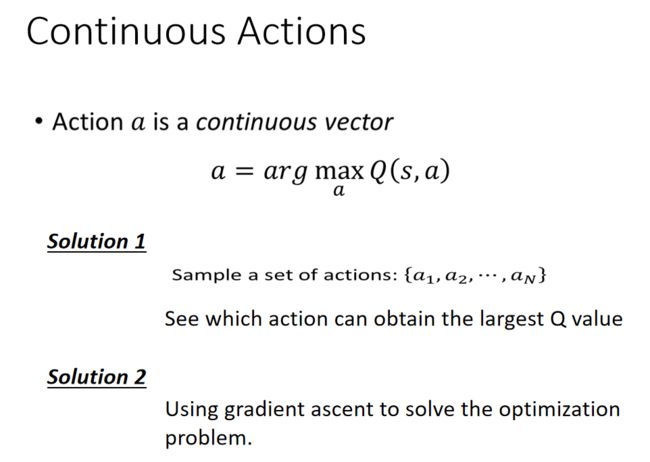
第一个 solution 是假设你不知道怎么解这个问题,因为 a 是没有办法穷举的。怎么办?用 sample 的。Sample 出 N 个 可能的 a,一个一个带到 Q-function 里面,看谁最快。 这个方法其实也不会太不 efficient, 因为你真的在运算的时候,你会用 GPU,一次会把 N 个 continuous action 都丢到 Q-function 里面,一次得到 N 个 Q value,然后看谁最大。当然这不是一个非常精确的做法,因为你没有办法做太多的 sample, 所以你 estimate 出来的 Q value,你最后决定的 action 可能不是非常的精确, 这是第一个 solution。
第二个 solution 是什么呢?既然要解的是一个 optimization problem,其实是要 maximize objective function,要 maximize 一个东西, 就可以用 gradient ascent。 你就把 a 当作是 parameter,然后你要找一组 a 去 maximize 你的 Q-function,你就用 gradient ascent 去 update a 的 value,最后看看你能不能找到一个 a 去 maximize 你的 Q-function,也就是你的 objective function。当然这样子你会遇到 global maximum 的问题, 就不见得能够真的找到 optimal 的结果,而且这个运算量显然很大, 因为你要迭代地 update a。我们 train 一个 network 就很花时间了。如果你用 gradient ascent 的方法来处理 continuous 的 problem, 等于是你每次要决定 take 哪一个 action 的时候,你都还要做一次 train network 的 process,显然运算量是很大的。这是第二个 solution。
Solution 3: Design a network
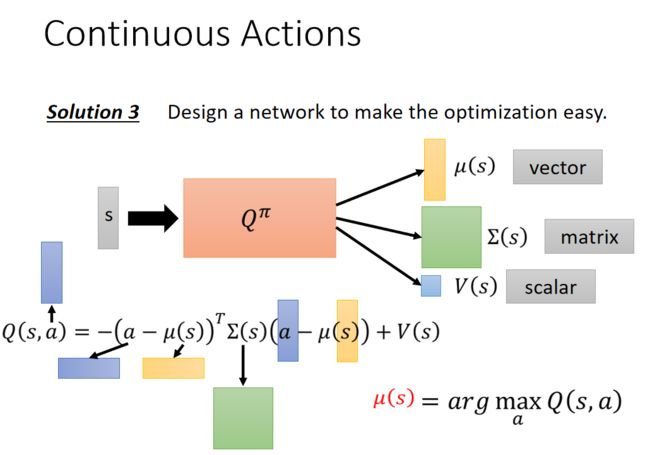
第三个 solution 是特别 design 一个 network 的架构,特别 design 你的 Q-function,使得解 arg max 的 problem 变得非常容易。也就是这边的 Q-function 不是一个 general 的 Q-function,特别设计一下它的样子,让你要找让这个 Q-function 最大的 a 的时候非常容易。
上图是一个例子,这边有我们的 Q-function,这个 Q-function 的做法是这样。
-
Input state s,通常它就是一个 image,可以用一个向量或一个 matrix 来表示。
-
Input 这个 s,Q-function 会 output 3 个东西:
- μ ( s ) \mu(s) μ(s):这是一个 vector;
- Σ ( s ) \Sigma(s) Σ(s):这是一个 matrix;
- V ( s ) V(s) V(s):这是一个 scalar
-
output 这 3 个东西以后,我们知道 Q-function 其实是吃一个 s 跟 a,然后决定一个 value。Q-function 意思是说在某一个 state,take 某一个 action 的时候,你 expected 的 reward 有多大。到目前为止这个 Q-function 只吃 s,它还没有吃 a 进来,a 在哪里呢?当这个 Q-function 吐出 μ \mu μ、 Σ \Sigma Σ 跟 V V V 的时候,我们才把 a 引入,用 a 跟 μ ( s ) \mu(s) μ(s)、 Σ ( s ) \Sigma(s) Σ(s)、 V V V 互相作用一下,你才算出最终的 Q value。
-
a 怎么和这 3 个东西互相作用呢?
