在docker环境下从头搭建openvslam/orb_slam3的流程记录以及问题总结
文章目录
-
- 0. 前言
- 1. MobaXterm软件
- 2. docker操作
-
- 2.1. 拉一个ubuntu镜像
- 2.2. 修改名字(可选)
- 2.3. 删除之前的docker镜像(可选)
- 3. openvslam搭建流程
-
- 3.1. 起容器
- 3.2. 前置包的安装
- 3.3. 安装Eigen
- 3.4. 安装opencv
- 3.5. 安装DBoW2
- 3.6. 安装g2o
- 3.7. 安装Pangolin库
- 3.8. 安装yaml-cpp (可选)
- 3.9. 安装openvslam
- 3.10. 安装openssh
- 3.11. MobaXterm软件远程连接容器
- 3.12. 运行demo
- 4. orb_slam3搭建流程
-
- 4. 1. 起容器
- 4.2. 前置包的安装
- 4.3. 安装Eigen
- 4.4. 安装opencv
- 4.5. 安装Pangolin库
- 4.6. 安装bosst库
- 4.7. 安装DBoW2
- 4.8. 安装g2o
- 4.9. 安装Sophus
- 4.10. 解压ORBvoc.txt.tar.gz压缩包
- 4.11. 安装orb_slam3
- 4.12. 安装openssh
- 4.13. MobaXterm软件远程连接容器
- 4.14. 运行demo
- 5. 编译问题
-
- 5.1 MobaXterm相关问题
-
- 5.1.1 问题1:报错显示 “xclock command not found”:
- 5.1.2 问题2:报错显示 "Error: Can't open this Distplay"
- 5.1.3 问题3:报错显示 "error: XDG RUNTIME DIR not set in environment"
- 5.2 编译问题
-
- 5.2.1 问题1:报错显示 "No rule to make target '/usr/lib/x86_64-linux-gnu/libjpeg.so', needed by 'src/libpangolin.so'. Stop"
- 5.2.2 问题2:报错显示 "fatal error: openssl/md5.h: No such file or directory"
- 5.2.3 问题3:报错显示 "cannot find -lboost_serialization"
- 5.3. 之前遇到的编译问题
-
- 5.3.1 问题1:报错显示 "Could not find the following static Boost libraries"
- 5.3.2 问题2:报错显示 "/usr/bin/ld: cannot find -lboost_system-mt"
- 5.3.3 问题3:报错显示 "//data/casia_mosaic_liyi_linux/src/siftgpu_extractor/SiftGPU/bin/libsiftgpu.so: undefined reference to `[email protected]"
- 5.3.4 问题4:报错显示 "//data/casia_mosaic_liyi_linux/src/siftgpu_extractor/SiftGPU/bin/libsiftgpu.so: undefined reference to `ilGetIntege"
- 5.3.5 问题5:报错显示 "//data/casia_mosaic_liyi_linux/src/siftgpu_extractor/SiftGPU/bin/libsiftgpu.so: undefined reference to `std::__cxx11::basic_ostringstream
>::basic_ostringstream()@GLIBCXX_3.4.26" - 5.3.6 问题6:报错显示 "//data/casia_mosaic_liyi_linux/src/siftgpu_extractor/SiftGPU/bin/libsiftgpu.so: undefined reference to `log@GLIBC_2.29"
- 5.3.7 问题7:报错显示 "apt-file not found"
- 5.3.8 问题8:报错显示 "ld.so.conf: No such file or directory"
0. 前言
最近基于公司的需求,开始搭建Slam算法。在搭建Slam算法的过程中,我遇到了很多问题。为了方便后续的重复部署以及给读者朋友做一个参考,因此,我记录了在服务器上通过docker搭建openvslam以及orb_slam3的全部过程,并且整理了遇到的编译问题。
本文主要内容如下:
第一部分:MobaXterm软件
第二部分:docker操作
第三部分:openvslam搭建流程
第四部分:orb_slam3搭建流程
第五部分:编译问题
参考博客:
- github:zm0612,名称:openvslam-comments
- 作者:一点儿也不萌的萌萌,开源SLAM框架学习——OpenVSLAM源码解析: 第一节 安装和初探
- openvslam论文链接
- github:UZ-SLAMLab,名称:ORB_SLAM3
- 作者:抓饼先生,Boost笔记 1:下载、编译、安装、测试
- How to fix: fatal error: openssl/opensslv.h: No such file or directory in RedHat 7
- 在Ubuntu上安装C++库
- 【视频开发】【计算机视觉】doppia编译之四:安装其他库、编译和运行doppia
- 运行应用程序时出现GLIBCXX_3.4.26not found问题
- wsl2中安装QGC
1. MobaXterm软件
本次部署因为是在远程服务器上,无法在命令行窗口显示Slam的定位和建图过程。因此,采用带有Xserver的MobaXterm软件。该软件可以通过Xserver服务来可视化服务器上的图形化窗口。
第一步,建立你的session:
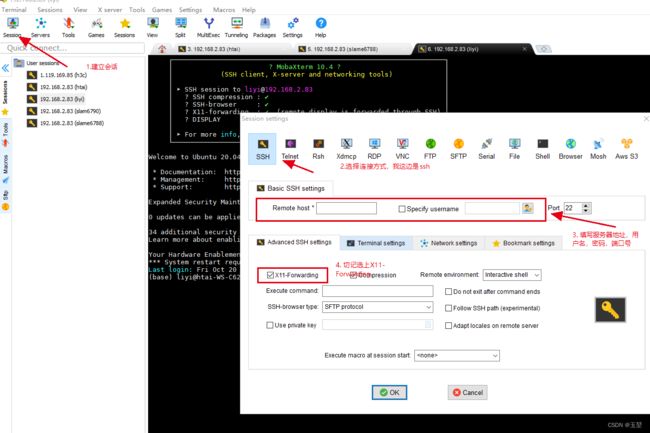
第二步,测试可视化显示
输入xclock或者xeyes查看是否可以可视化显示:


在可视化窗口时,遇到问题可以查看第5章节中是否存在解决方法,如果依旧没有解决可以在评论区提出,我们一起解决。
2. docker操作
2.1. 拉一个ubuntu镜像
sudo docker pull ubuntu:18.04
2.2. 修改名字(可选)
我个人喜欢把镜像重命名一下,方便管理。
注意:不是把原始镜像重命名,而是重新生成一个新的镜像
sudo docker tag f9a80a55f492 liyi_cpp:1.0
# f9a80a55f492 是ubuntu:18.04的镜像编号。
# liyi_cpp:1.0是重命名的名字和版本号。
2.3. 删除之前的docker镜像(可选)
sudo docker rmi ubuntu:18.04
3. openvslam搭建流程
OpenvSlam的官方仓库已经关闭,但是github作者:zm0612 已经fork下来可以继续进行安装。
该作者还有一个csdn的博客进行安装说明,我就是参考的这个博主的内容进行整理的。
读者朋友也可以参考这个博主的文章:
作者:一点儿也不萌的萌萌,开源SLAM框架学习——OpenVSLAM源码解析: 第一节 安装和初探
openvslam的环境包含以下安装包:
- Eigen:用于矩阵运算。
- g2o: 用于优化基于图的非线性误差函数。
- SuiteSparse: 一组与稀疏矩阵相关的包。
- DBoW2:用于图像检索的词袋图像数据库。
- yaml-cpp:yaml文件管理的包。(可选)
- OpenCV:数字图像处理的包。
- Pangolin:用于可视化显示的包。
这些包我已经提前下好了,放在百度云中,读者朋友可以自行下载
链接:https://pan.baidu.com/s/1wT95r1iJFwyVg8vhPbcGtQ
提取码:1234
3.1. 起容器
基于之前拉取的镜像,起一个容器。
sudo docker run --name openvslam -v /media/DATA/liyi/project/vscode:/data -p 6790:22 --gpus=all -it liyi_cpp:1.0 /bin/bash
# --name 后面是容器名字
# -v 指的是本地目录和容器目录的映射关系
# -p 指的是容器开放的端口的映射
# --gpus 指的是容器可以调用nvidia的gpu。all指的是全部的显卡
# -it 后面跟着镜像的名字和版本号
3.2. 前置包的安装
基于基础使用以及依赖库,需要提前安装一些包。代码如下:
sudo apt update -y
apt upgrade -y --no-install-recommends
# basic dependencies
apt install -y build-essential pkg-config cmake git wget curl unzip vim
# g2o dependencies
apt install -y libatlas-base-dev libsuitesparse-dev
# OpenCV dependencies
apt install -y libgtk-3-dev
apt install -y ffmpeg
apt install -y libavcodec-dev libavformat-dev libavutil-dev libswscale-dev libavresample-dev
# eigen dependencies
apt install -y gfortran
# other dependencies
apt install -y libyaml-cpp-dev libgoogle-glog-dev libgflags-dev
# (if you plan on using PangolinViewer)
# Pangolin dependencies
apt install -y libglew-dev
# 用来读取jpeg图像的包。
apt install -y libjpeg
3.3. 安装Eigen
cd /path/to/working/dir(工作路径)
# 版本也可以自己指定。eigen也可以通过我的百度云离线下载好,自己解压。
wget -q http://bitbucket.org/eigen/eigen/get/3.3.4.tar.bz2
tar xf 3.3.4.tar.bz2
rm -rf 3.3.4.tar.bz2
cd eigen-eigen-5a0156e40feb
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
sudo make install
安装好后,include文件和lib文件,分别在/usr/local/include和/usr/local/lib下。

