OpenCV 笔记(2):图像的属性以及像素相关的操作
Part11. 图像的属性
11.1 Mat 的主要属性
在前文中,我们大致了解了 Mat 的基本结构以及它的创建与赋值。接下来我们通过一个例子,来看看 Mat 所包含的常用属性。
先创建一个 3*4 的四通道的矩阵,并打印出其相关的属性,稍后会详细解释每个属性的含义。
Mat srcImage(3, 4, CV_16UC4, Scalar_(1, 2, 3, 4));
cout << srcImage << endl;
cout << "dims:" << srcImage.dims << endl;
cout << "rows:" << srcImage.rows << endl;
cout << "cols:" << srcImage.cols << endl;
cout << "channels:" << srcImage.channels() << endl;
cout << "type:" << srcImage.type() << endl;
cout << "depth:" << srcImage.depth() << endl;
cout << "elemSize:" << srcImage.elemSize() << endl;
cout << "elemSize1:" << srcImage.elemSize1() << endl;
cout << "step:" << srcImage.step << endl;
cout << "step[0]:" << srcImage.step[0] << endl;
cout << "step[1]:" << srcImage.step[1] << endl;
cout << "step1[0]:" << srcImage.step1(0) << endl;
cout << "step1[1]:" << srcImage.step1(1) << endl; 输出结果:
[1, 2, 3, 4, 1, 2, 3, 4, 1, 2, 3, 4, 1, 2, 3, 4;
1, 2, 3, 4, 1, 2, 3, 4, 1, 2, 3, 4, 1, 2, 3, 4;
1, 2, 3, 4, 1, 2, 3, 4, 1, 2, 3, 4, 1, 2, 3, 4]
dims:2
rows:3
cols:4
channels:4
type:26
depth:2
elemSize:8
elemSize1:2
step:32
step[0]:32
step[1]:8
step1[0]:16
step1[1]:4在上述例子中我们打印了 Mat 的很多属性,它们主要包括:
rows: 表示图像的高度。
cols:表示图像的宽度。
dims:表示矩阵的维度。
data:表示 Mat 对象中的指针(uchar 类型的指针),指向内存中存放矩阵数据的一块内存 (uchar* data)。
channels:表示通道数量;例如常见的 RGB、HSV 彩色图像,则 channels=3;若为灰度图,则 channels=1。
depth:表示图像的深度,它用来度量每一个像素中每一个通道的精度,它本身与通道数无关,它的数值越大表示精度越高。
| 数据类型 | depth 的值 | 数据类型 | 取值范围 | 对应 C++ 的类型 |
|---|---|---|---|---|
| CV_8U | 0 | 8 位无符号类型 | 0—255 | uchar, unsigned char |
| CV_8S | 1 | 8 位有符号类型 | -128—127 | char |
| CV_16U | 2 | 16 位无符号类型 | 0—65535 | ushort, unsigned short, unsigned short int |
| CV_16S | 3 | 16 位有符号类型 | -32768—32767 | short, short int |
