深度学习-卷积神经网络详解
卷积神经网络
二维卷积层
卷积神经网络(convolutional neural network)是含有卷积层(convolutional layer)的神经网络。本章中介绍的卷积神经网络均使用最常见的二维卷积层。它有高和宽两个空间维度,常用来处理图像数据。本节中,我们将介绍简单形式的二维卷积层的工作原理。
二维互相关运算
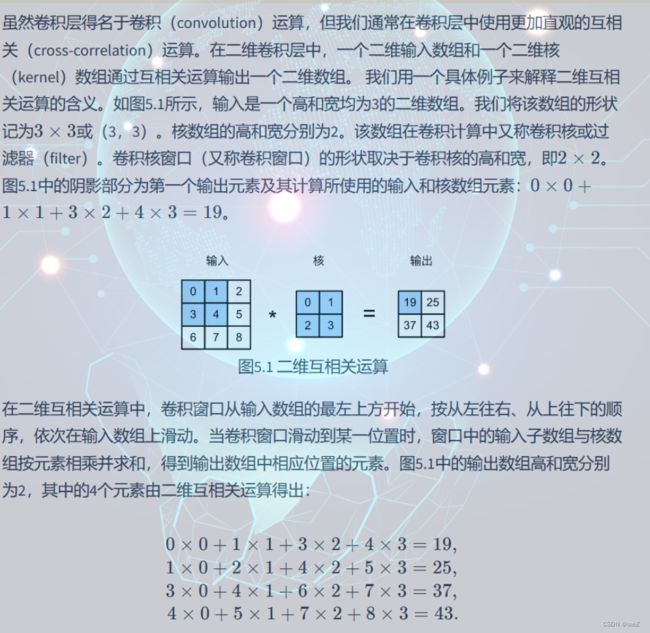
下面我们将上述过程实现在 corr2d函数里。它接受输入数组 X与核数组 K,并输出数组 Y
import torch
from torch import nn
def corr2d(X, K):
h, w = K.shape # 将高度保存在变量h中,将宽度保存在变量w中
Y = torch.zeros((X.shape[0] - h + 1, X.shape[1] - w + 1)) # 创建一个全零张量Y,其形状为(X的高度 - K的高度 + 1, X的宽度 - K的宽度 + 1)
for i in range(Y.shape[0]): # 遍历Y张量
for j in range(Y.shape[1]):
Y[i, j] = (X[i: i + h, j: j + w] * K).sum()
'''计算Y张量中索引为(i, j)位置的值。
这里使用了切片操作X[i: i + h, j: j + w]来获取与核K对应的切片,
然后与核K进行逐元素相乘,并调用.sum()方法求和,得到Y张量中对应位置的值'''
return Y
'''我们可以构造图5.1中的输入数组X、核数组K来验证二维互相关运算的输出'''
X = torch.tensor([[0, 1, 2], [3, 4, 5], [6, 7, 8]])
K = torch.tensor([[0, 1], [2, 3]])
print(corr2d(X, K))
#output:
tensor([[19., 25.],
[37., 43.]])
二维卷积层
二维卷积层将输入和卷积核做互相关运算,并加上一个标量偏差来得到输出。卷积层的模型参数包括了卷积核和标量偏差。在训练模型的时候,通常我们先对卷积核随机初始化,然后不断迭代卷积核和偏差。
下面基于 corr2d函数来实现一个自定义的二维卷积层。在构造函数 __init__里我们声明 weight和 bias这两个模型参数。前向计算函数 forward则是直接调用 corr2d函数再加上偏差。
class Conv2D(nn.Module):
def __init__(self, kernel_size):
super(Conv2D, self).__init__()
self.weight = nn.Parameter(torch.randn(kernel_size))
self.bias = nn.Parameter(torch.randn(1))
def forward(self, x):
return corr2d(x, self.weight) + self.bias
卷积窗口形状为p×q的卷积层称为p×q卷积层。同样,p×q卷积或p×q卷积核说明卷积核的高和宽分别为p和q
图像中物体的边缘检测
下面我们来看一个卷积层的简单应用:检测图像中物体的边缘,即找到像素变化的位置。首先我们构造一张6×8的图像(即高和宽分别为6像素和8像素的图像)。它中间4列为黑(0),其余为白(1)
X = torch.ones(6, 8)
X[:, 2:6] = 0
然后我们构造一个高和宽分别为1和2的卷积核 K。当它与输入做互相关运算时,如果横向相邻元素相同,输出为0;否则输出为非0
'''
卷积核K的第一个元素是1,第二个元素是-1。当卷积核在输入张量上滑动时,它会将相邻两个元素进行相乘并求和。
如果相邻两个元素的差异较大,互相关运算的结果将是一个较大的非零值;
如果相邻两个元素的差异较小或相等,互相关运算的结果将接近于0
'''
K = torch.tensor([[1, -1]])
下面将输入 X和我们设计的卷积核 K做互相关运算。可以看出,我们将从白到黑的边缘和从黑到白的边缘分别检测成了1和-1。其余部分的输出全是0
Y = corr2d(X, K)
print(y)
#output
tensor([[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.]])
由此,我们可以看出,卷积层可通过重复使用卷积核有效地表征局部空间
通过数据学习核数组
最后我们来看一个例子,它使用物体边缘检测中的输入数据 X和输出数据 Y来学习我们构造的核数组 K。我们首先构造一个卷积层,其卷积核将被初始化成随机数组。接下来在每一次迭代中,我们使用平方误差来比较 Y和卷积层的输出,然后计算梯度来更新权重
# 构造一个核数组形状是(1, 2)的二维卷积层
conv2d = Conv2D(kernel_size=(1, 2))
step = 20
lr = 0.01
for i in range(step):
Y_hat = conv2d(X)
l = ((Y_hat - Y) ** 2).sum()
l.backward()
# 梯度下降
conv2d.weight.data -= lr * conv2d.weight.grad
conv2d.bias.data -= lr * conv2d.bias.grad
# 梯度清0
conv2d.weight.grad.fill_(0)
conv2d.bias.grad.fill_(0)
if (i + 1) % 5 == 0:
print('Step %d, loss %.3f' % (i + 1, l.item()))
#output
Step 5, loss 10.258
Step 10, loss 2.851
Step 15, loss 0.793
Step 20, loss 0.221
可以看到,20次迭代后误差已经降到了一个比较小的值。现在来看一下学习到的卷积核的参数。
print("weight: ", conv2d.weight.data)
print("bias: ", conv2d.bias.data)
#output
weight: tensor([[ 0.9522, -0.9496]])
bias: tensor([-0.0015])
可以看到,学到的卷积核的权重参数与我们之前定义的核数组 K较接近,而偏置参数接近0
完整代码:
import torch
from torch import nn
def corr2d(X, K):
h, w = K.shape # 获取卷积核K的高度和宽度
Y = torch.zeros((X.shape[0] - h + 1, X.shape[1] - w + 1)) # 创建一个全零张量Y作为卷积结果的容器
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i, j] = (X[i: i + h, j: j + w] * K).sum() # 计算卷积结果
return Y
class Conv2D(nn.Module):
def __init__(self, kernel_size):
super(Conv2D, self).__init__()
self.weight = nn.Parameter(torch.randn(kernel_size))
self.bias = nn.Parameter(torch.randn(1))
def forward(self, x):
return corr2d(x, self.weight) + self.bias
X = torch.ones(6, 8)
X[:, 2:6] = 0
K = torch.tensor([[1, -1]])
Y = corr2d(X, K)
# 构造一个核数组形状是(1, 2)的二维卷积层
conv2d = Conv2D(kernel_size=(1, 2))
step = 20
lr = 0.01
for i in range(step):
Y_hat = conv2d(X)
l = ((Y_hat - Y) ** 2).sum()
l.backward()
# 梯度下降
conv2d.weight.data -= lr * conv2d.weight.grad
conv2d.bias.data -= lr * conv2d.bias.grad
# 梯度清0
conv2d.weight.grad.fill_(0)
conv2d.bias.grad.fill_(0)
if (i + 1) % 5 == 0:
print('Step %d, loss %.3f' % (i + 1, l.item()))
print("weight: ", conv2d.weight.data)
print("bias: ", conv2d.bias.data)
互相关运算和卷积运算
实际上,卷积运算与互相关运算类似。 为了得到卷积运算的输出,我们只需将核数组左右翻转并上下翻转,再与输入数组做互相关运算 。可见,卷积运算和互相关运算虽然类似,但如果它们使用相同的核数组,对于同一个输入,输出往往并不相同。
那么,你也许会好奇卷积层为何能使用互相关运算替代卷积运算。其实,在深度学习中核数+组都是学出来的:卷积层无论使用互相关运算或卷积运算都不影响模型预测时的输出。为了解释这一点,假设卷积层使用互相关运算学出图5.1中的核数组。设其他条件不变,使用卷积运算学出的核数组即图5.1中的核数组按上下、左右翻转。也就是说,图5.1中的输入与学出的已翻转的核数组再做卷积运算时,依然得到图5.1中的输出。为了与大多数深度学习文献一致,如无特别说明,本书中提到的卷积运算均指互相关运算。
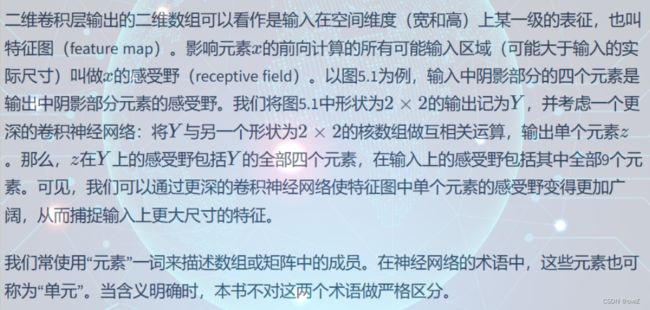
特征图和感受野
填充和步幅
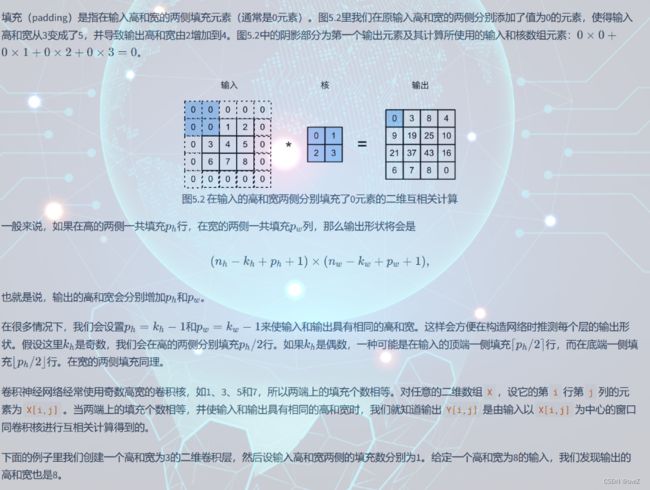
填充
import torch
from torch import nn
# 定义一个函数来计算卷积层。它对输入和输出做相应的升维和降维
def comp_conv2d(conv2d, X):
# (1, 1)代表批量大小和通道数(“多输入通道和多输出通道”一节将介绍)均为1
X = X.view((1, 1) + X.shape)
Y = conv2d(X)
return Y.view(Y.shape[2:]) # 排除不关心的前两维:批量和通道
# 注意这里是两侧分别填充1行或列,所以在两侧一共填充2行或列
conv2d = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=3, padding=1)
X = torch.rand(8, 8)
print(comp_conv2d(conv2d, X).shape)
#output:torch.Size([8, 8])
当卷积核的高和宽不同时,我们也可以通过设置高和宽上不同的填充数使输出和输入具有相同的高和宽
# 使用高为5、宽为3的卷积核。在高和宽两侧的填充数分别为2和1
conv2d = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=(5, 3), padding=(2, 1))
print(comp_conv2d(conv2d, X).shape)
步幅
conv2d = nn.Conv2d(1, 1, kernel_size=3, padding=1, stride=2)
print(comp_conv2d(conv2d, X).shape)
#output:torch.Size([4, 4])
接下来是一个稍微复杂点儿的例子
conv2d = nn.Conv2d(1, 1, kernel_size=(3, 5), padding=(0, 1), stride=(3, 4))
print(comp_conv2d(conv2d, X).shape)
#output:torch.Size([2, 2])

总之:
- 填充可以增加输出的高和宽。这常用来使输出与输入具有相同的高和宽。
- 步幅可以减小输出的高和宽,例如输出的高和宽仅为输入的高和宽的1/n
多输入通道和多输出通道
多输入通道
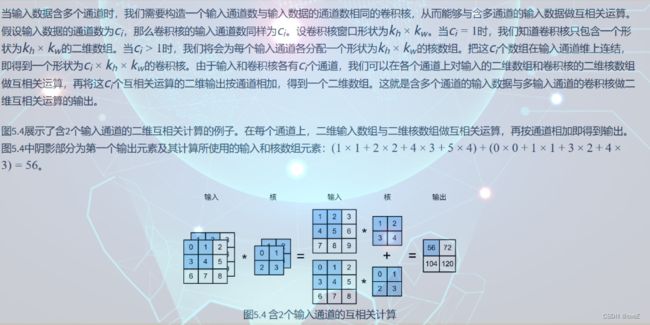
接下来我们实现含多个输入通道的互相关运算。我们只需要对每个通道做互相关运算,然后通过 add_n函数来进行累加。
import torch
from torch import nn
import sys
import d2lzh_pytorch as d2l
import torch
from torch import nn
import sys
import d2lzh_pytorch as d2l
def corr2d_multi_in(X, K): # 输入数组和核数组
# 沿着X和K的第0维(通道维)分别计算再相加
res = d2l.corr2d(X[0, :, :], K[0, :, :])
for i in range(1, X.shape[0]): # 遍历了输入数组的其他通道
res += d2l.corr2d(X[i, :, :], K[i, :, :]) # 对每个通道和对应的核数组进行二维互相关运算,并将结果累加到变量res中
return res
'''我们可以构造图5.4中的输入数组X、核数组K来验证互相关运算的输出'''
X = torch.tensor([[[0, 1, 2], [3, 4, 5], [6, 7, 8]],
[[1, 2, 3], [4, 5, 6], [7, 8, 9]]])
K = torch.tensor([[[0, 1], [2, 3]], [[1, 2], [3, 4]]])
print(corr2d_multi_in(X, K))
#output:
tensor([[ 56., 72.],
[104., 120.]])
