YOLOv5改进实战(导读篇) | YOLOv5 7.0 网络结构超详细解读

前言
YOLOv5 是一系列在 COCO 数据集上预训练的对象检测架构和模型,结合了在数千小时的研究和开发中获得的经验教训和最佳实践。本章节主要以yolov5s为例介绍YOLOv5-v7.0版本的网络结构及初始化超参数。
目录
- 一、YOLOv5s网络结构图
- 二、输入端
-
- (1) 自适应锚框计算
-
- 1.1 计算过程
- 1.2 默认锚框
- 1.3 自定义锚框
- 1.4 手动计算锚框
- (2) Mosaic数据增强
- 三、Backbone
-
- (1)CBS模块
- (2)C3模块
- (3)SPPF模块
- (4)Foucs结构(6.0版本开始已启用)
- 四、Neck
-
- (1)特征金字塔FPN+PAN
- 五、Head
- 六、超参数详解
一、YOLOv5s网络结构图
网络结构主要分为以下方面:
- 输入端:自适应锚框计算、自适应图片缩放、Mosaic数据增强
- Backbone:CBS模块,C3模块,SPPF模块
- Neck:FPN+PAN结构
- Head: CIOU Loss

特别注意:这是YOLOv5s的网络结构(因是自己画的图,难免会有疏漏,如有错误,望各位大佬在评论区指正!),想必很多小伙伴会有这样的疑惑,为什么我看到别人7.0版本的网络结构最后进入Head的是 80 ∗ 80 ∗ 256 80*80*256 80∗80∗256, 40 ∗ 40 ∗ 512 40*40*512 40∗40∗512和 20 ∗ 20 ∗ 1024 20*20*1024 20∗20∗1024,跟上面写的 80 ∗ 80 ∗ 128 80*80*128 80∗80∗128, 40 ∗ 40 ∗ 256 40*40*256 40∗40∗256和 20 ∗ 20 ∗ 512 20*20*512 20∗20∗512不一致,这个问题主要跟yolov5s.yaml中的width_multiple参数有关,本章后续会详细讲解。
二、输入端
(1) 自适应锚框计算
- 在YOLOv5中,每次训练开始之前,它都会根据你的数据集来自适应计算anchor锚框
- 若觉得计算的锚框效果不佳,可以将
--noautoanchor参数设置Truedefault值即可关闭parser.add_argument('--noautoanchor', default=True, action='store_true', help=' 不自动调整anchor,默认为False')
1.1 计算过程
- 读取训练集中所有图片的w、h以及检测框的w、h
- 将读取的坐标修正为绝对坐标
- 使用Kmeans算法对训练集中所有的检测框进行聚类,得到k个anchors
- 通过遗传算法对得到的anchors进行变异,如果变异后效果好将其保留,否则跳过
- 将最终得到的最优anchors按照面积返回
1.2 默认锚框
在 YOLOv5 的配置文件model/*.yaml 中已经预设了一些针对 COCO数据集在 640 × 640 640×640 640×640图像大小下锚定框的尺寸:
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
- anchors参数共有三行,每行6个数值;且每一行代表应用不同的特征图;
- 第一行是在最大的特征图上的锚框, 80 x 80 80x80 80x80代表浅层的特征图(P3),包含较多的低层级信息,适合用于检测小目标,所以这一特征图所用的anchor尺度较小;
- 第二行是在中间的特征图上的锚框, 40 x 40 40x40 40x40特征图上就用介于这两个尺度之间的anchor用来检测中等大小的目标;
- 第三行是在最小的特征图上的锚框, 20 x 20 20x20 20x20代表深层的特征图,包含更多高层级的信息,如轮廓、结构等信息,适合用于大目标的检测,所以这一特征图所用的anchor尺度较大。
1.3 自定义锚框
锚框核查函数 /utils/autoanchor.py 文件中:
@TryExcept(f'{PREFIX}ERROR')
def check_anchors(dataset, model, thr=4.0, imgsz=640):
# Check anchor fit to data, recompute if necessary
m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
def metric(k): # compute metric
r = wh[:, None] / k[None]
x = torch.min(r, 1 / r).min(2)[0] # ratio metric
best = x.max(1)[0] # best_x
aat = (x > 1 / thr).float().sum(1).mean() # anchors above threshold
bpr = (best > 1 / thr).float().mean() # best possible recall
return bpr, aat
stride = m.stride.to(m.anchors.device).view(-1, 1, 1) # model strides
anchors = m.anchors.clone() * stride # current anchors
bpr, aat = metric(anchors.cpu().view(-1, 2))
s = f'\n{PREFIX}{aat:.2f} anchors/target, {bpr:.3f} Best Possible Recall (BPR). '
if bpr > 0.98: # threshold to recompute
LOGGER.info(f'{s}Current anchors are a good fit to dataset ✅')
else:
LOGGER.info(f'{s}Anchors are a poor fit to dataset ⚠️, attempting to improve...')