| CV_32S | 4 | 32 位整数数据类型 | -2147483648—2147483647 | int, long |
| CV_32F | 5 | 32 位浮点数类型 | ±(1.18e-38……3.40e38) | float |
| CV_64F | 6 | 32 位双精度类型 | ±(2.23e-308……1.79e308) | double |
type:表示矩阵的数据类型,它包含矩阵中元素的类型以及通道数信息。
| 数据类型 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| CV_8U | CV_8UC1 | CV_8UC2 | CV_8UC3 | CV_8UC4 |
| CV_8S | CV_8SC1 | CV_8SC2 | CV_8SC3 | CV_8SC4 |
| CV_16U | CV_16UC1 | CV_16UC2 | CV_16UC3 | CV_16UC4 |
| CV_16S | CV_16SC1 | CV_16SC2 | CV_16SC3 | CV_16SC4 |
| CV_32S | CV_32SC1 | CV_32SC2 | CV_32SC3 | CV_32SC4 |
| CV_32F | CV_32FC1 | CV_32FC2 | CV_32FC3 | CV_32FC4 |
| CV_64F | CV_64FC1 | CV_64FC2 | CV_64FC3 | CV_64FC4 |
elemSize:表示矩阵中每一个元素的数据大小,它与通道数相关,单位是字节。 举几个例子: 如果 Mat 中的数据类型是 CV_8UC1 或 CV_8SC1,那么 elemSize=1(1 * 8 / 8 = 1 bytes); 如果 Mat 中的数据类型是 CV_8UC3 或 CV_8SC3,那么 elemSize=3(3 * 8 / 8 = 3 bytes); 如果 Mat 中的数据类型是 CV_16UC3 或 CV_16SC3,那么 elemSize=6(3 * 16 / 8 = 6 bytes); 如果 Mat 中的数据类型是 CV_32SC3 或 CV_32FC3,那么 elemSize=12(3 * 32 / 8 = 12 bytes);
elemSize1:表示矩阵中每一个元素单个通道的数据大小,单位是字节。满足:
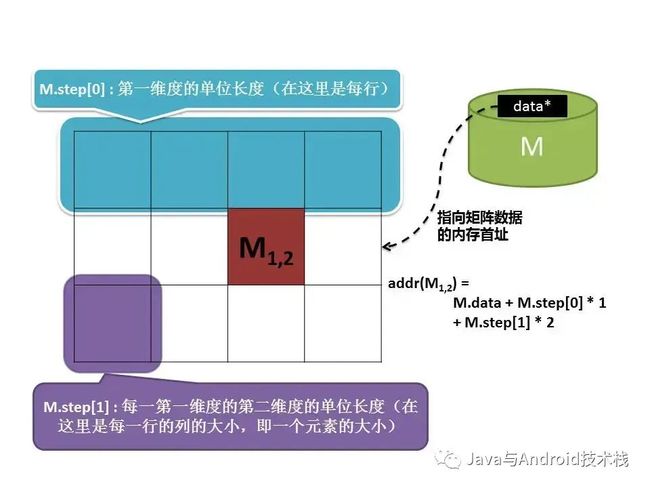
step: 字面意思是“步长”,实际上它描述了矩阵的形状。 step[] 为一个数组,矩阵有几维,step[] 数组就有几个元素。以一个三维矩阵为例,step[0] 表示一个平面的字节总数,step[1] 表示一行元素的字节总数,step[2] 表示每一个元素的字节总数。
在 OpenCV 的官方文档中,关于解释 step 时曾提到矩阵数据元素
的地址:对于我们常用的二维数组,上述公式可化简为:
这里的 step[0] 表示一行元素的字节总数,step[1] 表示每一个元素的字节总数。
 mat.png
mat.png
step1: step1 也是一个数组。step1 不再以字节为单位,而是以 elemSize1 为单位,满足:
Part22. 图像的像素操作
22.1 像素的类型
我们最常用的图像是二维数组,灰度图像(CV_8UC1)会存放 C++ 的 uchar 类型,RGB 彩色图像一般会存放 Vec3b 类型。
其中,单通道数据存放格式: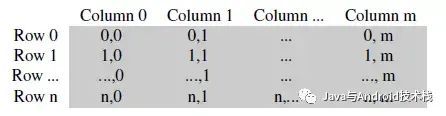
三通道数据存放格式:
对于彩色图像而言,在 OpenCV 中通道的顺序是 B、G、R,这跟我们通常所说的 RGB 三原色正好相反。
当然,灰度图像也不一定都是 CV_8UC1 类型,也可能是 CV_16SC1、CV_32FC1 等,它们会存放 C++ 的 short、float 等基本类型。类似地,彩色图像也可能是 CV_16SC3、CV_32FC3 等,那它们是怎么存放的呢?
