从零开始的强化学习笔记1(结合书本与网上的多篇资料总结)
当我打开一个机械臂的强化学习教程:
让我们从零开始做一个机械手臂(强化学习) - 知乎 (zhihu.com)
发现其中使用了DDPG算法。由于没学习过DDPG,于是我打开了DDPG教程:
一文带你理清DDPG算法(附代码及代码解释) - 知乎 (zhihu.com)
发现作者建议我先去了解DQN算法,于是我打开一篇DQN教程:
三维可视化助你直观理解DQN算法[DQN理论篇] - 知乎 (zhihu.com)
文章表示DQN延续了一部分Qlearning的思路。于是我打开一篇Qlearning教程:
[理论篇]怎样直观理解Qlearning算法? - 知乎 (zhihu.com)
Qlearning中使用TD估算状态价值。什么是TD?
如何用时序差分TD估算状态V值? - 知乎 (zhihu.com)
TD是对蒙地卡罗(MC)算法的改进:
如何用蒙地卡罗方法(Monte-Carlo)估算V值? - 知乎 (zhihu.com)
还是要从基础学起。
马尔可夫决策过程
首先是马尔可夫决策过程,这里可理解为一个由原状态、动作和目标状态组成的三维矩阵:

当你处于一个源状态i时,就处于上图立方体中的一个面。将平面理解为如下的表格:

执行不同的动作,转换到下一个状态的概率也不同,转换到不同状态时所获得的奖励也不同。执行动作的概率则是由智能体的策略决定的。这就是强化学习的目标———找到获得奖励最大的最佳策略(也可以理解为训练智能体的最终目的)。
这里插一嘴,智能体可以通过选择不同的动作来决定下一状态的概率。但是一个动作对应的转换下一状态的概率是固定的,及采取动作A后转换到状态J、K、E、F、G的概率固定是0.1、0.1、0.5、0.1、0.2,这是由智能体所处的环境决定的(若要模拟具有丰富观察的复杂现实环境,其环境函数的建立非常困难,因此基于模型的方法往往用于确定性环境,例如有严格规则的棋盘游戏),但事实上我们并无法直接定义概率,而要通过智能体一次次地重复训练来获得数据,估计出合理的概率。这里涉及到后面对Q值和V值的估计。
Env函数
再顺便提一嘴,在强化学习库OpenAI Gym中。其环境类函数Env一般包含四个函数:
action_space:可执行动作的集合
observation_space:观察结果的集合
reset():重置环境
step():执行动作并返回其带来的后果信息。一般包含以下几项:
第一项是step()传递的参数(动作)。如step(0)表示执行动作0。
第二项observation表示执行完动作0后到达下一个状态,在此状态获得环境的新观察结果。
第三项reward表示这次动作收获的奖励。
第四项done是布尔指示符,表示episode是否结束(结束时为True)。
下一步,如何让智能体收获的奖励最大化?
首先要考虑未来。不能因为下一步执行动作A奖励最大就坚定的选择动作A。有可能A导致的新状态下执行所有动作都会扣奖励,那么回头去看动作A并不是最好的选择。最好能综合考虑未来的奖励收益来选择动作。
不能一次到达终点后就不再尝试,应多次尝试找到奖励最大的路径。
Q值和V值
这里引入新概念:Q值和V值。可以看一下教程:如何理解强化学习中的Q值和V值? - 知乎 (zhihu.com)
划重点:评估动作的价值,我们称为Q值:它代表了智能体选择这个动作后,一直到最终状态奖励总和的期望; - 评估状态的价值,我们称为V值:它代表了智能体在这个状态下,一直到最终状态的奖励总和的期望。
V值会根据不同的策略产生变化!(1)
与V值不同,Q值和策略并没有直接相关,而与环境的状态转移概率相关,而环境的状态转移概率是不变的。
一个状态的V值,就是这个状态下的所有动作的Q值,在策略下的期望。
折扣率 在强化学习中,有某些参数是人为主观制定。这些参数并不能推导,但在实际应用中却能解决问题,所以我们称这些参数为超参数,而折扣率就是一个超参数。 与金融产品说的贴现率是类似的。我们计算Q值,目的就是把未来很多步奖励,折算到当前节点。但未来n步的奖励的10点奖励,与当前的10点奖励是否完全等价呢?未必。所以我们人为地给未来的奖励一定的折扣,例如:0.9,0.8,然后在计算到当前的Q值。
蒙地卡罗(MC)和时序差分(TD)
那么如何计算每个状态节点和动作节点的价值呢?这里有两个方法:蒙地卡罗(MC)和时序差分(TD)。
蒙地卡罗算法可以理解为:智能体从某一个状态出发,经过多个状态后到达最终状态,这一路上记下每次的状态转移以及获得的奖励R。然后原路返回,在途经的每一个状态上标记这个状态的G值,G等于遇上一个状态的G值乘以一定的折扣再加上奖励r。智能体多次训练后,会经过同一个状态多次,而每次标记的该状态的G值是不一样的,取一个平均数,就是该状态的V值。
蒙地卡罗是基于无模型的算法,因为他不需要知道整个环境的模型,只需要一个劲的往前走就是了。
G值的意义在于某个状态到最终状态的奖励总和。策略不同,同一个状态的V值也会不同(1)。
蒙地卡罗的缺点在于,每次实验都需要智能体从最初状态到最终状态完整的走一遍。但如果状态空间非常大,有上万个状态,蒙地卡罗会浪费很多时间,计算量过大。这里就需要时序差分(TD)法了。
时序差分法可以理解为走一步看一步。将新状态当成最终状态,然后回过头去更新上一状态的V值。这一点可以从公式中看出区别。蒙地卡罗的更新公式:

时序差分法的更新公式如下:
![]()
可以看出蒙地卡罗需要这一时刻返回的G值(智能体已走完全程,原路返回到此状态时计算出的G值),而时序差分法只需要到下一状态时获得的回报Rt+1,也就是把状态t到状态t+1这一过程的回报当作G值,也就是把下一状态当最最终状态!然后每次到一个新的状态就回过头去更新所有之前状态的V值!
Qlearning 和 SARSA
以上两个算法都是用来估计状态节点的V值,为何不直接估算动作节点的Q值?本就是要让智能体选择奖励最大的动作。但是估算Q值还需要估算下一个状态的Vt+1值,这就非常麻烦了,能不能找到一个Q值来代替下一状态的Vt+1值?这里给出了两种替代方案:QLearning和SARSA。
SARSA用动作的Q值代替Vt+1。这里的动作是基于策略选取的,即依据策略的动作概率随机选取某一个动作。但既然我们的目标是让智能体获得最大的收益,为何不直接选取Q值最大的动作?这就是Qlearning的思路,直接选取Q值最大的那个动作的Q值来代替Vt+1。这两个方法之间就差一个Max。
深度强化学习(DQN、PG、Actor-Critic、PPO、DDPG)
到这里就出现了一个问题。智能体在训练过程中需要计算每个状态S和该状态在不同行为下所拥有的Q值,将这些信息以表格的方式存储起来。这种方式适用于离散型的状态问题,当面对连续型问题的时候,状态与动作的数量过大,用于存储的表格就会非常大,非常消耗计算机的内存。
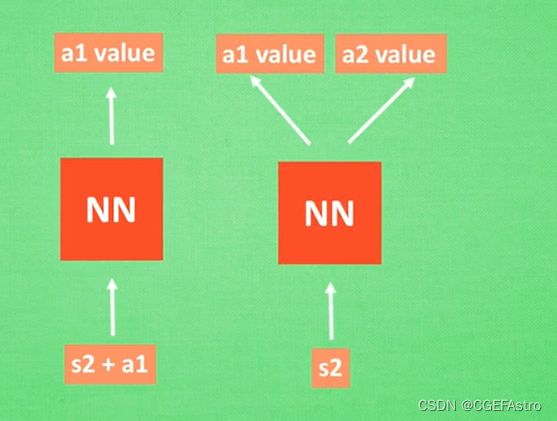
而神经网络,则非常适用于处理连续型状态问题,即线性回归(Linear Regression)。可以将神经网络视为一个函数,我们将当前状态与执行的动作作为输入,神经网络则输出对这个动作的Q值的预测。或是当前状态作为输入,神经网络输出不同动作对应的Q值。这样就不需要一个巨大的表格去存储信息,只需通过神经网络的计算就可以。
将神经网络引入QLearning算法,就得到了DQN算法——>Deep net Qlearning。这里开始就进入深度强化学习的领域了(深度学习与强化学习的结合)。
今天笔记先记到这里,欢迎大佬交流指导(ᕑᗢᓫ∗)˒
参考:
你有一份强化学习线路图,请查收。(原题:看我如何一文从马可洛夫怼到DPPO) - 知乎 (zhihu.com)
什么是 DQN | 莫烦Python (mofanpy.com)
什么是 Policy Gradients | 莫烦Python (mofanpy.com)
《深度强化学习入门与实践指南》——马克西姆·拉潘