实际上 Q ( s , a ) Q(s,a) Q(s,a),你的 Q-function 的运作方式是先 input s,让你得到 μ , Σ \mu,\Sigma μ,Σ 跟 V。然后再 input a,然后接下来把 a 跟 μ \mu μ 相减。注意一下 a 现在是 continuous 的 action,所以它也是一个 vector。
假设你现在是要操作机器人的话,这个 vector 的每一个 dimension,可能就对应到机器人的某一个关节,它的数值就是关节的角度,所以 a 是一个 vector。
把 a 的这个 vector 减掉 μ \mu μ 的这个 vector,取 transpose,所以它是一个横的 vector。 Σ \Sigma Σ 是一个 matrix。然后 a 减掉 μ ( s ) \mu(s) μ(s) ,a 和 μ ( s ) \mu(s) μ(s) 都是 vector,减掉以后还是一个竖的 vector。所以 :
− ( a − μ ( s ) ) T Σ ( s ) ( a − μ ( s ) ) + V ( s ) -(a-\mu(s))^{T} \Sigma(s)(a-\mu(s))+V(s) −(a−μ(s))TΣ(s)(a−μ(s))+V(s)
是一个 scalar,这个数值就是 Q value Q ( s , a ) Q(s,a) Q(s,a),。 -
假设 Q ( s , a ) Q(s,a) Q(s,a) 定义成这个样子,我们要怎么找到一个 a 去 maximize 这个 Q value 呢?
这个 solution 非常简单,什么样的 a, 可以让这一个 Q-function 最终的值最大呢?。因为 − ( a − μ ( s ) ) T Σ ( s ) ( a − μ ( s ) ) + V ( s ) -(a-\mu(s))^{T} \Sigma(s)(a-\mu(s))+V(s) −(a−μ(s))TΣ(s)(a−μ(s))+V(s) 一定是正的,它前面乘上一个负号,所以第一项就假设我们不看这个负号的话,第一项的值越小,最终的 Q value 就越大。因为我们是把 V(s) 减掉第一项,所以第一项的值越小,最后的 Q value 就越大。怎么让第一项的值最小呢?你直接把 a 代入 μ \mu μ 的值,让它变成 0,就会让第一项的值最小。
-
Σ \Sigma Σ 一定是正定的。因为这个东西就像是 Gaussian distribution,所以 μ \mu μ就是 Gaussian 的 mean, Σ \Sigma Σ 就是 Gaussian 的 variance。但 variance 是一个 positive definite 的 matrix,怎么样让这个 Σ \Sigma Σ 一定是 positive definite 的 matrix 呢?其实在 Q π Q^{\pi} Qπ 里面,它不是直接 output Σ \Sigma Σ,如果直接 output 一个 Σ \Sigma Σ, 它不一定是 positive definite 的 matrix。它其实是 output 一个 matrix,然后再把那个 matrix 跟另外一个 matrix 做 transpose 相乘, 然后可以确保 Σ \Sigma Σ 是 positive definite 的。这边要强调的点就是说,实际上它不是直接 output 一个 matrix。你再去那个 paper 里面 check 一下它的 trick,它可以保证说 Σ \Sigma Σ 是 positive definite 的。
综上,你把 a 代入 μ ( s ) \mu(s) μ(s) 以后,你可以让 Q 的值最大。所以假设要你 arg max 这个东西,虽然一般而言,若 Q 是一个 general function, 你很难算,但是我们这边 design 了 Q 这个 function,a 只要设 μ ( s ) \mu(s) μ(s),我们就得到最大值。你在解这个 arg max 的 problem 的时候就变得非常容易。
所以 Q-learning 也可以用在 continuous 的 case,只是有一些局限,就是 function 不能够随便乱设,它必须有一些限制。
机器手臂例子
视频地址: Deep Reinforcement Learning for Robotic Manipulation
Solution 4: Don’t use Q-learning
第 4 招就是不要用 Q-learning。 用 Q-learning 处理 continuous action 还是比较麻烦。
我们讲了 policy-based 的方法 PPO 和 value-based 的方法 Q-learning,这两者其实是可以结合在一起的, 也就是 Actor-Critic 的方法。