多输出通道
下面我们实现一个互相关运算函数来计算多个通道的输出
def corr2d_multi_in_out(X, K):
# 对K的第0维遍历,每次同输入X做互相关计算。所有结果使用stack函数合并在一起
return torch.stack([corr2d_multi_in(X, k) for k in K])
我们将核数组 K同 K+1(K中每个元素加一)和 K+2连结在一起来构造一个输出通道数为3的卷积核
K = torch.stack([K, K + 1, K + 2])
K.shape # torch.Size([3, 2, 2, 2])
下面我们对输入数组 X与核数组 K做互相关运算。此时的输出含有3个通道。其中第一个通道的结果与之前输入数组 X与多输入通道、单输出通道核的计算结果一致
corr2d_multi_in_out(X, K)
#output
tensor([[[ 56., 72.],
[104., 120.]],
[[ 76., 100.],
[148., 172.]],
[[ 96., 128.],
[192., 224.]]])
1×1卷积层
下面我们使用全连接层中的矩阵乘法来实现1×1卷积。这里需要在矩阵乘法运算前后对数据形状做一些调整。
def corr2d_multi_in_out_1x1(X, K):
c_i, h, w = X.shape # 通道数,高度,宽度
c_o = K.shape[0] # 获取卷积核张量K的形状,并将其第一个维度的大小赋值给变量c_o
X = X.view(c_i, h * w) # 将输入张量X的每个通道的空间信息展平为一个特征向量
K = K.view(c_o, c_i) # 调整卷积核张量的形状以适应全连接层的矩阵乘法操作
Y = torch.mm(K, X) # 全连接层的矩阵乘法
return Y.view(c_o, h, w) # 将展平后的输出特征向量重新恢复为特征图的形状
经验证,做1×1卷积时,以上函数与之前实现的互相关运算函数 corr2d_multi_in_out等价
X = torch.rand(3, 3, 3)
K = torch.rand(2, 3, 1, 1)
Y1 = corr2d_multi_in_out_1x1(X, K)
Y2 = corr2d_multi_in_out(X, K)
print((Y1 - Y2).norm().item() < 1e-6) # true
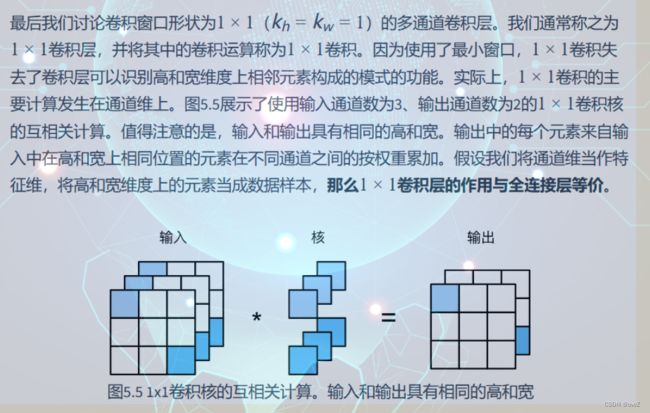
在之后的模型里我们将会看到1×11×11×1卷积层被当作保持高和宽维度形状不变的全连接层使用。于是,我们可以通过调整网络层之间的通道数来控制模型复杂度
小结
- 使用多通道可以拓展卷积层的模型参数。
- 假设将通道维当作特征维,将高和宽维度上的元素当成数据样本,那么1×1卷积层的作用与全连接层等价。
- 1×1卷积层通常用来调整网络层之间的通道数,并控制模型复杂度
池化层
回忆一下,在5.1节(二维卷积层)里介绍的图像物体边缘检测应用中,我们构造卷积核从而精确地找到了像素变化的位置。设任意二维数组 X的 i行 j列的元素为 X[i, j]。如果我们构造的卷积核输出 Y[i, j]=1,那么说明输入中 X[i, j]和 X[i, j+1]数值不一样。这可能意味着物体边缘通过这两个元素之间。但实际图像里,我们感兴趣的物体不会总出现在固定位置:即使我们连续拍摄同一个物体也极有可能出现像素位置上的偏移。这会导致同一个边缘对应的输出可能出现在卷积输出 Y中的不同位置,进而对后面的模式识别造成不便。
池化操作的本质是对输入特征图进行降采样,通过对局部区域内的特征进行汇聚,减少特征的空间维度。这种汇聚的过程可以看作是对特征的概括或提炼,将原始特征信息进行压缩和摘要,提取出最显著的特征
在本节中我们介绍池化(pooling)层,它的提出是 为了缓解卷积层对位置的过度敏感性 。
二维最大池化层和平均池化层
同卷积层一样,池化层每次对输入数据的一个固定形状窗口(又称池化窗口)中的元素计算输出。不同于卷积层里计算输入和核的互相关性,池化层直接计算池化窗口内元素的最大值或者平均值。该运算也分别叫做最大池化或平均池化。在二维最大池化中,池化窗口从输入数组的最左上方开始,按从左往右、从上往下的顺序,依次在输入数组上滑动。当池化窗口滑动到某一位置时,窗口中的输入子数组的最大值即输出数组中相应位置的元素。
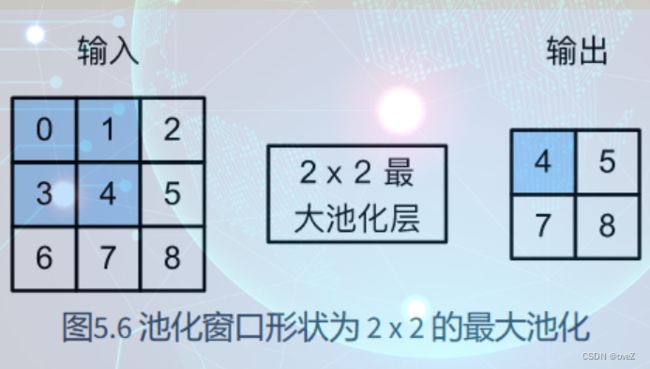
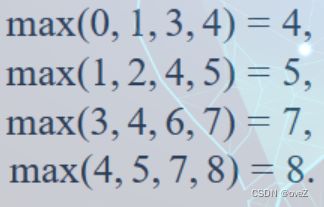
图5.6展示了池化窗口形状为2×2的最大池化,阴影部分为第一个输出元素及其计算所使用的输入元素。输出数组的高和宽分别为2,其中的4个元素由取最大值运算max得出
二维平均池化的工作原理与二维最大池化类似,但将最大运算符替换成平均运算符。池化窗口形状为p×q的池化层称为p×q池化层,其中的池化运算叫作p×q池化。
让我们再次回到本节开始提到的物体边缘检测的例子。现在我们将卷积层的输出作为2×2最大池化的输入。设该卷积层输入是 X、池化层输出为 Y。无论是 X[i, j]和 X[i, j+1]值不同,还是 X[i, j+1]和 X[i, j+2]不同,池化层输出均有 Y[i, j]=1。也就是说,使用2×2最大池化层时,只要卷积层识别的模式在高和宽上移动不超过一个元素,我们依然可以将它检测出来。
下面把池化层的前向计算实现在 pool2d函数里。它跟5.1节(二维卷积层)里 corr2d函数非常类似,唯一的区别在计算输出 Y上
import torch
from torch import nn
def pool2d(X, pool_size, mode='max'):
X = X.float()
p_h, p_w = pool_size # 从池化窗口大小pool_size中获取池化窗口的高度p_h和宽度p_w
Y = torch.zeros(X.shape[0] - p_h + 1, X.shape[1] - p_w + 1) # 创建一个全零张量Y,其形状为输入张量X经过池化后的输出形状
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
if mode == 'max':
Y[i, j] = X[i: i + p_h, j: j + p_w].max()
elif mode == 'avg':
Y[i, j] = X[i: i + p_h, j: j + p_w].mean()
return Y
'''我们可以构造图5.6中的输入数组X来验证二维最大池化层的输出'''
X = torch.tensor([[0, 1, 2], [3, 4, 5], [6, 7, 8]])
print(pool2d(X, (2, 2)))
#output:
tensor([[4., 5.],
[7., 8.]])
'''同时我们实验一下平均池化层'''
print(pool2d(X, (2, 2), 'avg'))
#output
tensor([[2., 3.],
[5., 6.]])
填充和步幅
同卷积层一样,池化层也可以在输入的高和宽两侧的填充并调整窗口的移动步幅来改变输出形状。池化层填充和步幅与卷积层填充和步幅的工作机制一样。我们将通过 nn模块里的二维最大池化层 MaxPool2d来演示池化层填充和步幅的工作机制。我们先构造一个形状为(1, 1, 4, 4)的输入数据,前两个维度分别是批量和通道
X = torch.arange(16, dtype=torch.float).view((1, 1, 4, 4))
print(X)
#output:
tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]]]])
默认情况下,MaxPool2d实例里步幅和池化窗口形状相同。下面使用形状为(3, 3)的池化窗口,默认获得形状为(3, 3)的步幅
pool2d = nn.MaxPool2d(3)
pool2d(X)
我们可以手动指定步幅和填充
pool2d = nn.MaxPool2d(3, padding=1, stride=2)
print(pool2d(X))
#output:
tensor([[[[ 5., 7.],
[13., 15.]]]])
当然,我们也可以指定非正方形的池化窗口,并分别指定高和宽上的填充和步幅
pool2d = nn.MaxPool2d((2, 4), padding=(1, 2), stride=(2, 3))
#output:
tensor([[[[ 1., 3.],
[ 9., 11.],
[13., 15.]]]])
多通道
在处理多通道输入数据时, 池化层对每个输入通道分别池化,而不是像卷积层那样将各通道的输入按通道相加 。这意味着池化层的输出通道数与输入通道数相等。下面将数组 X和 X+1在通道维上连结来构造通道数为2的输入
X = torch.cat((X, X + 1), dim=1)
print(X)
#output:
tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]],
[[ 1., 2., 3., 4.],
[ 5., 6., 7., 8.],
[ 9., 10., 11., 12.],
[13., 14., 15., 16.]]]])
池化后,我们发现输出通道数仍然是2
pool2d = nn.MaxPool2d(3, padding=1, stride=2)
print(pool2d(X))
#output:
tensor([[[[ 5., 7.],
[13., 15.]],
[[ 6., 8.],
[14., 16.]]]])