na = m.anchors.numel() // 2 # number of anchors
anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
new_bpr = metric(anchors)[0]
if new_bpr > bpr: # replace anchors
anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
m.anchors[:] = anchors.clone().view_as(m.anchors)
check_anchor_order(m) # must be in pixel-space (not grid-space)
m.anchors /= stride
s = f'{PREFIX}Done ✅ (optional: update model *.yaml to use these anchors in the future)'
else:
s = f'{PREFIX}Done ⚠️ (original anchors better than new anchors, proceeding with original anchors)'
LOGGER.info(s)
YOLOv5 在开始训练前会计算数据集标注信息针对默认锚定框的最佳召回率,如果最佳召回率大于或等于0.98,则不需要重新计算锚定框,使用默认锚框;如果最佳召回率小于0.98,则需要重新计算符合此数据集的锚框。
def metric(k): # compute metric
r = wh[:, None] / k[None]
x = torch.min(r, 1 / r).min(2)[0] # ratio metric
best = x.max(1)[0] # best_x
aat = (x > 1 / thr).float().sum(1).mean() # anchors above threshold
bpr = (best > 1 / thr).float().mean() # best possible recall
return bpr, aat
stride = m.stride.to(m.anchors.device).view(-1, 1, 1) # model strides
anchors = m.anchors.clone() * stride # current anchors
bpr, aat = metric(anchors.cpu().view(-1, 2))
其中,bpr(best possible recall)参数就是判断是否需要重新计算锚定框的依据(是否小于 0.98)
重新计算符合此数据集标注框的锚定框,是利用 k均值聚类算法(k-means clustering)和遗传算法(genetic algorithm)实现的
1.4 手动计算锚框
import utils.autoanchor as autoAC
# 对数据集重新计算 anchors
new_anchors = autoAC.kmean_anchors('./data/mydata.yaml', 9, 640, 5.0, 1000, True)
print(new_anchors)
(2) Mosaic数据增强
最早出现于YOLOv4,YOLOv5也是延用了Mosaic数据增强。Mosaic数据增强的主要思想是将多张图片按一定比例组合成一张图片,实则是参考了CutMix数据增强方式,CutMix数据增强是将两张图片进行拼接,Mosaic数据增强则利用了四张图片,对四张图片进行拼接,每一张图片都有其对应的目标框,将四张图片拼接之后就获得一张新的图片,同时也获得这张图片对应的目标框,然后我们将这样一张新的图片传入到神经网络当中去学习,相当于一下子传入四张图片进行学习。
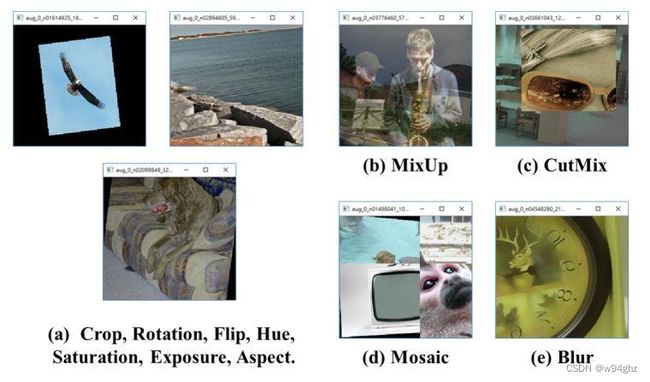
Mosaic数据增强的主要步骤:
- 随机选择四张不同的图像作为输入
- 分别对四张图片进行翻转(对原始图片进行左右的翻转)、缩放(对原始图片进行大小的缩放)、色域变化(对原始图片的明亮度、饱和度、色调进行改变)等操作。