OpenCV 定义了一系列的 Vec 类,它是一个一维的向量,代表像素的类型。
typedef Vec Vec2b;
typedef Vec Vec3b;
typedef Vec Vec4b;
typedef Vec Vec2s;
typedef Vec Vec3s;
typedef Vec Vec4s;
typedef Vec Vec2w;
typedef Vec Vec3w;
typedef Vec Vec4w;
typedef Vec Vec2i;
typedef Vec Vec3i;
typedef Vec Vec4i;
typedef Vec Vec6i;
typedef Vec Vec8i;
typedef Vec Vec2f;
typedef Vec Vec3f;
typedef Vec Vec4f;
typedef Vec Vec6f;
typedef Vec Vec2d;
typedef Vec Vec3d;
typedef Vec Vec4d;
typedef Vec Vec6d; 其中 b、s、w、i、f、d 分别表示如下的含义:
| 数据类型 | |
|---|---|
| b | unsigned char |
| s | short int |
| w | unsigned short |
| i | int |
| f | float |
| d | double |
Vec 类又被称为固定向量类,在编译时就知道向量的大小。类似 Vec 这样的类还有:Matx、Point、Size、Rect
我们用一张表,总结一下矩阵中的数据类型和像素的类型的对应关系:
| 数据类型 | C1 | C2 | C3 | C4 | C6 |
|---|---|---|---|---|---|
| CV_8U | uchar | Vec2b | Vec3b | Vec4b | |
| CV_8S | char | Vec |
Vec |
Vec |
|
| CV_16U | ushort | Vec2w | Vec3w | Vec4w | |
| CV_16S | short | Vec2s | Vec3s | Vec4s | |
| CV_32S | int | Vec2i | Vec3i | Vec4i | |
| CV_32F | float | Vec2f | Vec3f | Vec4f | Vec6f |
| CV_64F | double | Vec2d | Vec3d | Vec4d | Vec6d |
基于上述表格我们可以回答刚才的问题,CV_16SC3 类型的图像存放的是 Vec3s 类型,CV_32FC3 类型的图像存放的是 Vec3f 类型。
32.2 像素点的读取
Mat 的 at() 函数实现了对矩阵中的某个像素的读写操作。
下面的代码展示了 at() 函数对灰度图像像素的读写:
Scalar value = grayImage.at(y, x);
Scalar.at(y, x) = 128; 三通道彩色的图像的读取:
Vec3b value = image.at(y, x);
uchar blue = value.val[0];
uchar green = value.val[1];
uchar red = value.val[2]; 三通道彩色图像的赋值:
image.at(y,x)[0]=128;
image.at(y,x)[1]=128;
image.at(y,x)[2]=128; 下面的例子结合像素的类型,展示了将加载的图像转换成灰度图像,以及对灰度图像进行取反的操作。
Mat srcImage = imread("/Users/tony/beautiful.jpg");
if (srcImage.empty())
{
cout << "could not load image ..." << endl;
return -1;
}
imshow("src", srcImage);
Mat grayImage;
cvtColor(srcImage, grayImage, COLOR_BGR2GRAY); // 灰度处理
imshow("gray",grayImage);
int height = grayImage.rows;
int width = grayImage.cols;
for (int row=0; row(row, col);
grayImage.at(row, col) = 255- gray;
}
}
imshow("invert", grayImage);  像素点操作.png
像素点操作.png
简单提一下,上述例子中 cvtColor() 函数的作用是将图像从一个颜色空间转换到另一个颜色空间。例如,可以将图像从 BGR 色彩空间转换成灰度色彩空间,或者从 BGR 色彩空间转换成 HSV 色彩空间等等。
42.3 图像的遍历
2.3.1 基于数组遍历