小结
- 最大池化和平均池化分别取池化窗口中输入元素的最大值和平均值作为输出。
- 池化层的一个主要作用是缓解卷积层对位置的过度敏感性。
- 可以指定池化层的填充和步幅。
- 池化层的输出通道数跟输入通道数相同。
卷积神经网络
在3.9节(多层感知机的从零开始实现)里我们构造了一个含单隐藏层的多层感知机模型来对Fashion-MNIST数据集中的图像进行分类。每张图像高和宽均是28像素。我们将图像中的像素逐行展开,得到长度为784的向量,并输入进全连接层中。然而,这种分类方法有一定的局限性。
- 图像在同一列邻近的像素在这个向量中可能相距较远。它们构成的模式可能难以被模型识别。
- 对于大尺寸的输入图像,使用全连接层容易造成模型过大。假设输入是高和宽均为1000像素的彩色照片(含3个通道)。即使全连接层输出个数仍是256,该层权重参数的形状是3,000,000×2563,000,000×2563,000,000×256:它占用了大约3 GB的内存或显存。这带来过复杂的模型和过高的存储开销。
卷积层尝试解决这两个问题。一方面,卷积层保留输入形状,使图像的像素在高和宽两个方向上的相关性均可能被有效识别;另一方面,卷积层通过滑动窗口将同一卷积核与不同位置的输入重复计算,从而避免参数尺寸过大。
卷积神经网络就是含卷积层的网络。本节里我们将介绍一个早期用来识别手写数字图像的卷积神经网络:LeNet [1]。这个名字来源于LeNet论文的第一作者Yann LeCun。LeNet展示了通过梯度下降训练卷积神经网络可以达到手写数字识别在当时最先进的结果。这个奠基性的工作第一次将卷积神经网络推上舞台,为世人所知。LeNet的网络结构如下图所示

LeNet模型
LeNet分为卷积层块和全连接层块两个部分。下面我们分别介绍这两个模块。
卷积层块里的基本单位是卷积层后接最大池化层:卷积层用来识别图像里的空间模式,如线条和物体局部,之后的最大池化层则用来降低卷积层对位置的敏感性。卷积层块由两个这样的基本单位重复堆叠构成。在卷积层块中,每个卷积层都使用5×5的窗口,并在输出上使用sigmoid激活函数。第一个卷积层输出通道数为6,第二个卷积层输出通道数则增加到16。这是因为第二个卷积层比第一个卷积层的输入的高和宽要小,所以增加输出通道使两个卷积层的参数尺寸类似。卷积层块的两个最大池化层的窗口形状均为2×2,且步幅为2。由于池化窗口与步幅形状相同,池化窗口在输入上每次滑动所覆盖的区域互不重叠。
卷积层块的输出形状为(批量大小, 通道, 高, 宽)。当卷积层块的输出传入全连接层块时,全连接层块会将小批量中每个样本变平(flatten)。也就是说,全连接层的输入形状将变成二维,其中第一维是小批量中的样本,第二维是每个样本变平后的向量表示,且向量长度为通道、高和宽的乘积。全连接层块含3个全连接层。它们的输出个数分别是120、84和10,其中10为输出的类别个数。
下面我们通过 Sequential类来实现LeNet模型
import time
import torch
from torch import nn, optim
import sys
sys.path.append("..")
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class LeNet(nn.Module):
def __init__(self):
super(LeNet, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(1, 6, 5), # in_channels, out_channels, kernel_size
nn.Sigmoid(),
nn.MaxPool2d(2, 2), # kernel_size, stride
nn.Conv2d(6, 16, 5),
nn.Sigmoid(),
nn.MaxPool2d(2, 2)
)
self.fc = nn.Sequential(
nn.Linear(16*4*4, 120),
nn.Sigmoid(),
nn.Linear(120, 84),
nn.Sigmoid(),
nn.Linear(84, 10)
)
def forward(self, img):
feature = self.conv(img)
output = self.fc(feature.view(img.shape[0], -1))
return output
'''接下来查看每个层的形状'''
net = LeNet()
print(net)
#output
LeNet(
(conv): Sequential(
(0): Conv2d(1, 6, kernel_size=(5, 5), stride=(1, 1))
(1): Sigmoid()
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(3): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1))
(4): Sigmoid()
(5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc): Sequential(
(0): Linear(in_features=256, out_features=120, bias=True)
(1): Sigmoid()
(2): Linear(in_features=120, out_features=84, bias=True)
(3): Sigmoid()
(4): Linear(in_features=84, out_features=10, bias=True)
)
)
可以看到,在卷积层块中输入的高和宽在逐层减小。卷积层由于使用高和宽均为5的卷积核,从而将高和宽分别减小4,而池化层则将高和宽减半,但通道数则从1增加到16。全连接层则逐层减少输出个数,直到变成图像的类别数10
获取数据和训练模型
下面我们来实验LeNet模型。实验中,我们仍然使用Fashion-MNIST作为训练数据集
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size=batch_size)
因为卷积神经网络计算比多层感知机要复杂,建议使用GPU来加速计算。因此,我们对3.6节(softmax回归的从零开始实现)中描述的 evaluate_accuracy函数略作修改,使其支持GPU计算
def evaluate_accuracy(data_iter, net, device=None):
if device is None and isinstance(net, torch.nn.Module):
# 如果没指定device就使用net的device
device = list(net.parameters())[0].device
acc_sum, n = 0.0, 0
with torch.no_grad():
for X, y in data_iter:
if isinstance(net, torch.nn.Module):
net.eval() # 评估模式, 这会关闭dropout
acc_sum += (net(X.to(device)).argmax(dim=1) == y.to(device)).float().sum().cpu().item()
net.train() # 改回训练模式
else: # 自定义的模型, 3.13节之后不会用到, 不考虑GPU
if('is_training' in net.__code__.co_varnames): # 如果有is_training这个参数
# 将is_training设置成False
acc_sum += (net(X, is_training=False).argmax(dim=1) == y).float().sum().item()
else:
acc_sum += (net(X).argmax(dim=1) == y).float().sum().item()
n += y.shape[0]
return acc_sum / n
我们同样对3.6节中定义的 train_ch3函数略作修改,确保计算使用的数据和模型同在内存或显存上。
def train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs):
net = net.to(device)
print("training on ", device)
loss = torch.nn.CrossEntropyLoss()
for epoch in range(num_epochs):
train_l_sum, train_acc_sum, n, batch_count, start = 0.0, 0.0, 0, 0, time.time()
for X, y in train_iter:
X = X.to(device)
y = y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
optimizer.zero_grad()
l.backward()
optimizer.step()
train_l_sum += l.cpu().item()
train_acc_sum += (y_hat.argmax(dim=1) == y).sum().cpu().item()
n += y.shape[0]
batch_count += 1
test_acc = evaluate_accuracy(test_iter, net)
print('epoch %d, loss %.4f, train acc %.3f, test acc %.3f, time %.1f sec'
% (epoch + 1, train_l_sum / batch_count, train_acc_sum / n, test_acc, time.time() - start))
学习率采用0.001,训练算法使用Adam算法,损失函数使用交叉熵损失函数
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
#output:
training on cpu
epoch 1, loss 1.7821, train acc 0.343, test acc 0.590, time 35.5 sec
epoch 2, loss 0.9482, train acc 0.633, test acc 0.698, time 20.6 sec
epoch 3, loss 0.7755, train acc 0.716, test acc 0.729, time 20.2 sec
epoch 4, loss 0.6910, train acc 0.741, test acc 0.746, time 20.7 sec
epoch 5, loss 0.6381, train acc 0.756, test acc 0.757, time 21.6 sec
完整代码
import time
import torch
from torch import nn, optim
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class LeNet(nn.Module):
def __init__(self):
super(LeNet, self).__init__()
self.conv = nn.Sequential( # 定义了一个名为conv的属性,这些层按顺序组成了LeNet的卷积部分
nn.Conv2d(1, 6, 5), # in_channels, out_channels, kernel_size
nn.Sigmoid(),
nn.MaxPool2d(2, 2), # kernel_size, stride 池化
nn.Conv2d(6, 16, 5),
nn.Sigmoid(),
nn.MaxPool2d(2, 2)
)
self.fc = nn.Sequential( # 定义多个全连接层。将卷积层提取的特征映射到最终的类别概率
nn.Linear(16*4*4, 120),
nn.Sigmoid(),
nn.Linear(120, 84),
nn.Sigmoid(),
nn.Linear(84, 10)
)
'''通过定义conv和fc这两个子模块,LeNet类将卷积和全连接部分组合在一起,形成了完整的LeNet卷积神经网络结构。
在前向传播函数中,输入数据经过卷积层和全连接层的处理,最终得到分类结果'''
def forward(self, img):
feature = self.conv(img)
output = self.fc(feature.view(img.shape[0], -1))
return output
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size=batch_size) # 加载Fashion MNIST数据集,返回训练集和测试集的迭代器
def evaluate_accuracy(data_iter, net, device=None):
if device is None and isinstance(net, torch.nn.Module):
# 如果没指定device就使用net的device
device = list(net.parameters())[0].device
acc_sum, n = 0.0, 0
with torch.no_grad():
for X, y in data_iter:
if isinstance(net, torch.nn.Module): # 用于检查net是否是torch.nn.Module类的实例
net.eval() # 评估模式, 这会关闭dropout
acc_sum += (net(X.to(device)).argmax(dim=1) == y.to(device)).float().sum().cpu().item()
net.train() # 改回训练模式
else: # 自定义的模型, 3.13节之后不会用到, 不考虑GPU
if('is_training' in net.__code__.co_varnames): # 如果有is_training这个参数
# 将is_training设置成False
acc_sum += (net(X, is_training=False).argmax(dim=1) == y).float().sum().item()
else:
acc_sum += (net(X).argmax(dim=1) == y).float().sum().item()
n += y.shape[0]
return acc_sum / n
def train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs):
net = net.to(device) # 将神经网络模型net移动到指定的设备device上进行计算
print("training on ", device)
loss = torch.nn.CrossEntropyLoss() # 定义交叉熵损失函数CrossEntropyLoss作为训练的损失函数
for epoch in range(num_epochs):
train_l_sum, train_acc_sum, n, batch_count, start = 0.0, 0.0, 0, 0, time.time()
for X, y in train_iter:
X = X.to(device)
y = y.to(device) # 将输入数据X和标签y移动到指定的设备device上进行计算
y_hat = net(X)
l = loss(y_hat, y)
optimizer.zero_grad()
l.backward()
optimizer.step() # 将优化器的梯度归零,然后进行反向传播计算梯度,并根据优化算法更新模型参数。
train_l_sum += l.cpu().item()
train_acc_sum += (y_hat.argmax(dim=1) == y).sum().cpu().item()
n += y.shape[0]
batch_count += 1
test_acc = evaluate_accuracy(test_iter, net)
print('epoch %d, loss %.4f, train acc %.3f, test acc %.3f, time %.1f sec'
% (epoch + 1, train_l_sum / batch_count, train_acc_sum / n, test_acc, time.time() - start))
net = LeNet()
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
深度卷积神经网络(AlexNet)
在LeNet提出后的将近20年里,神经网络一度被其他机器学习方法超越,如支持向量机。虽然LeNet可以在早期的小数据集上取得好的成绩,但是在更大的真实数据集上的表现并不尽如人意。一方面,神经网络计算复杂。虽然20世纪90年代也有过一些针对神经网络的加速硬件,但并没有像之后GPU那样大量普及。因此,训练一个多通道、多层和有大量参数的卷积神经网络在当年很难完成。另一方面,当年研究者还没有大量深入研究参数初始化和非凸优化算法等诸多领域,导致复杂的神经网络的训练通常较困难。
我们在上一节看到,神经网络可以直接基于图像的原始像素进行分类。这种称为端到端(end-to-end)的方法节省了很多中间步骤。然而,在很长一段时间里更流行的是研究者通过勤劳与智慧所设计并生成的手工特征。这类图像分类研究的主要流程是:
- 获取图像数据集;
- 使用已有的特征提取函数生成图像的特征;
- 使用机器学习模型对图像的特征分类。
当时认为的机器学习部分仅限最后这一步。如果那时候跟机器学习研究者交谈,他们会认为机器学习既重要又优美。优雅的定理证明了许多分类器的性质。机器学习领域生机勃勃、严谨而且极其有用。然而,如果跟计算机视觉研究者交谈,则是另外一幅景象。他们会告诉你图像识别里“不可告人”的现实是:计算机视觉流程中真正重要的是数据和特征。也就是说,使用较干净的数据集和较有效的特征甚至比机器学习模型的选择对图像分类结果的影响更大。
学习特征表示
既然特征如此重要,它该如何表示呢?