3.4. 安装opencv
cd /path/to/working/dir
# 版本也可以自己指定。
wget -q https://github.com/opencv/opencv/archive/3.4.0.zip
unzip -q 3.4.0.zip
rm -rf 3.4.0.zip
cd opencv-3.4.0
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local -DENABLE_CXX11=ON -DBUILD_DOCS=OFF -DBUILD_EXAMPLES=OFF -DBUILD_JASPER=OFF -DBUILD_OPENEXR=OFF -DBUILD_PERF_TESTS=OFF -DBUILD_TESTS=OFF -DWITH_EIGEN=ON -DWITH_FFMPEG=ON -DWITH_OPENMP=ON ..
make -j4
sudo make install
安装好后,include文件和lib文件,分别在/usr/local/include和/usr/local/lib下。

3.5. 安装DBoW2
cd /path/to/working/dir
git clone https://github.com/shinsumicco/DBoW2.git
cd DBoW2
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
sudo make install
安装好后,include文件和lib文件,分别在/usr/local/include和/usr/local/lib下。
3.6. 安装g2o
cd /path/to/working/dir
# 可以自己在github上体现下载好。
git clone https://github.com/RainerKuemmerle/g2o.git
cd g2o
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local -DCMAKE_CXX_FLAGS=-std=c++11 -DBUILD_SHARED_LIBS=ON -DBUILD_UNITTESTS=OFF -DBUILD_WITH_MARCH_NATIVE=ON -DG2O_USE_CHOLMOD=OFF -DG2O_USE_CSPARSE=ON -DG2O_USE_OPENGL=OFF -DG2O_USE_OPENMP=ON ..
make -j4
sudo make install
安装好后,include文件和lib文件,分别在/usr/local/include和/usr/local/lib下。

3.7. 安装Pangolin库
cd /path/to/working/dir
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
git checkout ad8b5f83222291c51b4800d5a5873b0e90a0cf81
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
sudo make install
安装好后,include文件和lib文件,分别在/usr/local/include和/usr/local/lib下。