前面 2.2 介绍过 at() 函数可以对某个像素进行读写操作,并用例子展示了对单通道进行遍历。
对于三通道的彩色图像可以这样遍历。
for(int i=0;i(i,j)[0]=... //B通道
srcImage.at(i,j)[1]=... //G通道
srcImage.at(i,j)[2]=... //R通道
}
} 2.3.2 基于指针遍历
Mat 类提供了更高效的 ptr() 函数,它可以得到图像任意行首地址。
下面的代码,它返回第 i+1 行的首地址,也就是指向第 i+1 行第一个元素的指针。
uchar* data = srcImage.ptr(i); at() 函数跟 ptr() 函数在使用上有一定的区别:
at<类型>(i,j)
ptr<类型>(i)
当然,使用 ptr() 函数访问某个像素也是可以的,采用如下的方式:
mat.ptr(row)[col] 它返回的是 <> 中的模板类型指针,指向的是第 row+1 行 col+1 列的元素。
对于单通道图像的遍历:
for(int i=0;i(i);
for(int j=0;j 对于三通道图像的遍历:
for(int i=0;i(i);
for(int j=0;j 2.3.3 基于迭代器遍历
C++ STL 对每个集合类都定义了对应的迭代器类,OpenCV 也提供了 cv::Mat 的迭代器类,并且与 C++ STL 中的标准迭代器兼容。
对于单通道图像的遍历:
Mat_::iterator begin = srcImage.begin();
Mat_::iterator end = srcImage.end();
for (auto it = begin; it != end; it++)
{
*it = ...
} 迭代器 Mat_ 是 Mat 的模版子类,它重载了 operator() 让我们可以更方便的取图像上的点。类似的迭代器还有 Matlterator_。
对于三通道图像的遍历:
Mat_::iterator begin = srcImage.begin();
Mat_::iterator end = srcImage.end();
for (auto it = begin; it != end; it++)
{
(*it)[0] = ... //B通道
(*it)[1] = ... //G通道
(*it)[2] = ... //R通道
} 使用迭代器遍历图像会便捷一些,但是效率没有使用指针的效率高。
52.3.4 基于 LUT 遍历
LUT (LOOK -UP-TABLE) 意为查找表。
在数据结构中,查找表是由同一类型的 数据元素 构成的集合,它是一种以查找为“核心”,同时包括其他运算的非常灵活的数据结构。
在图像处理中,经常会通过事先建立一张查找表对图像进行映射。
例如,将灰度图由某个区间映射到另一个区间,或者将单通道映射到三通道。它们都是以像素灰度值作为索引,以灰度值映射后的数值作为表中的内容,通过索引号与映射后的输出值建立联系。
一般灰度图像会有 0-255 个灰度值,有时我们不需要这么精确的灰度级,例如黑白图像。下面我们来展示如何建立一个 LUT,将 64 到 196 之间的灰度值变成 0,其余变成 1。
Mat lut(1, 256, CV_8U);
for (int i = 0; i < 256; i++)
{
if (i > 64 and i < 196)
{
lut.at(i) = 0;
}
else
{
lut.at(i) = i;
}
} 从上述代码可以看出,通过改变图像中像素的灰度值,LUT 可以降低灰度级提高运算速度。
LUT 只适用于 CV_8U 类型的图像。
当然,查找表并不一定都是单通道的。
如果输入图像为单通道,那么查找表为单通道。
如果输入图像为三通道,那么查找表可以为单通道或者三通道。
使用 LUT 进行遍历,采用的是颜色空间缩减的方式:把 unsigned char 类型的值除以一个 int 类型的值,得到仍然是一个 char 类型的数值。
我们采用如下的公式:
其中,Q 表示量化级别,当 Q= 10 时则灰度值 1-10 用灰度值 1 表示,灰度值 11-20 用灰度值 11 表示,以此类推。256 个灰度值的灰度图像可以用 26 个数值表示,那么彩色的图像就可以用 26 * 26 * 26 个数值表示,比原先小了很多。
#include
#include
#include
using namespace std;
using namespace cv;
#define QUAN_VAL1 10
#define QUAN_VAL2 20
#define QUAN_VAL3 100
void createLookupTable(Mat& table, uchar quanVal)
{
table.create(1,256,CV_8UC1);
uchar *p = table.data;
for(int i = 0; i < 256; ++i)
{
p[i] = quanVal*(i/quanVal); // 颜色缩减运算