- 操作完成之后然后再将原始图片按照 第一张图片摆放在左上,第二张图片摆放在左下,第三张图片摆放在右下,第四张图片摆放在右上四个方向位置摆好。
- 根据每张图片的尺寸变换方式,将映射关系对应到图片标签上。
- 依据指定的横纵坐标,对大图进行拼接。处理超过边界的检测框坐标。
Mosaic数据增强的优点:
- 增加数据多样性,随机选取四张图像进行组合,组合得到图像个数比原图个数要多。
- 增强模型鲁棒性,混合四张具有不同语义信息的图片,可以让模型检测超出常规语境的目标。
- 加强批归一化层(Batch Normalization)的效果。当模型设置 BN 操作后,训练时会尽可能增大批样本总量(BatchSize),因为 BN 原理为计算每一个特征层的均值和方差,如果批样本总量越大,那么 BN 计算的均值和方差就越接近于整个数据集的均值和方差,效果越好。
- Mosaic 数据增强算法有利于提升小目标检测性能。Mosaic 数据增强图像由四张原始图像拼接而成,这样每张图像会有更大概率包含小目标。
⭐YOLOv5训练默认是开启了Mosaic数据增强的,可参考本章第六节超参数详解-(1)hpy超参数所以各位小伙伴可以放心训练!⭐
三、Backbone
Backbone骨干网络的主要作用就是提取特征,并不断缩小特征图。Backbone中的主要结构有Conv模块、C3模块、SPPF模块。
(1)CBS模块
由一个Conv2d、一个BatchNorm2d和SiLU激活函数构成。如下图所示:

Conv2d的padding是自动计算的,通过修改stride来决定特征图缩小的倍数。def autopad(k, p=None, d=1): # kernel, padding, dilation # Pad to 'same' shape outputs if d > 1: k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k] # actual kernel-size if p is None: p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad return p- 在Backbone中CBS模块的stride均为2,kernel均为3。因此CBS模块每次会将特征图的宽高减半,下采样特征图,同时提取到目标特征。
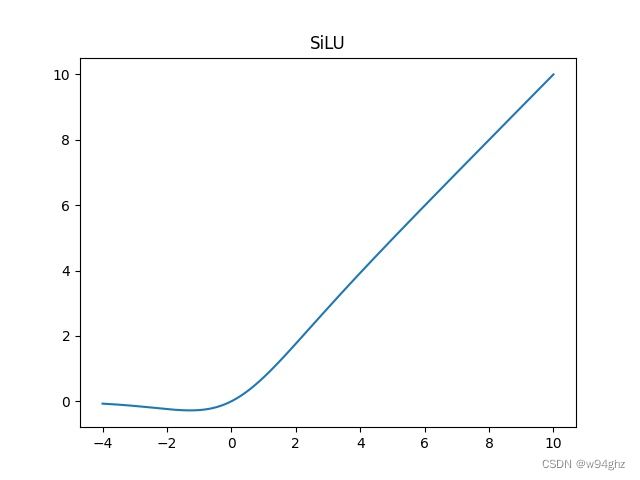
BatchNorm2d为批归一化层,对每批的数据做归一化,其详细作用不在这里赘述。SiLU激活函数,SiLU是Sigmoid和ReLU的改进版。SiLU具备无上界有下界、平滑、非单调的特性。SiLU在深层模型上的效果优于 ReLU。具有平滑性和非线性特性,有助于网络在训练过程中更快地收敛。
σ ( x ) = x ∗ s i g m o i d ( x ) = x 1 + e − x \sigma \left ( x \right ) = x*sigmoid\left ( x \right ) =\frac{x}{1+e^{-x} } σ(x)=x∗sigmoid(x)=1+e−xx
(2)C3模块
C3由三个CBS模块和一个BottleNeck模块组成,得名C3。在Backbone中,C3是更为重要的提取特征的模块。其结构图如下:

- 进入C3后,将会分为两路,左路经过CBS和一个Bottleneck,右路只经过一个CBS,最后将两路Concat,再经过一个CBS。C3中的3个CBS模块均为 1 ∗ 1 1*1 1∗1卷积,起到降维或升维的作用,对于提取特征意义不大。
- Bottleneck在Backbone中使用的是残差连接,Bottleneck中有两个CBS,第一个CBS为 1 ∗ 1 1*1 1∗1卷积,将通道缩减为原来的一半,第二个为 3 ∗ 3 3*3 3∗3卷积,将通道数翻倍。先降维有利于卷积核更好的理解特征信息,升维将有利于提取到更多更详细的特征。
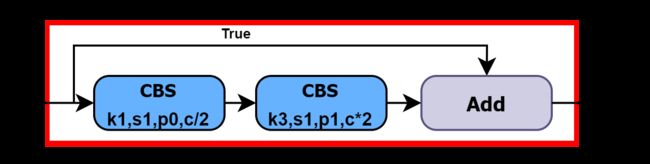
- 在残差结构中,主分支和残差分支的特征图尺寸和维度是相同的。
add操作是将主分支和残差分支的特征图进行直接相加,不会改变特征图的尺寸和维度,只是将对应位置的特征值进行相加。下述C3中带有False参数则表示不使用残差结构。通过残差结构,可以实现在深层网络中传递梯度和信息的快速传递,并有助于解决深层网络训练中的梯度消失问题。