3.8. 安装yaml-cpp (可选)
执行以下命令:
git clone https://github.com/jbeder/yaml-cpp
cd yaml-cpp
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
sudo make install
3.9. 安装openvslam
DCMAKE_BUILD_TYPE可以根据需求选择Release或者Debug。
cd /path/to/openvslam
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Debug -DBUILD_WITH_MARCH_NATIVE=ON -DUSE_PANGOLIN_VIEWER=ON -DUSE_SOCKET_PUBLISHER=OFF -DUSE_STACK_TRACE_LOGGER=ON -DBOW_FRAMEWORK=DBoW2 -DBUILD_TESTS=ON ..
make -j4
3.10. 安装openssh
#下载openssh
apt-get update
apt-get install openssh-server
# 设置root密码,然后设置两遍相同的密码,之后登陆的时候要用到
passwd
# 修改配置文件
apt-get install vim
vim /etc/ssh/sshd_config
# 注释掉 PermitRootLogin prohibit-password 这一行 添加这一行 PermitRootLogin yes
# 5. 重启ssh服务
service ssh restart
# 或使用
# /etc/init.d/ssh restart
# 本机连接ssh
# ssh -p 6789 [email protected]
# 远程访问服务器docker里正在运行的容器
# ssh -p 6790 [email protected]
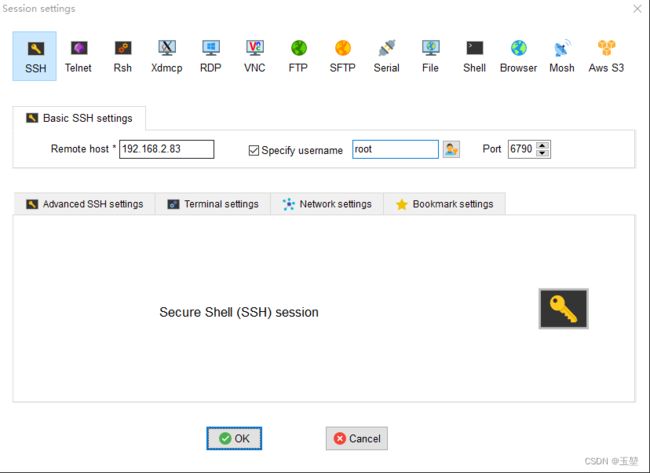
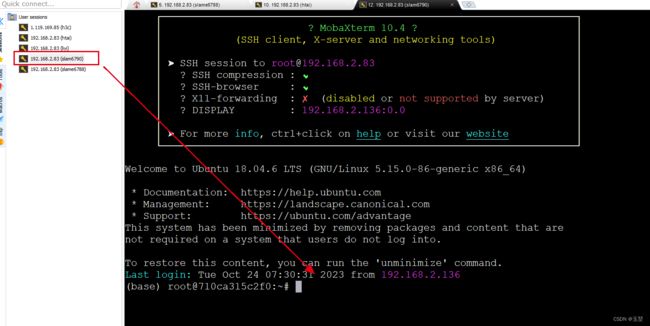
3.11. MobaXterm软件远程连接容器
和之前的方法一样,配置远程服务器的会话。注意端口是起容器时设置的端口号,在上述例子中为6790。
3.12. 运行demo
cd slam编译所在位置/build
./run_euroc_slam -v /data/database/orb_vocab.dbow2 -d /data/database/EuRoC/V1_03_difficult/mav0 -c ../example/euroc/EuRoC_mono.yaml
# -v orb_vocab.dbow2的文件路径。可以在网上下载,或者通过我的百度云分享下载。
# -d 数据的所在路径
# -c 相机的配置文件