}
}
int main()
{
Mat srcImage = imread("/Users/tony/beautiful.jpg");
if (srcImage.empty())
{
cout << "could not load image ..." << endl;
return -1;
}
imshow("src", srcImage); // 原图
Mat table,dst1,dst2,dst3;
createLookupTable(table, QUAN_VAL1);
LUT(srcImage, table, dst1);
createLookupTable(table, QUAN_VAL2);
LUT(srcImage, table, dst2);
createLookupTable(table, QUAN_VAL3);
LUT(srcImage, table, dst3);
imshow("dst1", dst1); // Q=10
imshow("dst2", dst2); // Q=20
imshow("dst3", dst3); // Q=100
waitKey(0);
return 0;
}  lut.png
lut.png
上述例子在创建查找表时,遍历了矩阵的每一个像素以及运用颜色空间缩减的运算公式。并且分别展示了原图、Q=10、Q=20、Q=100 的图片。可以看到当 Q = 100 时,图像压缩得比较厉害丢失了很多信息。
Part33. 图像像素值的统计
63.1 均值与标准差
均值和标准差是统计学的概念。
均值的公式:
标准差公式:
在图像处理中,它们能帮助我们了解图像通道中像素值的分布情况。均值表示图像整体的亮暗程度,图像的均值越大则表示图像越亮。标准差表示图像中明暗变化的对比程度,标准差越大表示图像中明暗变化越明显。
在图像分析的时候,我们通过图像像素值的统计,可以对图像的有效信息作出判断。当标准差很小时,图像所携带的有效信息会很少,便于我们判断这是否是我们所需要的图像。说一个题外话,曾经我看到过一段很震惊的代码,某同事写的判断传送带上手机是否亮屏。当时的代码可能是为了偷懒,只通过判断图像的均值,当均值超过某个阈值时就认为手机是亮屏的。后来我接手后,当即做了大量的修改。
下面举个例子,通过 meanStdDev() 函数获取图像的均值和标准差,以及每个通道的均值和标准差。
Mat srcImage = imread("/Users/tony/beautiful.jpg");
if (srcImage.empty())
{
cout << "could not load image ..." << endl;
return -1;
}
imshow("src", srcImage);
Mat mean, stddev;
meanStdDev(srcImage, mean, stddev);
std::cout << "mean:" << std::endl << mean << std::endl;
std::cout << "stddev:" << std::endl<< stddev << std::endl;
printf("blue channel mean:%.2f, stddev: %.2f \n", mean.at(0, 0), stddev.at(0, 0));
printf("green channel mean:%.2f, stddev: %.2f \n", mean.at(1, 0), stddev.at(1, 0));
printf("red channel mean:%.2f, stddev: %.2f \n", mean.at(2, 0), stddev.at(2, 0)); 输出结果:
mean:
[91.28189117330051;
104.7030620995939;
118.9715339648672]
stddev:
[77.24017058254671;
79.5424883584348;
83.89088339080149]
blue channel mean:91.28, stddev: 77.24
green channel mean:104.70, stddev: 79.54
red channel mean:118.97, stddev: 83.89Part44. 总结
本文过一个简单的例子,介绍了 Mat 经常使用的属性和方法。后续还介绍了像素的类型和多种图像遍历的方式、像素值的统计。
在几种图像遍历方式中,除了 LUT 遍历外,其他的几种方式它们的效率从高到低依次为:指针 > 迭代器 > 数组。在实际生产环境中,我们经常会用指针遍历的方式。
本文介绍的内容是对前面一篇文章内容的补充,它们都是 OpenCV 最基础的内容,接下来的文章会经常使用这些内容。本文还引申出了 LUT 以及图像像素值的统计, 特别是均值和标准差它们在图像预处理中经常用到。