我们已经提到,在相当长的时间里,特征都是基于各式各样手工设计的函数从数据中提取的。事实上,不少研究者通过提出新的特征提取函数不断改进图像分类结果。这一度为计算机视觉的发展做出了重要贡献。
然而,另一些研究者则持异议。他们认为特征本身也应该由学习得来。他们还相信,为了表征足够复杂的输入,特征本身应该分级表示。持这一想法的研究者相信,多层神经网络可能可以学得数据的多级表征,并逐级表示越来越抽象的概念或模式。以图像分类为例,并回忆5.1节(二维卷积层)中物体边缘检测的例子。在多层神经网络中,图像的第一级的表示可以是在特定的位置和⻆度是否出现边缘;而第二级的表示说不定能够将这些边缘组合出有趣的模式,如花纹;在第三级的表示中,也许上一级的花纹能进一步汇合成对应物体特定部位的模式。这样逐级表示下去,最终,模型能够较容易根据最后一级的表示完成分类任务。需要强调的是,输入的逐级表示由多层模型中的参数决定,而这些参数都是学出来的。
尽管一直有一群执着的研究者不断钻研,试图学习视觉数据的逐级表征,然而很长一段时间里这些野心都未能实现。这其中有诸多因素值得我们一 一分析。
缺失要素一:数据
包含许多特征的深度模型需要大量的有标签的数据才能表现得比其他经典方法更好。限于早期计算机有限的存储和90年代有限的研究预算,大部分研究只基于小的公开数据集。例如,不少研究论文基于加州大学欧文分校(UCI)提供的若干个公开数据集,其中许多数据集只有几百至几千张图像。这一状况在2010年前后兴起的大数据浪潮中得到改善。特别是,2009年诞生的ImageNet数据集包含了1,000大类物体,每类有多达数千张不同的图像。这一规模是当时其他公开数据集无法与之相提并论的。ImageNet数据集同时推动计算机视觉和机器学习研究进入新的阶段,使此前的传统方法不再有优势。
缺失要素二:硬件
深度学习对计算资源要求很高。早期的硬件计算能力有限,这使训练较复杂的神经网络变得很困难。然而,通用GPU的到来改变了这一格局。很久以来,GPU都是为图像处理和计算机游戏设计的,尤其是针对大吞吐量的矩阵和向量乘法从而服务于基本的图形变换。值得庆幸的是,这其中的数学表达与深度网络中的卷积层的表达类似。通用GPU这个概念在2001年开始兴起,涌现出诸如OpenCL和CUDA之类的编程框架。这使得GPU也在2010年前后开始被机器学习社区使用。
AlexNet
2012年,AlexNet横空出世。这个模型的名字来源于论文第一作者的姓名Alex Krizhevsky [1]。AlexNet使用了8层卷积神经网络,并以很大的优势赢得了ImageNet 2012图像识别挑战赛。它首次证明了学习到的特征可以超越手工设计的特征,从而一举打破计算机视觉研究的前状
AlexNet与LeNet的设计理念非常相似,但也有显著的区别。
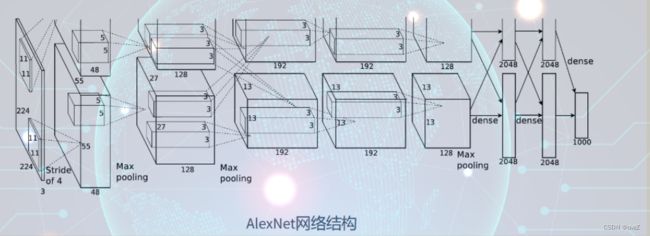
第一,与相对较小的LeNet相比,AlexNet包含8层变换,其中有5层卷积和2层全连接隐藏层,以及1个全连接输出层。下面我们来详细描述这些层的设计。
AlexNet第一层中的卷积窗口形状是11×11。因为ImageNet中绝大多数图像的高和宽均比MNIST图像的高和宽大10倍以上,ImageNet图像的物体占用更多的像素,所以需要更大的卷积窗口来捕获物体。第二层中的卷积窗口形状减小到5×5,之后全采用3×3。此外,第一、第二和第五个卷积层之后都使用了窗口形状为3×3、步幅为2的最大池化层。而且,AlexNet使用的卷积通道数也大于LeNet中的卷积通道数数十倍。
紧接着最后一个卷积层的是两个输出个数为4096的全连接层。这两个巨大的全连接层带来将近1 GB的模型参数。由于早期显存的限制,最早的AlexNet使用双数据流的设计使一个GPU只需要处理一半模型。幸运的是,显存在过去几年得到了长足的发展,因此通常我们不再需要这样的特别设计了。
第二,AlexNet将sigmoid激活函数改成了更加简单的ReLU激活函数。一方面,ReLU激活函数的计算更简单,例如它并没有sigmoid激活函数中的求幂运算。另一方面,ReLU激活函数在不同的参数初始化方法下使模型更容易训练。这是由于当sigmoid激活函数输出极接近0或1时,这些区域的梯度几乎为0,从而造成反向传播无法继续更新部分模型参数;而ReLU激活函数在正区间的梯度恒为1。因此,若模型参数初始化不当,sigmoid函数可能在正区间得到几乎为0的梯度,从而令模型无法得到有效训练。
第三,AlexNet通过丢弃法(参见3.13节)来控制全连接层的模型复杂度。而LeNet并没有使用丢弃法。
第四,AlexNet引入了大量的图像增广,如翻转、裁剪和颜色变化,从而进一步扩大数据集来缓解过拟合。我们将在后面的9.1节(图像增广)详细介绍这种方法。
下面我们实现稍微简化过的AlexNet。
import time
import torch
from torch import nn, optim
import torchvision
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class AlexNet(nn.Module):
def __init__(self):
super(AlexNet, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(1, 96, 11, 4), # in_channels, out_channels, kernel_size, stride, padding
nn.ReLU(),
nn.MaxPool2d(3, 2), # kernel_size, stride
# 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数
nn.Conv2d(96, 256, 5, 1, 2),
nn.ReLU(),
nn.MaxPool2d(3, 2),
# 连续3个卷积层,且使用更小的卷积窗口。除了最后的卷积层外,进一步增大了输出通道数。
# 前两个卷积层后不使用池化层来减小输入的高和宽
nn.Conv2d(256, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 256, 3, 1, 1),
nn.ReLU(),
nn.MaxPool2d(3, 2)
)
# 这里全连接层的输出个数比LeNet中的大数倍。使用丢弃层来缓解过拟合
self.fc = nn.Sequential(
nn.Linear(256*5*5, 4096),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(4096, 4096),
nn.ReLU(),
nn.Dropout(0.5),
# 输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000
nn.Linear(4096, 10),
)
def forward(self, img):
feature = self.conv(img)
output = self.fc(feature.view(img.shape[0], -1))
return output
打印看看网络结构
net = AlexNet()
print(net)
#output
AlexNet(
(conv): Sequential(
(0): Conv2d(1, 96, kernel_size=(11, 11), stride=(4, 4))
(1): ReLU()
(2): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(3): Conv2d(96, 256, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(4): ReLU()
(5): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Conv2d(256, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(7): ReLU()
(8): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(9): ReLU()
(10): Conv2d(384, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU()
(12): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc): Sequential(
(0): Linear(in_features=6400, out_features=4096, bias=True)
(1): ReLU()
(2): Dropout(p=0.5)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU()
(5): Dropout(p=0.5)
(6): Linear(in_features=4096, out_features=10, bias=True)
)
)
读取数据
虽然论文中AlexNet使用ImageNet数据集,但因为ImageNet数据集训练时间较长,我们仍用前面的Fashion-MNIST数据集来演示AlexNet。读取数据的时候我们额外做了一步将图像高和宽扩大到AlexNet使用的图像高和宽224。这个可以通过 torchvision.transforms.Resize实例来实现。也就是说,我们在 ToTensor实例前使用 Resize实例,然后使用 Compose实例来将这两个变换串联以方便调用
def load_data_fashion_mnist(batch_size, resize=None, root='~/Datasets/FashionMNIST'):
"""Download the fashion mnist dataset and then load into memory."""
trans = []
if resize:
trans.append(torchvision.transforms.Resize(size=resize))
trans.append(torchvision.transforms.ToTensor())
transform = torchvision.transforms.Compose(trans)
mnist_train = torchvision.datasets.FashionMNIST(root=root, train=True, download=True, transform=transform)
mnist_test = torchvision.datasets.FashionMNIST(root=root, train=False, download=True, transform=transform)
train_iter = torch.utils.data.DataLoader(mnist_train, batch_size=batch_size, shuffle=True, num_workers=4)
test_iter = torch.utils.data.DataLoader(mnist_test, batch_size=batch_size, shuffle=False, num_workers=4)
return train_iter, test_iter
batch_size = 128
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = load_data_fashion_mnist(batch_size, resize=224)
训练
这时候我们可以开始训练AlexNet了。相对于LeNet,由于图片尺寸变大了而且模型变大了,所以需要更大的显存,也需要更长的训练时间了
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
#output:
完整代码
import time
import torch
from torch import nn, optim
import torchvision
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class AlexNet(nn.Module):
def __init__(self):
super(AlexNet, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(1, 96, 11, 4), # in_channels, out_channels, kernel_size, stride, padding
nn.ReLU(),
nn.MaxPool2d(3, 2), # kernel_size, stride
# 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数
nn.Conv2d(96, 256, 5, 1, 2),
nn.ReLU(),
nn.MaxPool2d(3, 2),
# 连续3个卷积层,且使用更小的卷积窗口。除了最后的卷积层外,进一步增大了输出通道数。
# 前两个卷积层后不使用池化层来减小输入的高和宽
nn.Conv2d(256, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 256, 3, 1, 1),
nn.ReLU(),
nn.MaxPool2d(3, 2)
)
# 这里全连接层的输出个数比LeNet中的大数倍。使用丢弃层来缓解过拟合
self.fc = nn.Sequential(
nn.Linear(256*5*5, 4096),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(4096, 4096),
nn.ReLU(),
nn.Dropout(0.5),
# 输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000
nn.Linear(4096, 10),
)
def forward(self, img):
feature = self.conv(img)
output = self.fc(feature.view(img.shape[0], -1))
return output
net = AlexNet()
# print(net)
#def load_data_fashion_mnist:加载Fashion-MNIST数据集并返回数据迭代器,以便在训练模型时使用
def load_data_fashion_mnist(batch_size, resize=None, root='~/Datasets/FashionMNIST'): # batch_size(批量大小)、resize(可选的调整大小参数,默认为None)和root(数据集存储路径,默认为'~/Datasets/FashionMNIST')
"""Download the fashion mnist dataset and then load into memory."""''