(3)SPPF模块
SPP是空间金字塔池化,采用 1 × 1 1×1 1×1, 5 × 5 5×5 5×5, 9 × 9 9×9 9×9, 13 × 13 13×13 13×13的最大池化的方式,进行多尺度融合。YOLOv5 6.0版本开始使用了在SPP基础上改进的SPPF。

- SPP是将三个并行的MaxPool2d和输入Concat到一起,第一个MaxPool2d的kernel为 5 ∗ 5 5*5 5∗5,第二个为 9 ∗ 9 9*9 9∗9,第三个为 13 ∗ 13 13*13 13∗13。用三个不同大小的kernel,代表三个尺度。 5 ∗ 5 5*5 5∗5的kernel可以理解为比较大的尺度,而 13 ∗ 13 13*13 13∗13就是比较小的尺度。这样就在图片的不同尺度下取到了最大的代表特征值,并Concat融合。
- SPPF是将三个kernel为 5 ∗ 5 5*5 5∗5的MaxPool2d做串行计算。第一个MaxPool2d表示较大的尺度,第二个MaxPool在第一个MaxPool2d的基础上进一步做池化,那么产生的尺度将会进一步缩小,第三个同理。
注意:图像的尺度并非指图像的大小,而是指图像的模糊程度(σ),例如,人近距离看一个物体和远距离看一个物体模糊程度是不一样的,从近距离到远距离图像越来越模糊的过程,也是图像的尺度越来越大的过程。
(4)Foucs结构(6.0版本开始已启用)
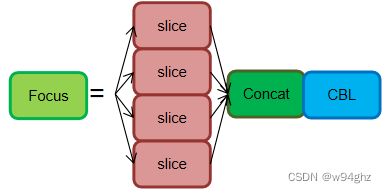
Focus模块是对图片进行切片操作,具体操作是在一张图片中每隔一个像素拿到一个值,这样获得了四个独立的特征层,然后将四个独立的特征层进行堆叠,此时宽高信息就集中到了通道信息,输入通道扩充了四倍。拼接起来的特征层相对于原先的三通道变成了十二个通道,最后将得到的新图片再经过卷积操作,最终得到了没有信息丢失情况下的二倍下采样特征图。

YOLOv5 6.0开始将Focus模块替换成了一个 6 ∗ 6 6*6 6∗6的卷积层。两者的计算量是等价的,但使用 6 ∗ 6 6*6 6∗6的卷积会更加高效。
四、Neck
Neck的作用就是从Backbone中获取相对于较浅的特征,再与深层的语义特征Concat到一起。
(1)特征金字塔FPN+PAN
FPN 结构通过自顶向下进行上采样,使得底层特征图包含更强的图像强语义信息
- 传入FPN结构中,通过Upsample上采样的方式,向特征图中插值,使特征图的尺寸变大,以便于融合来自Backbone的特征图,做特征的向上融合,特征图不断变大;
- PAN 结构自底向上进行下采样,使顶层特征包含图像位置信息,两个特征最后进行融合,使不同尺寸的特征图都包含图像语义信息和图像特征信息,保证了对不同尺寸的图片的准确预测。
总结:FPN层自顶向下可以捕获强语义特征,而PAN则通过自底向上传达强定位特征。
五、Head
Head层为Detect模块,Detect模块的网络结构很简单,仅由三个 1 ∗ 1 1*1 1∗1卷积构成,对应三个检测特征层。

- 上述经过FPN特征金字塔,我们可以获得 20 ∗ 20 ∗ 512 20*20*512 20∗20∗512、 40 ∗ 40 ∗ 256 40*40*256 40∗40∗256、 80 ∗ 80 ∗ 128 80*80*128 80∗80∗128三个加强特征,然后我们利用这三个shape的特征层传入Yolo Head获得预测结果。
- 对于每一个特征层,我们可以获得利用一个 1 ∗ 1 1*1 1∗1卷积调整通道数,最终的通道数和需要区分的种类个数相关,每一个特征层上每一个特征点存在3个先验框。
- 如果使用的是COCO训练集,类则为 80 80 80种,最后的维度应该为 255 = 3 ∗ 85 255 = 3*85 255=3∗85,三个特征层的shape为 20 ∗ 20 ∗ 255 20*20*255 20∗20∗255、 40 ∗ 40 ∗ 255 40*40*255 40∗40∗255、 80 ∗ 80 ∗ 255 80*80*255 80∗80∗255