trans = []
if resize: # 如果resize参数非空(即存在调整大小要求),则向trans列表中添加一个torchvision.transforms.Resize变换,将图像调整为指定大小。然后,将torchvision.transforms.ToTensor变换添加到trans列表中,将图像转换为Tensor格式
trans.append(torchvision.transforms.Resize(size=resize))
trans.append(torchvision.transforms.ToTensor())
transform = torchvision.transforms.Compose(trans) # 将trans列表中的变换组合成一个变换管道transform
mnist_train = torchvision.datasets.FashionMNIST(root=root, train=True, download=True, transform=transform)
mnist_test = torchvision.datasets.FashionMNIST(root=root, train=False, download=True, transform=transform) # 创建了两个数据集对象mnist_train和mnist_test,分别用于训练集和测试集
train_iter = torch.utils.data.DataLoader(mnist_train, batch_size=batch_size, shuffle=True, num_workers=0) #函数创建训练集和测试集的数据迭代器。DataLoader将mnist_train和mnist_test作为数据源,并设置了批量大小batch_size、
# 数据洗牌shuffle(在训练集中打乱顺序,而在测试集中保持顺序)和num_workers(用于加载数据的线程数,此处为0表示单进程加载)
test_iter = torch.utils.data.DataLoader(mnist_test, batch_size=batch_size, shuffle=False, num_workers=0) # num_worker=0: 在windows系统中需要将进程数设置为单进程
return train_iter, test_iter
batch_size = 128
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = load_data_fashion_mnist(batch_size, resize=224)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
使用重复元素的网络(VGG)
AlexNet在LeNet的基础上增加了3个卷积层。但AlexNet作者对它们的卷积窗口、输出通道数和构造顺序均做了大量的调整。虽然AlexNet指明了深度卷积神经网络可以取得出色的结果,但并没有提供简单的规则以指导后来的研究者如何设计新的网络。我们将在本章的后续几节里介绍几种不同的深度网络设计思路。
本节介绍VGG,它的名字来源于论文作者所在的实验室Visual Geometry Group [1]。VGG提出了可以通过重复使用简单的基础块来构建深度模型的思路
VGG块
VGG块的组成规律是:连续使用数个相同的填充为1、窗口形状为3×3的卷积层后接上一个步幅为2、窗口形状为2×2的最大池化层。卷积层保持输入的高和宽不变,而池化层则对其减半。我们使用 vgg_block函数来实现这个基础的VGG块,它可以指定卷积层的数量和输入输出通道数
对于给定的感受野(与输出有关的输入图片的局部大小),采用堆积的小卷积核优于采用大的卷积核,因为可以增加网络深度来保证学习更复杂的模式,而且代价还比较小(参数更少)。例如,在VGG中,使用了3个3x3卷积核来代替7x7卷积核,使用了2个3x3卷积核来代替5*5卷积核,这样做的主要目的是在保证具有相同感知野的条件下,提升了网络的深度,在一定程度上提升了神经网络的效果
import time
import torch
from torch import nn, optim
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
def vgg_block(num_convs, in_channels, out_channels):
blk = []
for i in range(num_convs):
if i == 0:
blk.append(nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1))
else:
blk.append(nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1))
blk.append(nn.ReLU())
blk.append(nn.MaxPool2d(kernel_size=2, stride=2)) # 这里会使宽高减半
return nn.Sequential(*blk)
VGG网络
与AlexNet和LeNet一样,VGG网络由卷积层模块后接全连接层模块构成。卷积层模块串联数个 vgg_block,其超参数由变量 conv_arch定义。该变量指定了每个VGG块里卷积层个数和输入输出通道数。全连接模块则跟AlexNet中的一样。
现在我们构造一个VGG网络。它有5个卷积块,前2块使用单卷积层,而后3块使用双卷积层。第一块的输入输出通道分别是1(因为下面要使用的Fashion-MNIST数据的通道数为1)和64,之后每次对输出通道数翻倍,直到变为512。因为这个网络使用了8个卷积层和3个全连接层,所以经常被称为VGG-11
conv_arch = ((1, 1, 64), (1, 64, 128), (2, 128, 256), (2, 256, 512), (2, 512, 512))
# 经过5个vgg_block, 宽高会减半5次, 变成 224/32 = 7
fc_features = 512 * 7 * 7 # c * w * h
fc_hidden_units = 4096 # 任意
下面我们实现VGG-11
def vgg(conv_arch, fc_features, fc_hidden_units=4096):
net = nn.Sequential()
# 卷积层部分
for i, (num_convs, in_channels, out_channels) in enumerate(conv_arch):
# 每经过一个vgg_block都会使宽高减半
net.add_module("vgg_block_" + str(i+1), vgg_block(num_convs, in_channels, out_channels))
# 全连接层部分
net.add_module("fc", nn.Sequential(d2l.FlattenLayer(),
nn.Linear(fc_features, fc_hidden_units),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(fc_hidden_units, fc_hidden_units),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(fc_hidden_units, 10)
))
return net
下面构造一个高和宽均为224的单通道数据样本来观察每一层的输出形状
net = vgg(conv_arch, fc_features, fc_hidden_units)
X = torch.rand(1, 1, 224, 224)
# named_children获取一级子模块及其名字(named_modules会返回所有子模块,包括子模块的子模块)
for name, blk in net.named_children():
X = blk(X)
print(name, 'output shape: ', X.shape)
#output:
vgg_block_1 output shape: torch.Size([1, 64, 112, 112])
vgg_block_2 output shape: torch.Size([1, 128, 56, 56])
vgg_block_3 output shape: torch.Size([1, 256, 28, 28])
vgg_block_4 output shape: torch.Size([1, 512, 14, 14])
vgg_block_5 output shape: torch.Size([1, 512, 7, 7])
fc output shape: torch.Size([1, 10])
可以看到,每次我们将输入的高和宽减半,直到最终高和宽变成7后传入全连接层。与此同时,输出通道数每次翻倍,直到变成512。因为每个卷积层的窗口大小一样,所以每层的模型参数尺寸和计算复杂度与输入高、输入宽、输入通道数和输出通道数的乘积成正比。VGG这种高和宽减半以及通道翻倍的设计使得多数卷积层都有相同的模型参数尺寸和计算复杂度
获取数据和训练模型
因为VGG-11计算上比AlexNet更加复杂,出于测试的目的我们构造一个通道数更小,或者说更窄的网络在Fashion-MNIST数据集上进行训练
ratio = 8
small_conv_arch = [(1, 1, 64//ratio), (1, 64//ratio, 128//ratio), (2, 128//ratio, 256//ratio),
(2, 256//ratio, 512//ratio), (2, 512//ratio, 512//ratio)]
net = vgg(small_conv_arch, fc_features // ratio, fc_hidden_units // ratio)
print(net)
#output
Sequential(
(vgg_block_1): Sequential(
(0): Conv2d(1, 8, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_2): Sequential(
(0): Conv2d(8, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_3): Sequential(
(0): Conv2d(16, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_4): Sequential(
(0): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_5): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc): Sequential(
(0): FlattenLayer()
(1): Linear(in_features=3136, out_features=512, bias=True)
(2): ReLU()
(3): Dropout(p=0.5)
(4): Linear(in_features=512, out_features=512, bias=True)
(5): ReLU()
(6): Dropout(p=0.5)
(7): Linear(in_features=512, out_features=10, bias=True)
)
)
模型训练过程与上一节的AlexNet中的类似
batch_size = 64
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
完整代码
import time
import torch
from torch import nn, optim
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
def vgg_block(num_convs, in_channels, out_channels): # 创建一个VGG块,它由多个卷积层和池化层组成
blk = []
for i in range(num_convs):
if i == 0:
blk.append(nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1)) # 将一个2D卷积层添加到blk列表中
else:
blk.append(nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1))
blk.append(nn.ReLU()) # 将一个ReLU激活函数添加到blk列表中
blk.append(nn.MaxPool2d(kernel_size=2, stride=2)) # 将一个最大池化层添加到blk列表中,这里会使宽高减半
return nn.Sequential(*blk)
conv_arch = ((1, 1, 64), (1, 64, 128), (2, 128, 256), (2, 256, 512), (2, 512, 512)) # 每个元素表示一个vgg_block的参数,包括卷积层数量、输入通道数和输出通道数
# 经过5个vgg_block, 宽高会减半5次, 变成 224/32 = 7
fc_features = 512 * 7 * 7 # c * w * h表示全连接层输入的特征数量
fc_hidden_units = 4096 # 表示全连接层中隐藏单元的数量
def vgg(conv_arch, fc_features, fc_hidden_units=4096): # 构建一个基于 VGG 网络结构的模型
net = nn.Sequential() # 创建一个空的Sequential容器
# 卷积层部分
for i, (num_convs, in_channels, out_channels) in enumerate(conv_arch): # 遍历 conv_arch 列表中的每个元素,根据每个元素的值调用 vgg_block 函数生成对应的 VGG 块,并将这些块添加到 net 容器中。
# 每经过一个vgg_block都会使宽高减半 # 在每次迭代中,enumerate() 函数会返回一个元组,其中第一个元素是索引 i,第二个元素是当前元素的值 (num_convs, in_channels, out_channels)
net.add_module("vgg_block_" + str(i+1), vgg_block(num_convs, in_channels, out_channels)) # 向net容器中添加一个模块,模块名称为"vgg_block_"加上索引i的字符串形式,模块的内容是调用vgg_block函数并传入相应的参数
# 全连接层部分
net.add_module("fc", nn.Sequential(d2l.FlattenLayer(),
nn.Linear(fc_features, fc_hidden_units),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(fc_hidden_units, fc_hidden_units),
nn.ReLU(),
nn.Dropout(0.5), # 添加一个丢弃层,丢弃概率为0.5
nn.Linear(fc_hidden_units, 10)
))
return net
net = vgg(conv_arch, fc_features, fc_hidden_units)
print(net)
X = torch.rand(1, 1, 224, 224)
# named_children获取一级子模块及其名字(named_modules会返回所有子模块,包括子模块的子模块)
for name, blk in net.named_children(): # 对net的每个子模块进行迭代,同时获取模块名称name和模块内容blk。
X = blk(X)
print(name, 'output shape: ', X.shape)
ratio = 8
small_conv_arch = [(1, 1, 64//ratio), (1, 64//ratio, 128//ratio), (2, 128//ratio, 256//ratio),
(2, 256//ratio, 512//ratio), (2, 512//ratio, 512//ratio)] # 定义了一个名为small_conv_arch的列表,其中包含5个元组,每个元组表示一个vgg_block的参数,与conv_arch类似,但通道数除以ratio
net = vgg(small_conv_arch, fc_features // ratio, fc_hidden_units // ratio)
#print(net)
batch_size = 64
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
# d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
网络中的网络(NiN)
前几节介绍的LeNet、AlexNet和VGG在设计上的共同之处是:先以由卷积层构成的模块充分抽取空间特征,再以由全连接层构成的模块来输出分类结果。其中,AlexNet和VGG对LeNet的改进主要在于如何对这两个模块加宽(增加通道数)和加深。本节我们介绍网络中的网络(NiN)[1]。它提出了另外一个思路,即串联多个由卷积层和“全连接”层构成的小网络来构建一个深层网络
NiN块
我们知道,卷积层的输入和输出通常是四维数组(样本,通道,高,宽),而全连接层的输入和输出则通常是二维数组(样本,特征)。如果想在全连接层后再接上卷积层,则需要将全连接层的输出变换为四维。回忆在5.3节(多输入通道和多输出通道)里介绍的1×1卷积层。它可以看成全连接层,其中空间维度(高和宽)上的每个元素相当于样本,通道相当于特征。因此,NiN使用1×1卷积层来替代全连接层,从而使空间信息能够自然传递到后面的层中去。图5.7对比了NiN同AlexNet和VGG等网络在结构上的主要区别。

NiN块是NiN中的基础块。它由一个卷积层加两个充当全连接层的1×1卷积层串联而成。其中第一个卷积层的超参数可以自行设置,而第二和第三个卷积层的超参数一般是固定的。
import time
import torch
from torch import nn, optim
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
def nin_block(in_channels, out_channels, kernel_size, stride, padding):
blk = nn.Sequential(nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU())
return blk
NiN模型
NiN是在AlexNet问世不久后提出的。它们的卷积层设定有类似之处。NiN使用卷积窗口形状分别为11×11、5×5和3×3的卷积层,相应的输出通道数也与AlexNet中的一致。每个NiN块后接一个步幅为2、窗口形状为3×3的最大池化层。
除使用NiN块以外,NiN还有一个设计与AlexNet显著不同:NiN去掉了AlexNet最后的3个全连接层,取而代之地,NiN使用了输出通道数等于标签类别数的NiN块,然后使用全局平均池化层对每个通道中所有元素求平均并直接用于分类。这里的全局平均池化层即窗口形状等于输入空间维形状的平均池化层。NiN的这个设计的好处是可以显著减小模型参数尺寸,从而缓解过拟合。然而,该设计有时会造成获得有效模型的训练时间的增加。
import torch.nn.functional as F
class GlobalAvgPool2d(nn.Module):
# 全局平均池化层可通过将池化窗口形状设置成输入的高和宽实现
def __init__(self):
super(GlobalAvgPool2d, self).__init__()
def forward(self, x):
return F.avg_pool2d(x, kernel_size=x.size()[2:])
net = nn.Sequential(
nin_block(1, 96, kernel_size=11, stride=4, padding=0),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(96, 256, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(256, 384, kernel_size=3, stride=1, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Dropout(0.5),
# 标签类别数是10
nin_block(384, 10, kernel_size=3, stride=1, padding=1),
GlobalAvgPool2d(),
# 将四维的输出转成二维的输出,其形状为(批量大小, 10)
d2l.FlattenLayer())
我们构建一个数据样本来查看每一层的输出形状
X = torch.rand(1, 1, 224, 224)
for name, blk in net.named_children():
X = blk(X)
print(name, 'output shape: ', X.shape)
#output:
0 output shape: torch.Size([1, 96, 54, 54])
1 output shape: torch.Size([1, 96, 26, 26])
2 output shape: torch.Size([1, 256, 26, 26])
3 output shape: torch.Size([1, 256, 12, 12])
4 output shape: torch.Size([1, 384, 12, 12])
5 output shape: torch.Size([1, 384, 5, 5])
6 output shape: torch.Size([1, 384, 5, 5])
7 output shape: torch.Size([1, 10, 5, 5])
8 output shape: torch.Size([1, 10, 1, 1])
9 output shape: torch.Size([1, 10])
获取数据和训练模型
我们依然使用Fashion-MNIST数据集来训练模型。NiN的训练与AlexNet和VGG的类似,但这里使用的学习率更大
batch_size = 128
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
lr, num_epochs = 0.002, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
#output
training on cuda
epoch 1, loss 1.9717, train acc 0.238, test acc 0.306, time 71.3 sec
epoch 2, loss 1.7292, train acc 0.364, test acc 0.405, time 63.4 sec
epoch 3, loss 1.6564, train acc 0.414, test acc 0.400, time 63.8 sec
epoch 4, loss 1.6229, train acc 0.411, test acc 0.386, time 63.7 sec
epoch 5, loss 1.5937, train acc 0.441, test acc 0.447, time 63.9 sec
完整代码
import time
import torch
from torch import nn, optim
import sys
import d2lzh_pytorch as d2l
import torch.nn.functional as F
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
def nin_block(in_channels, out_channels, kernel_size, stride, padding):
blk = nn.Sequential(nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU())
return blk
class GlobalAvgPool2d(nn.Module):
# 全局平均池化层可通过将池化窗口形状设置成输入的高和宽实现
def __init__(self):
super(GlobalAvgPool2d, self).__init__()
def forward(self, x):
return F.avg_pool2d(x, kernel_size=x.size()[2:])
net = nn.Sequential(
nin_block(1, 96, kernel_size=11, stride=4, padding=0),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(96, 256, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(256, 384, kernel_size=3, stride=1, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Dropout(0.5),
# 标签类别数是10
nin_block(384, 10, kernel_size=3, stride=1, padding=1),
GlobalAvgPool2d(),
# 将四维的输出转成二维的输出,其形状为(批量大小, 10)
d2l.FlattenLayer())
X = torch.rand(1, 1, 224, 224)
for name, blk in net.named_children():
X = blk(X)
print(name, 'output shape: ', X.shape)
batch_size = 128
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
lr, num_epochs = 0.002, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
含并行连结的网络(GoogLeNet)
在2014年的ImageNet图像识别挑战赛中,一个名叫GoogLeNet的网络结构大放异彩 [1]。它虽然在名字上向LeNet致敬,但在网络结构上已经很难看到LeNet的影子。GoogLeNet吸收了NiN中网络串联网络的思想,并在此基础上做了很大改进。在随后的几年里,研究人员对GoogLeNet进行了数次改进,本节将介绍这个模型系列的第一个版本
Inception 块
GoogLeNet中的基础卷积块叫作Inception块,得名于同名电影《盗梦空间》(Inception)。与上一节介绍的NiN块相比,这个基础块在结构上更加复杂,如图5.8所示。

由图5.8可以看出,Inception块里有4条并行的线路。前3条线路使用窗口大小分别是1×1、3×3和5×5的卷积层来抽取不同空间尺寸下的信息,其中中间2个线路会对输入先做1×1卷积来减少输入通道数,以降低模型复杂度。第四条线路则使用3×3最大池化层,后接1×1卷积层来改变通道数。4条线路都使用了合适的填充来使输入与输出的高和宽一致。最后我们将每条线路的输出在通道维上连结,并输入接下来的层中去。
Inception块中可以自定义的超参数是每个层的输出通道数,我们以此来控制模型复杂度。
import time
import torch
from torch import nn, optim
import torch.nn.functional as F
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class Inception(nn.Module):
# c1 - c4为每条线路里的层的输出通道数
def __init__(self, in_c, c1, c2, c3, c4):
super(Inception, self).__init__()
# 线路1,单1 x 1卷积层
self.p1_1 = nn.Conv2d(in_c, c1, kernel_size=1)
# 线路2,1 x 1卷积层后接3 x 3卷积层
self.p2_1 = nn.Conv2d(in_c, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# 线路3,1 x 1卷积层后接5 x 5卷积层
self.p3_1 = nn.Conv2d(in_c, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# 线路4,3 x 3最大池化层后接1 x 1卷积层
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_c, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
return torch.cat((p1, p2, p3, p4), dim=1) # 在通道维上连结输出
GoogLeNet模型
GoogLeNet跟VGG一样,在主体卷积部分中使用5个模块(block),每个模块之间使用步幅为2的3×3最大池化层来减小输出高宽。第一模块使用一个64通道的7×7卷积层
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
第二模块使用2个卷积层:首先是64通道的1×1卷积层,然后是将通道增大3倍的3×3卷积层。它对应Inception块中的第二条线路。
b2 = nn.Sequential(nn.Conv2d(64, 64, kernel_size=1),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))

b3 = nn.Sequential(Inception(192, 64, (96, 128), (16, 32), 32),
Inception(256, 128, (128, 192), (32, 96), 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b4 = nn.Sequential(Inception(480, 192, (96, 208), (16, 48), 64),
Inception(512, 160, (112, 224), (24, 64), 64),
Inception(512, 128, (128, 256), (24, 64), 64),
Inception(512, 112, (144, 288), (32, 64), 64),
Inception(528, 256, (160, 320), (32, 128), 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b5 = nn.Sequential(Inception(832, 256, (160, 320), (32, 128), 128),
Inception(832, 384, (192, 384), (48, 128), 128),
d2l.GlobalAvgPool2d())
GoogLeNet模型的计算复杂,而且不如VGG那样便于修改通道数。本节里我们将输入的高和宽从224降到96来简化计算。下面演示各个模块之间的输出的形状变化
net = nn.Sequential(b1, b2, b3, b4, b5, d2l.FlattenLayer(), nn.Linear(1024, 10))
X = torch.rand(1, 1, 96, 96)
for blk in net.children():
X = blk(X)
print('output shape: ', X.shape)
#output:
output shape: torch.Size([1, 64, 24, 24])
output shape: torch.Size([1, 192, 12, 12])
output shape: torch.Size([1, 480, 6, 6])
output shape: torch.Size([1, 832, 3, 3])
output shape: torch.Size([1, 1024, 1, 1])
output shape: torch.Size([1, 1024])
output shape: torch.Size([1, 10])
获取数据和训练模型
我们使用高和宽均为96像素的图像来训练GoogLeNet模型。训练使用的图像依然来自Fashion-MNIST数据集
batch_size = 128
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
#output:
epoch 1, loss 1.0389, train acc 0.594, test acc 0.746, time 53.3 sec
epoch 2, loss 0.4283, train acc 0.841, test acc 0.843, time 46.0 sec
epoch 3, loss 0.3430, train acc 0.869, test acc 0.869, time 45.6 sec
epoch 4, loss 0.3041, train acc 0.885, test acc 0.881, time 47.2 sec
epoch 5, loss 0.2805, train acc 0.895, test acc 0.886, time 48.6 sec
完整代码
import time
import torch
from torch import nn, optim
import torch.nn.functional as F
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class Inception(nn.Module):
# c1 - c4为每条线路里的层的输出通道数
def __init__(self, in_c, c1, c2, c3, c4):
super(Inception, self).__init__()
# 线路1,单1 x 1卷积层
self.p1_1 = nn.Conv2d(in_c, c1, kernel_size=1)
# 线路2,1 x 1卷积层后接3 x 3卷积层
self.p2_1 = nn.Conv2d(in_c, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# 线路3,1 x 1卷积层后接5 x 5卷积层
self.p3_1 = nn.Conv2d(in_c, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# 线路4,3 x 3最大池化层后接1 x 1卷积层
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_c, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
return torch.cat((p1, p2, p3, p4), dim=1) # 在通道维上连结输出
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b2 = nn.Sequential(nn.Conv2d(64, 64, kernel_size=1),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b3 = nn.Sequential(Inception(192, 64, (96, 128), (16, 32), 32),
Inception(256, 128, (128, 192), (32, 96), 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b4 = nn.Sequential(Inception(480, 192, (96, 208), (16, 48), 64),
Inception(512, 160, (112, 224), (24, 64), 64),
Inception(512, 128, (128, 256), (24, 64), 64),
Inception(512, 112, (144, 288), (32, 64), 64),
Inception(528, 256, (160, 320), (32, 128), 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b5 = nn.Sequential(Inception(832, 256, (160, 320), (32, 128), 128),
Inception(832, 384, (192, 384), (48, 128), 128),
d2l.GlobalAvgPool2d())
net = nn.Sequential(b1, b2, b3, b4, b5,
d2l.FlattenLayer(), nn.Linear(1024, 10))
X = torch.rand(1, 1, 96, 96)
for blk in net.children():
X = blk(X)
print('output shape: ', X.shape)
batch_size = 128
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
批量归一化
本节我们介绍批量归一化(batch normalization)层,它能让较深的神经网络的训练变得更加容易 [1]。在3.16节(实战Kaggle比赛:预测房价)里,我们对输入数据做了标准化处理:处理后的任意一个特征在数据集中所有样本上的均值为0、标准差为1。标准化处理输入数据使各个特征的分布相近:这往往更容易训练出有效的模型。
通常来说,数据标准化预处理对于浅层模型就足够有效了。随着模型训练的进行,当每层中参数更新时,靠近输出层的输出较难出现剧烈变化。但对深层神经网络来说,即使输入数据已做标准化,训练中模型参数的更新依然很容易造成靠近输出层输出的剧烈变化。这种计算数值的不稳定性通常令我们难以训练出有效的深度模型。
批量归一化的提出正是为了应对深度模型训练的挑战。在模型训练时,批量归一化利用小批量上的均值和标准差,不断调整神经网络中间输出,从而使整个神经网络在各层的中间输出的数值更稳定。 批量归一化和下一节将要介绍的残差网络为训练和设计深度模型提供了两类重要思路 。
批量归一化层
对全连接层和卷积层做批量归一化的方法稍有不同。下面我们将分别介绍这两种情况下的批量归一化
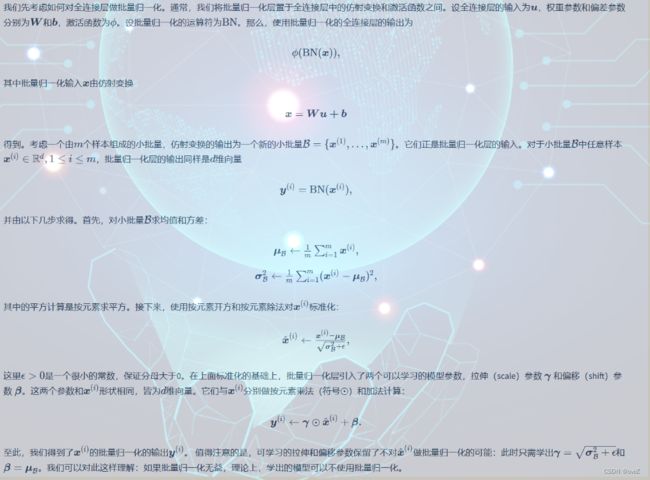
对全连接层做批量归一化
对卷积层做批量归一化
对卷积层来说,批量归一化发生在卷积计算之后、应用激活函数之前。如果卷积计算输出多个通道,我们需要对这些通道的输出分别做批量归一化,且 每个通道都拥有独立的拉伸和偏移参数,并均为标量 。设小批量中有m个样本。在单个通道上,假设卷积计算输出的高和宽分别为p和q。我们需要对该通道中m×p×q个元素同时做批量归一化。对这些元素做标准化计算时,我们使用相同的均值和方差,即该通道中m×p×q个元素的均值和方差。
预测时的批量归一化
使用批量归一化训练时,我们可以将批量大小设得大一点,从而使批量内样本的均值和方差的计算都较为准确。将训练好的模型用于预测时,我们希望模型对于任意输入都有确定的输出。因此,单个样本的输出不应取决于批量归一化所需要的随机小批量中的均值和方差。一种常用的方法是通过移动平均估算整个训练数据集的样本均值和方差,并在预测时使用它们得到确定的输出。可见,和丢弃层一样,批量归一化层在训练模式和预测模式下的计算结果也是不一样的
从零开始实现
下面我们自己实现批量归一化层
import time
import torch
from torch import nn, optim
import torch.nn.functional as F
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
def batch_norm(is_training, X, gamma, beta, moving_mean, moving_var, eps, momentum):
# 判断当前模式是训练模式还是预测模式
if not is_training:
# 如果是在预测模式下,直接使用传入的移动平均所得的均值和方差
X_hat = (X - moving_mean) / torch.sqrt(moving_var + eps)
else:
assert len(X.shape) in (2, 4)
if len(X.shape) == 2:
# 使用全连接层的情况,计算特征维上的均值和方差
mean = X.mean(dim=0)
var = ((X - mean) ** 2).mean(dim=0)
else:
# 使用二维卷积层的情况,计算通道维上(axis=1)的均值和方差。这里我们需要保持
# X的形状以便后面可以做广播运算
mean = X.mean(dim=0, keepdim=True).mean(dim=2, keepdim=True).mean(dim=3, keepdim=True)
var = ((X - mean) ** 2).mean(dim=0, keepdim=True).mean(dim=2, keepdim=True).mean(dim=3, keepdim=True)
# 训练模式下用当前的均值和方差做标准化
X_hat = (X - mean) / torch.sqrt(var + eps)
# 更新移动平均的均值和方差
moving_mean = momentum * moving_mean + (1.0 - momentum) * mean
moving_var = momentum * moving_var + (1.0 - momentum) * var
Y = gamma * X_hat + beta # 拉伸和偏移
return Y, moving_mean, moving_var
接下来,我们自定义一个 BatchNorm层。它保存参与求梯度和迭代的拉伸参数 gamma和偏移参数 beta,同时也维护移动平均得到的均值和方差,以便能够在模型预测时被使用。BatchNorm实例所需指定的 num_features参数对于全连接层来说应为输出个数,对于卷积层来说则为输出通道数。该实例所需指定的 num_dims参数对于全连接层和卷积层来说分别为2和4。
class BatchNorm(nn.Module):
def __init__(self, num_features, num_dims):
super(BatchNorm, self).__init__()
if num_dims == 2:
shape = (1, num_features)
else:
shape = (1, num_features, 1, 1)
# 参与求梯度和迭代的拉伸和偏移参数,分别初始化成0和1
self.gamma = nn.Parameter(torch.ones(shape))
self.beta = nn.Parameter(torch.zeros(shape))
# 不参与求梯度和迭代的变量,全在内存上初始化成0
self.moving_mean = torch.zeros(shape)
self.moving_var = torch.zeros(shape)
def forward(self, X):
# 如果X不在内存上,将moving_mean和moving_var复制到X所在显存上
if self.moving_mean.device != X.device:
self.moving_mean = self.moving_mean.to(X.device)
self.moving_var = self.moving_var.to(X.device)
# 保存更新过的moving_mean和moving_var, Module实例的traning属性默认为true, 调用.eval()后设成false
Y, self.moving_mean, self.moving_var = batch_norm(self.training,
X, self.gamma, self.beta, self.moving_mean,
self.moving_var, eps=1e-5, momentum=0.9)
return Y
下面我们修改5.5节(卷积神经网络(LeNet))介绍的LeNet模型,从而应用批量归一化层。我们在所有的卷积层或全连接层之后、激活层之前加入批量归一化层
net = nn.Sequential(
nn.Conv2d(1, 6, 5), # in_channels, out_channels, kernel_size
BatchNorm(6, num_dims=4),
nn.Sigmoid(),
nn.MaxPool2d(2, 2), # kernel_size, stride
nn.Conv2d(6, 16, 5),
BatchNorm(16, num_dims=4),
nn.Sigmoid(),
nn.MaxPool2d(2, 2),
d2l.FlattenLayer(),
nn.Linear(16*4*4, 120),
BatchNorm(120, num_dims=2),
nn.Sigmoid(),
nn.Linear(120, 84),
BatchNorm(84, num_dims=2),
nn.Sigmoid(),
nn.Linear(84, 10)
)
下面我们训练修改后的模型
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size=batch_size)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
#output:
training on cuda
epoch 1, loss 0.0039, train acc 0.790, test acc 0.835, time 2.9 sec
epoch 2, loss 0.0018, train acc 0.866, test acc 0.821, time 3.2 sec
epoch 3, loss 0.0014, train acc 0.879, test acc 0.857, time 2.6 sec
epoch 4, loss 0.0013, train acc 0.886, test acc 0.820, time 2.7 sec
epoch 5, loss 0.0012, train acc 0.891, test acc 0.859, time 2.8 sec
最后我们查看第一个批量归一化层学习到的拉伸参数 gamma和偏移参数 beta
print(net[1].gamma.view((-1,)), net[1].beta.view((-1,)))
#output:
(tensor([ 1.2537, 1.2284, 1.0100, 1.0171, 0.9809, 1.1870], device='cuda:0'),
tensor([ 0.0962, 0.3299, -0.5506, 0.1522, -0.1556, 0.2240], device='cuda:0'))
完整代码
import time
import torch
from torch import nn, optim
import torch.nn.functional as F
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
def batch_norm(is_training, X, gamma, beta, moving_mean, moving_var, eps, momentum):
# is_training:一个布尔值,指示当前模式是否为训练模式。
# X:输入数据,可以是2D或4D的张量。
# gamma:拉伸参数,用于缩放批归一化后的数据。
# beta:偏移参数,用于偏移批归一化后的数据。
# moving_mean:移动平均的均值,用于在预测模式下标准化数据。
# moving_var:移动平均的方差,用于在预测模式下标准化数据。
# eps:一个小的常数,用于数值稳定性,避免除以零。
# momentum:移动平均的动量
# 判断当前模式是训练模式还是预测模式
if not is_training:
# 如果是在预测模式下,直接使用传入的移动平均值和方差来标准化数据
X_hat = (X - moving_mean) / torch.sqrt(moving_var + eps)
else: # 如果当前是训练模式,则根据输入数据的维度计算均值和方差
assert len(X.shape) in (2, 4)
if len(X.shape) == 2: # 如果X是一个2D的张量(全连接层的情况),则计算特征维度上的均值和方差。
mean = X.mean(dim=0)
var = ((X - mean) ** 2).mean(dim=0)
else:
# 使用二维卷积层的情况,计算通道维上(axis=1)的均值和方差。这里我们需要保持X的形状以便后面可以做广播运算
mean = X.mean(dim=0, keepdim=True).mean(dim=2, keepdim=True).mean(dim=3, keepdim=True)
var = ((X - mean) ** 2).mean(dim=0, keepdim=True).mean(dim=2, keepdim=True).mean(dim=3, keepdim=True)
# 训练模式下用当前的均值和方差做标准化
X_hat = (X - mean) / torch.sqrt(var + eps) # 在训练模式下,使用当前的均值和方差对输入数据进行标准化,得到X_hat
# 更新移动平均的均值和方差,用于在预测模式下标准化数据
moving_mean = momentum * moving_mean + (1.0 - momentum) * mean
moving_var = momentum * moving_var + (1.0 - momentum) * var
Y = gamma * X_hat + beta # 拉伸和偏移
return Y, moving_mean, moving_var
class BatchNorm(nn.Module):
def __init__(self, num_features, num_dims): # num_features:输入数据的特征数,num_dims:输入数据的维度。
super(BatchNorm, self).__init__()
if num_dims == 2: # 根据num_dims的值,确定shape的形状
shape = (1, num_features)
else:
shape = (1, num_features, 1, 1)
# 参与求梯度和迭代的拉伸和偏移参数,分别初始化成0和1
self.gamma = nn.Parameter(torch.ones(shape))
self.beta = nn.Parameter(torch.zeros(shape))
# 不参与求梯度和迭代的变量,全在内存上初始化成0
self.moving_mean = torch.zeros(shape)
self.moving_var = torch.zeros(shape)
def forward(self, X):
# 如果X不在内存上,将moving_mean和moving_var复制到X所在显存上
if self.moving_mean.device != X.device:
self.moving_mean = self.moving_mean.to(X.device)
self.moving_var = self.moving_var.to(X.device)
# 保存更新过的moving_mean和moving_var, Module实例的traning属性默认为true, 调用.eval()后设成false
Y, self.moving_mean, self.moving_var = batch_norm(self.training,
X, self.gamma, self.beta, self.moving_mean,
self.moving_var, eps=1e-5, momentum=0.9) # 批归一化操作
return Y
net = nn.Sequential(
nn.Conv2d(1, 6, 5), # in_channels, out_channels, kernel_size
BatchNorm(6, num_dims=4),
nn.Sigmoid(),
nn.MaxPool2d(2, 2), # kernel_size, stride
nn.Conv2d(6, 16, 5),
BatchNorm(16, num_dims=4),
nn.Sigmoid(),
nn.MaxPool2d(2, 2),
d2l.FlattenLayer(),
nn.Linear(16*4*4, 120),
BatchNorm(120, num_dims=2),
nn.Sigmoid(),
nn.Linear(120, 84),
BatchNorm(84, num_dims=2),
nn.Sigmoid(),
nn.Linear(84, 10)
)
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size=batch_size)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
print(net[1].gamma.view((-1,)), net[1].beta.view((-1,)))
简洁实现
与我们刚刚自己定义的 BatchNorm类相比,Pytorch中 nn模块定义的 BatchNorm1d和 BatchNorm2d类使用起来更加简单,二者分别用于全连接层和卷积层,都需要指定输入的 num_features参数值。下面我们用PyTorch实现使用批量归一化的LeNet。
net = nn.Sequential(
nn.Conv2d(1, 6, 5), # in_channels, out_channels, kernel_size
nn.BatchNorm2d(6),
nn.Sigmoid(),
nn.MaxPool2d(2, 2), # kernel_size, stride
nn.Conv2d(6, 16, 5),
nn.BatchNorm2d(16),
nn.Sigmoid(),
nn.MaxPool2d(2, 2),
d2l.FlattenLayer(),
nn.Linear(16*4*4, 120),
nn.BatchNorm1d(120),
nn.Sigmoid(),
nn.Linear(120, 84),
nn.BatchNorm1d(84),
nn.Sigmoid(),
nn.Linear(84, 10)
)
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size=batch_size)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
残差网络(ResNet)
让我们先思考一个问题:对神经网络模型添加新的层,充分训练后的模型是否只可能更有效地降低训练误差?理论上,原模型解的空间只是新模型解的空间的子空间。也就是说,如果我们能将新添加的层训练成恒等映射f(x)=x,新模型和原模型将同样有效。由于新模型可能得出更优的解来拟合训练数据集,因此添加层似乎更容易降低训练误差。然而在实践中,添加过多的层后训练误差往往不降反升。即使利用批量归一化带来的数值稳定性使训练深层模型更加容易,该问题仍然存在。针对这一问题,何恺明等人提出了残差网络(ResNet) [1]。它在2015年的ImageNet图像识别挑战赛夺魁,并深刻影响了后来的深度神经网络的设计。
残差块
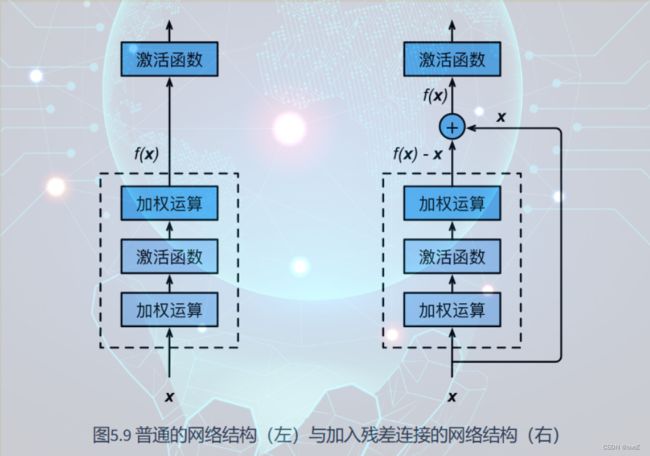
让我们聚焦于神经网络局部。如图5.9所示,设输入为x。假设我们希望学出的理想映射为f(x),从而作为图5.9上方激活函数的输入。左图虚线框中的部分需要直接拟合出该映射f(x),而右图虚线框中的部分则需要拟合出有关恒等映射的残差映射f(x)−x***。残差映射在实际中往往更容易优化。以本节开头提到的恒等映射作为我们希望学出的理想映射f(x)。我们只需将图5.9中右图虚线框内上方的加权运算(如仿射)的权重和偏差参数学成0,那么f(x)即为恒等映射。实际中,当理想映射f*(x)极接近于恒等映射时,残差映射也易于捕捉恒等映射的细微波动。图5.9右图也是ResNet的基础块,即残差块(residual block)。在残差块中,输入可通过跨层的数据线路更快地向前传播。
ResNet沿用了VGG全3×3卷积层的设计。残差块里首先有2个有相同输出通道数的3×3卷积层。每个卷积层后接一个批量归一化层和ReLU激活函数。然后我们将输入跳过这两个卷积运算后直接加在最后的ReLU激活函数前。这样的设计要求两个卷积层的输出与输入形状一样,从而可以相加。如果想改变通道数,就需要引入一个额外的1×1卷积层来将输入变换成需要的形状后再做相加运算。
残差块的实现如下。它可以设定输出通道数、是否使用额外的1×1卷积层来修改通道数以及卷积层的步幅。
import time
import torch
from torch import nn, optim
import torch.nn.functional as F
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class Residual(nn.Module):
def __init__(self, in_channels, out_channels, use_1x1conv=False, stride=1):
super(Residual, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1, stride=stride)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(out_channels)
self.bn2 = nn.BatchNorm2d(out_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
return F.relu(Y + X)
下面我们来查看输入和输出形状一致的情况。
blk = Residual(3, 3)
X = torch.rand((4, 3, 6, 6))
print(blk(X).shape) # torch.Size([4, 3, 6, 6])
我们也可以在增加输出通道数的同时减半输出的高和宽
blk = Residual(3, 6, use_1x1conv=True, stride=2)
print(blk(X).shape) # torch.Size([4, 6, 3, 3])
ResNet模型
ResNet的前两层跟之前介绍的GoogLeNet中的一样:在输出通道数为64、步幅为2的7×7卷积层后接步幅为2的3×3的最大池化层。不同之处在于ResNet每个卷积层后增加的批量归一化层
net = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
GoogLeNet在后面接了4个由Inception块组成的模块。ResNet则使用4个由残差块组成的模块,每个模块使用若干个同样输出通道数的残差块。第一个模块的通道数同输入通道数一致。由于之前已经使用了步幅为2的最大池化层,所以无须减小高和宽。之后的每个模块在第一个残差块里将上一个模块的通道数翻倍,并将高和宽减半。
下面我们来实现这个模块。注意,这里对第一个模块做了特别处理。
def resnet_block(in_channels, out_channels, num_residuals, first_block=False):
if first_block:
assert in_channels == out_channels # 第一个模块的通道数同输入通道数一致
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(in_channels, out_channels, use_1x1conv=True, stride=2))
else:
blk.append(Residual(out_channels, out_channels))
return nn.Sequential(*blk)
接着我们为ResNet加入所有残差块。这里每个模块使用两个残差块
net.add_module("resnet_block1", resnet_block(64, 64, 2, first_block=True))
net.add_module("resnet_block2", resnet_block(64, 128, 2))
net.add_module("resnet_block3", resnet_block(128, 256, 2))