最后的255可以拆分成 3 3 3个 85 85 85,对应 3 3 3个先验框的 85 85 85个参数,85可以拆分成 4 + 1 + 80 4+1+80 4+1+80。
这里的3是指每个位置先验框(锚框)的数量;
前4个参数用于判断每一个特征点的回归参数,回归参数调整后可以获得预测框;
第5个参数用于判断每一个特征点是否包含物体;
最后80个参数用于判断每一个特征点所包含的物体种类。
六、超参数详解
(1)hpy超参数
- 文件位于
data/hyps文件夹下# Hyperparameters for VOC finetuning # ython train.py --batch 64 --weights yolov5m.pt --data voc.yaml --img 512 --epochs 50 lr0: 0.01 # 学习率, SGD=1E-2, Adam=1E-3 lrf: 0.01 # 余弦退火超参数 momentum: 0.937 # 学习率动量 weight_decay: 0.0005 # 权重衰减系数 warmup_epochs: 3.0 # 预热学习epoch warmup_momentum: 0.8 # 预热学习率动量 warmup_bias_lr: 0.1 # 预热学习率 box: 0.05 # Bounding Box Regeression 损失的系数 cls: 0.5 # 分类损失的系数 cls_pw: 1.0 # 分类BCELoss中正样本的权重 obj: 1.0 # 有无物体损失的系数 obj_pw: 1.0 # 有无物体BCELoss中正样本的权重 iou_t: 0.20 # 标签与anchors的iou阈值 iou training threshold anchor_t: 4 # 标签的长h宽w/anchor的长h_a宽w_a阈值, 即h/h_a, w/w_a都要在(1/4, 4)之间anchor-multiple threshold # anchors: 3.63 # 下面是一些数据增强的系数, 包括颜色空间和图片空间 fl_gamma: 0.0 hsv_h: 0.015 # 色调 hsv_s: 0.7 # 饱和度 hsv_v: 0.4 # 明度 degrees: 0.0 #旋转角度 translate: 0.1 # 水平和垂直平移 scale: 0.5 # 缩放 shear: 0.0 # 剪切 perspective: 0.0 # 透视变换参数 flipud: 0.0 # 上下翻转 fliplr: 0.5 # 左右翻转 mosaic: 1.0 #进行mosaic的概率 mixup: 0.0 #进行mixup的概率, 在mosaic启用时才可启用 copy_paste: 0.0 # segment copy-paste (probability), 在mosaic启用时, 才可以启用
(3)Acnhor
- YOLOv5在yaml文件中预设好了输入图像为 640 ∗ 640 640*640 640∗640分辨率对应的anchor尺寸,YOLOv5的anchor也是在大特征图上检测小目标,在小特征图上检测大目标。三个特征图,每个特征图上的格子有三种尺寸的anchor。
# anchors anchors: - [10,13, 16,30, 33,23] # P3/8 检测小目标 10,13是一组尺寸,一共三组 - [30,61, 62,45, 59,119] # P4/16 - [116,90, 156,198, 373,326] # P5/32 检测大目标
(4)Backbone
- YOLOv5 Backbone
# YOLOv5s v6.0 backbone backbone: # YOLOv5 v6.0 backbone backbone: # from 第一列 输入来自哪一层 -1代表上一层, 4代表第4层 # number 第二列 卷积核的数量 最终数量需要乘上width # module 第三列 模块名称 包括:Conv Focus BottleneckCSP SPP # args 第四列 模块的参数 # [from, number, module, args] [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2 [-1, 1, Conv, [128, 3, 2]], # 