net.add_module("resnet_block4", resnet_block(256, 512, 2))
最后,与GoogLeNet一样,加入全局平均池化层后接上全连接层输出
net.add_module("global_avg_pool", d2l.GlobalAvgPool2d()) # GlobalAvgPool2d的输出: (Batch, 512, 1, 1)
net.add_module("fc", nn.Sequential(d2l.FlattenLayer(), nn.Linear(512, 10)))
这里每个模块里有4个卷积层(不计算1×1卷积层),加上最开始的卷积层和最后的全连接层,共计18层。这个模型通常也被称为ResNet-18。通过配置不同的通道数和模块里的残差块数可以得到不同的ResNet模型,例如更深的含152层的ResNet-152。虽然ResNet的主体架构跟GoogLeNet的类似,但ResNet结构更简单,修改也更方便。这些因素都导致了ResNet迅速被广泛使用。
在训练ResNet之前,我们来观察一下输入形状在ResNet不同模块之间的变化。
X = torch.rand((1, 1, 224, 224))
for name, layer in net.named_children():
X = layer(X)
print(name, ' output shape:\t', X.shape)
#output
0 output shape: torch.Size([1, 64, 112, 112])
1 output shape: torch.Size([1, 64, 112, 112])
2 output shape: torch.Size([1, 64, 112, 112])
3 output shape: torch.Size([1, 64, 56, 56])
resnet_block1 output shape: torch.Size([1, 64, 56, 56])
resnet_block2 output shape: torch.Size([1, 128, 28, 28])
resnet_block3 output shape: torch.Size([1, 256, 14, 14])
resnet_block4 output shape: torch.Size([1, 512, 7, 7])
global_avg_pool output shape: torch.Size([1, 512, 1, 1])
fc output shape: torch.Size([1, 10])
获取数据和训练模型
batch_size = 256
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
完整代码
import time
import torch
from torch import nn, optim
import torch.nn.functional as F
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class Residual(nn.Module):
def __init__(self, in_channels, out_channels, use_1x1conv=False, stride=1):
super(Residual, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1, stride=stride)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(out_channels)
self.bn2 = nn.BatchNorm2d(out_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
return F.relu(Y + X)
net = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
def resnet_block(in_channels, out_channels, num_residuals, first_block=False):
if first_block:
assert in_channels == out_channels # 第一个模块的通道数同输入通道数一致
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(in_channels, out_channels, use_1x1conv=True, stride=2))
else:
blk.append(Residual(out_channels, out_channels))
return nn.Sequential(*blk)
net.add_module("resnet_block1", resnet_block(64, 64, 2, first_block=True))
net.add_module("resnet_block2", resnet_block(64, 128, 2))
net.add_module("resnet_block3", resnet_block(128, 256, 2))
net.add_module("resnet_block4", resnet_block(256, 512, 2))
net.add_module("global_avg_pool", d2l.GlobalAvgPool2d()) # GlobalAvgPool2d的输出: (Batch, 512, 1, 1)
net.add_module("fc", nn.Sequential(d2l.FlattenLayer(), nn.Linear(512, 10)))
# print(net)
X = torch.rand((1, 1, 224, 224))
# for name, layer in net.named_children():
# X = layer(X)
# print(name, ' output shape:\t', X.shape)
batch_size = 256
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
稠密连接网络(DenseNet)
ResNet中的跨层连接设计引申出了数个后续工作。本节我们介绍其中的一个:稠密连接网络(DenseNet) [1]。 它与ResNet的主要区别如图5.10所示。
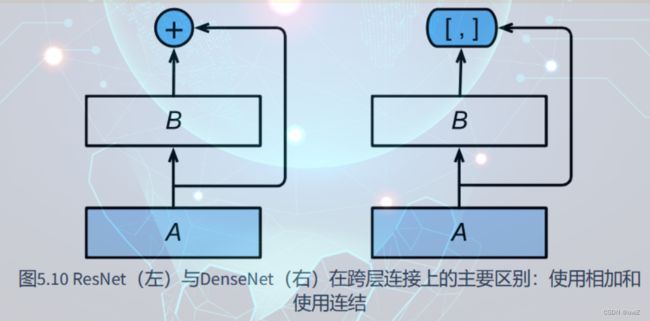
图5.10中将部分前后相邻的运算抽象为模块A和模块B。与ResNet的主要区别在于,DenseNet里模块B的输出不是像ResNet那样和模块A的输出相加,而是在通道维上连结。这样模块A的输出可以直接传入模块B后面的层。在这个设计里,模块A直接跟模块B后面的所有层连接在了一起。这也是它被称为“稠密连接”的原因。
DenseNet的主要构建模块是稠密块(dense block)和过渡层(transition layer)。前者定义了输入和输出是如何连结的,后者则用来控制通道数,使之不过大。
稠密块
DenseNet使用了ResNet改良版的“批量归一化、激活和卷积”结构,我们首先在 conv_block函数里实现这个结构。
import time
import torch
from torch import nn, optim
import torch.nn.functional as F
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
def conv_block(in_channels, out_channels):
blk = nn.Sequential(nn.BatchNorm2d(in_channels),
nn.ReLU(),
nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1))
return blk
稠密块由多个 conv_block组成,每块使用相同的输出通道数。但在前向计算时,我们将每块的输入和输出在通道维上连结
class DenseBlock(nn.Module):
def __init__(self, num_convs, in_channels, out_channels):
super(DenseBlock, self).__init__()
net = []
for i in range(num_convs):
in_c = in_channels + i * out_channels
net.append(conv_block(in_c, out_channels))
self.net = nn.ModuleList(net)
self.out_channels = in_channels + num_convs * out_channels # 计算输出通道数
def forward(self, X):
for blk in self.net:
Y = blk(X)
X = torch.cat((X, Y), dim=1) # 在通道维上将输入和输出连结
return X
在下面的例子中,我们定义一个有2个输出通道数为10的卷积块。使用通道数为3的输入时,我们会得到通道数为3+2×10=23的输出。卷积块的通道数控制了输出通道数相对于输入通道数的增长,因此也被称为增长率(growth rate)。
blk = DenseBlock(2, 3, 10)
X = torch.rand(4, 3, 8, 8)
Y = blk(X)
print(Y.shape) # torch.Size([4, 23, 8, 8])
过渡层
由于每个稠密块都会带来通道数的增加,使用过多则会带来过于复杂的模型。过渡层用来控制模型复杂度。它通过1×11×11×1卷积层来减小通道数,并使用步幅为2的平均池化层减半高和宽,从而进一步降低模型复杂度。
def transition_block(in_channels, out_channels):
blk = nn.Sequential(
nn.BatchNorm2d(in_channels),
nn.ReLU(),
nn.Conv2d(in_channels, out_channels, kernel_size=1),
nn.AvgPool2d(kernel_size=2, stride=2))
return blk
对上一个例子中稠密块的输出使用通道数为10的过渡层。此时输出的通道数减为10,高和宽均减半。
blk = transition_block(23, 10)
print(blk(Y).shape) # torch.Size([4, 10, 4, 4])
DenseNet模型
我们来构造DenseNet模型。DenseNet首先使用同ResNet一样的单卷积层和最大池化层。
net = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
类似于ResNet接下来使用的4个残差块,DenseNet使用的是4个稠密块。同ResNet一样,我们可以设置每个稠密块使用多少个卷积层。这里我们设成4,从而与上一节的ResNet-18保持一致。稠密块里的卷积层通道数(即增长率)设为32,所以每个稠密块将增加128个通道。
ResNet里通过步幅为2的残差块在每个模块之间减小高和宽。这里我们则使用过渡层来减半高和宽,并减半通道数。
num_channels, growth_rate = 64, 32 # num_channels为当前的通道数
num_convs_in_dense_blocks = [4, 4, 4, 4]
for i, num_convs in enumerate(num_convs_in_dense_blocks):
DB = DenseBlock(num_convs, num_channels, growth_rate)
net.add_module("DenseBlosk_%d" % i, DB)
# 上一个稠密块的输出通道数
num_channels = DB.out_channels
# 在稠密块之间加入通道数减半的过渡层
if i != len(num_convs_in_dense_blocks) - 1:
net.add_module("transition_block_%d" % i, transition_block(num_channels, num_channels // 2))
num_channels = num_channels // 2
同ResNet一样,最后接上全局池化层和全连接层来输出
net.add_module("BN", nn.BatchNorm2d(num_channels))
net.add_module("relu", nn.ReLU())
net.add_module("global_avg_pool", d2l.GlobalAvgPool2d()) # GlobalAvgPool2d的输出: (Batch, num_channels, 1, 1)
net.add_module("fc", nn.Sequential(d2l.FlattenLayer(), nn.Linear(num_channels, 10)))
我们尝试打印每个子模块的输出维度确保网络无误:
X = torch.rand((1, 1, 96, 96))
for name, layer in net.named_children():
X = layer(X)
print(name, ' output shape:\t', X.shape)
#output
0 output shape: torch.Size([1, 64, 48, 48])
1 output shape: torch.Size([1, 64, 48, 48])
2 output shape: torch.Size([1, 64, 48, 48])
3 output shape: torch.Size([1, 64, 24, 24])
DenseBlosk_0 output shape: torch.Size([1, 192, 24, 24])
transition_block_0 output shape: torch.Size([1, 96, 12, 12])
DenseBlosk_1 output shape: torch.Size([1, 224, 12, 12])
transition_block_1 output shape: torch.Size([1, 112, 6, 6])
DenseBlosk_2 output shape: torch.Size([1, 240, 6, 6])
transition_block_2 output shape: torch.Size([1, 120, 3, 3])
DenseBlosk_3 output shape: torch.Size([1, 248, 3, 3])
BN output shape: torch.Size([1, 248, 3, 3])
relu output shape: torch.Size([1, 248, 3, 3])
global_avg_pool output shape: torch.Size([1, 248, 1, 1])
fc output shape: torch.Size([1, 10])
获取数据并训练模型
由于这里使用了比较深的网络,本节里我们将输入高和宽从224降到96来简化计算。
batch_size = 256
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
完整代码
import time
import torch
from torch import nn, optim
import torch.nn.functional as F
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
def conv_block(in_channels, out_channels):
blk = nn.Sequential(nn.BatchNorm2d(in_channels),
nn.ReLU(),
nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1))
return blk
class DenseBlock(nn.Module):
def __init__(self, num_convs, in_channels, out_channels):
super(DenseBlock, self).__init__()
net = []
for i in range(num_convs):
in_c = in_channels + i * out_channels
net.append(conv_block(in_c, out_channels))
self.net = nn.ModuleList(net)
self.out_channels = in_channels + num_convs * out_channels # 计算输出通道数
def forward(self, X):
for blk in self.net:
Y = blk(X)
X = torch.cat((X, Y), dim=1) # 在通道维上将输入和输出连结
return X
# blk = DenseBlock(2, 3, 10)
# X = torch.rand(4, 3, 8, 8)
# Y = blk(X)
# print(Y.shape) # torch.Size([4, 23, 8, 8])
def transition_block(in_channels, out_channels):
blk = nn.Sequential(
nn.BatchNorm2d(in_channels),
nn.ReLU(),
nn.Conv2d(in_channels, out_channels, kernel_size=1),
nn.AvgPool2d(kernel_size=2, stride=2))
return blk
# blk = transition_block(23, 10)
# blk(Y).shape # torch.Size([4, 10, 4, 4])
net = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
num_channels, growth_rate = 64, 32 # num_channels为当前的通道数
num_convs_in_dense_blocks = [4, 4, 4, 4]
for i, num_convs in enumerate(num_convs_in_dense_blocks):
DB = DenseBlock(num_convs, num_channels, growth_rate)
net.add_module("DenseBlosk_%d" % i, DB)
# 上一个稠密块的输出通道数
num_channels = DB.out_channels
# 在稠密块之间加入通道数减半的过渡层
if i != len(num_convs_in_dense_blocks) - 1:
net.add_module("transition_block_%d" % i, transition_block(num_channels, num_channels // 2))
num_channels = num_channels // 2
net.add_module("BN", nn.BatchNorm2d(num_channels))
net.add_module("relu", nn.ReLU())
net.add_module("global_avg_pool", d2l.GlobalAvgPool2d()) # GlobalAvgPool2d的输出: (Batch, num_channels, 1, 1)
net.add_module("fc", nn.Sequential(d2l.FlattenLayer(), nn.Linear(num_channels, 10)))
X = torch.rand((1, 1, 96, 96))
# for name, layer in net.named_children():
# X = layer(X)
# print(name, ' output shape:\t', X.shape)
batch_size = 256
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
# print(net)