1-P2/4 卷积核的数量 = 128 * wedith = 128*0.5=64 [-1, 3, C3, [128]], # 模块数量 = 3 * depth =3*0.33=1 [-1, 1, Conv, [256, 3, 2]], # 3-P3/8 [-1, 6, C3, [256]], # 模块数量 = 6 * depth =6*0.33=2 [-1, 1, Conv, [512, 3, 2]], # 5-P4/16 [-1, 9, C3, [512]], # # 模块数量 = 9 * depth =9*0.33=3 [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32 [-1, 3, C3, [1024]], [-1, 1, SPPF, [1024, 5]], # 9 ]
(5)网络结构参数
-
根据训练过程验证网络结构,结合训练时输出的网络结构信息
**backbone的前3个C3数量对应yolov5s.yaml的配置3,6,9分别除了3,变为1/3后的1,2,3,和模型深度参数有关depth_multiple: 0.33** 层数,第几层 from n params module arguments ch[-1] 数量 参数量 模块名称(m) 网络结构参数:输入维度,输出维度,卷积核大小,卷积步长 0 -1 1 3520 models.common.Conv [3, 32, 6, 2, 2] 1 -1 1 18560 models.common.Conv [32, 64, 3, 2] 2 -1 1 18816 models.common.C3 [64, 64, 1] 3 -1 1 73984 models.common.Conv [64, 128, 3, 2] 4 -1 2 115712 models.common.C3 [128, 128, 2] 5 -1 1 295424 models.common.Conv [128, 256, 3, 2] 6 -1 3 625152 models.common.C3 [256, 256, 3] 7 -1 1 1180672 models.common.Conv [256, 512, 3, 2] 8 -1 1 1182720 models.common.C3 [512, 512, 1] 9 -1 1 656896 models.common.SPPF [512, 512, 5] 10 -1 1 131584 models.common.Conv [512, 256, 1, 1] 12 [-1, 6] 1 0 models.common.Concat [1] 13 -1 1 361984 models.common.C3 [512, 256, 1, False] 14 -1 1 33024 models.common.Conv [256, 128, 1, 1] 15 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest'] 16 [-1, 4] 1 0 models.common.Concat [1] 17 -1 1 90880 models.common.C3 [256, 128, 1, False] 18 -1 1 147712 models.common.Conv [128, 128, 3, 2] 19 [-1, 14] 1 0 models.common.Concat [1] 20 -1 1 296448 models.common.C3 [256, 256, 1, False] 21 -1 1 590336 models.common.Conv [256, 256, 3, 2] 22 [-1, 10] 1 0 models.common.Concat [1] 23 -1 1 1182720 models.common.C3 [512, 512, 1, False] 24 [17, 20, 23] 1 229245 Detect [80, [[10, 13, 16, 30, 33, 23], [30, 61, 62, 45, 59, 119], [116, 90, 156, 198, 373, 326]], [128, 256, 512]]