4. orb_slam3搭建流程
orb_slam3的github代码:github:UZ-SLAMLab,名称:ORB_SLAM3
orb_slam不用自己找第三方库,代码里面就自带各种三方库。(缺一个boost_1_83_0,需要自己下载。)

openvslam的环境包含以下安装包:
- Eigen:用于矩阵运算。
- g2o: 用于优化基于图的非线性误差函数。
- Sophus: 这是一个李群的c++实现,通常用于二维和三维几何问题(即计算机视觉或机器人应用)。
- DBoW2:用于图像检索的词袋图像数据库。
- OpenCV:数字图像处理的包。
- Pangolin:用于可视化显示的包。
- boost:Boost库是为C++语言标准库提供扩展的一些C++程序库的总称。
搭建流程如下:
4. 1. 起容器
sudo docker run --name orb_slam3 -v /media/DATA/liyi/project/vscode:/data -p 6788:22 --gpus=all -it liyi_cpp:1.0 /bin/bash
# --name 后面是容器名字
# -v 指的是本地目录和容器目录的映射关系
# -p 指的是容器开放的端口的映射
# --gpus 指的是容器可以调用nvidia的gpu。all指的是全部的显卡
# -it 后面跟着镜像的名字和版本号
4.2. 前置包的安装
基于基础使用以及依赖库,需要提前安装一些包。代码如下:
sudo apt update -y
apt upgrade -y --no-install-recommends
# basic dependencies
apt install -y build-essential pkg-config cmake git wget curl unzip vim
# g2o dependencies
apt install -y libatlas-base-dev libsuitesparse-dev
# OpenCV dependencies
apt install -y libgtk-3-dev
apt install -y ffmpeg
apt install -y libavcodec-dev libavformat-dev libavutil-dev libswscale-dev libavresample-dev
# eigen dependencies
apt install -y gfortran
# other dependencies
apt install -y libyaml-cpp-dev libgoogle-glog-dev libgflags-dev
# (if you plan on using PangolinViewer)
# Pangolin dependencies
apt install -y libglew-dev
# 用来读取jpeg图像的包。
apt install -y libjpeg
4.3. 安装Eigen
cd orb_slam3代码所在路径/Thirdparty_add/eigen-git-mirror
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
sudo make install
4.4. 安装opencv
cd orb_slam3代码所在路径/Thirdparty_add/opencv-4.8.0
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local -DENABLE_CXX11=ON -DBUILD_DOCS=OFF -DBUILD_EXAMPLES=OFF -DBUILD_JASPER=OFF -DBUILD_OPENEXR=OFF -DBUILD_PERF_TESTS=OFF -DBUILD_TESTS=OFF -DWITH_EIGEN=ON -DWITH_FFMPEG=ON -DWITH_OPENMP=ON ..
make -j4
sudo make install
4.5. 安装Pangolin库
cd orb_slam3代码所在路径/Thirdparty_add/Pangolin
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
sudo make install
4.6. 安装bosst库
cd orb_slam3代码所在路径/Thirdparty_add/boost_1_83_0
sh bootstrap.sh
./b2
./b2 --clean
./b2 install
参考博客流程:作者:抓饼先生,Boost笔记 1:下载、编译、安装、测试
4.7. 安装DBoW2
cd orb_slam3代码所在路径/Thirdparty/DBoW2
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
sudo make install
4.8. 安装g2o
cd orb_slam3代码所在路径/Thirdparty/g2o
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local -DCMAKE_CXX_FLAGS=-std=c++11 -DBUILD_SHARED_LIBS=ON -DBUILD_UNITTESTS=OFF -DBUILD_WITH_MARCH_NATIVE=ON -DG2O_USE_CHOLMOD=OFF -DG2O_USE_CSPARSE=ON -DG2O_USE_OPENGL=OFF -DG2O_USE_OPENMP=ON ..
make -j4
sudo make install
4.9. 安装Sophus
cd orb_slam3代码所在路径/Thirdparty/Sophus
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
make install
4.10. 解压ORBvoc.txt.tar.gz压缩包
cd orb_slam3代码所在路径/Vocabulary
tar -xf ORBvoc.txt.tar.gz
4.11. 安装orb_slam3
DCMAKE_BUILD_TYPE可以根据需求选择Release或者Debug。
cd orb_slam3代码所在路径
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j4
我的docker环境为:

4.12. 安装openssh
#下载openssh
apt-get update
apt-get install openssh-server
# 设置root密码,然后设置两遍相同的密码,之后登陆的时候要用到
passwd
# 修改配置文件
apt-get install vim
vim /etc/ssh/sshd_config
# 注释掉 PermitRootLogin prohibit-password 这一行 添加这一行 PermitRootLogin yes
# 5. 重启ssh服务
service ssh restart
# 或使用
# /etc/init.d/ssh restart
# 本机连接ssh
# ssh -p 6789 [email protected]
# 远程访问服务器docker里正在运行的容器
# ssh -p 6790 [email protected]
4.13. MobaXterm软件远程连接容器
和之前的方法一样,配置远程服务器的会话。注意端口是起容器时设置的端口号,在上述例子中为6788。


4.14. 运行demo
cd slam编译所在位置/build
../Examples/Monocular/mono_euroc ../Vocabulary/ORBvoc.txt ../Examples/Monocular/EuRoC.yaml /data/database/EuRoC/V1_03_difficult ../Examples/Monocular/EuRoC_TimeStamps/V103.txt test
# 第一个参数是ORBvoc.txt的路径
# 第二个参数是箱子配置参数的路径
# 第三个参数是数据的路径
# 第四个参数是时间戳txt文件的路径
# 第五个轨迹文件名

5. 编译问题
5.1 MobaXterm相关问题
5.1.1 问题1:报错显示 “xclock command not found”:

解决:
x11的包没有安装,需要通过下属代码进行安装:
sudo apt-get update
sudo apt-get install x11-apps
5.1.2 问题2:报错显示 “Error: Can’t open this Distplay”

解决:
这是找不到显示的服务器,需要添加服务器的地址和端口号。
首先,编辑环境变量:
vim ~/.bashrc
添加显示服务器地址和端口号:
# 例如我的
export DISPLAY=192.168.2.136:0.0
再刷新环境变量:
source ~/.bashrc
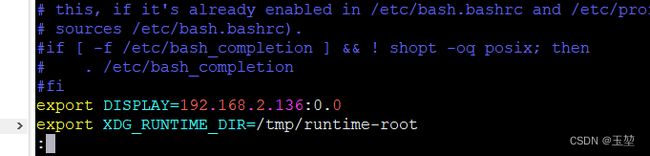
5.1.3 问题3:报错显示 “error: XDG RUNTIME DIR not set in environment”
![]() 解决:
解决:
XDG运行的缓存没有地方存储,需要设置存放目录。
首先,编辑环境变量:
vim ~/.bashrc
添加显示服务器地址和端口号:
# 例如我的
export XDG_RUNTIME_DIR=/tmp/runtime_root
再刷新环境变量:
source ~/.bashrc
5.2 编译问题
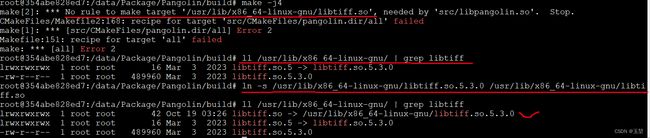
5.2.1 问题1:报错显示 “No rule to make target ‘/usr/lib/x86_64-linux-gnu/libjpeg.so’, needed by ‘src/libpangolin.so’. Stop”
make[2]: *** No rule to make target '/usr/lib/x86_64-linux-gnu/libjpeg.so', needed by 'src/libpangolin.so'. Stop.
CMakeFiles/Makefile2:168: recipe for target 'src/CMakeFiles/pangolin.dir/all' failed
make[1]: *** [src/CMakeFiles/pangolin.dir/all] Error 2
Makefile:151: recipe for target 'all' failed
make: *** [all] Error 2
libpangolin.so需要libjpeg.so文件,但是libjpeg.so不存在。
解决方法:
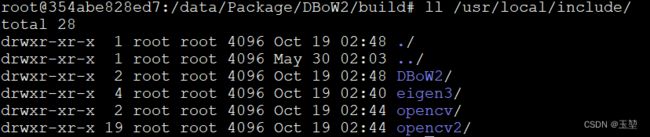
- 先查看/usr/lib/x86_64-linux-gnu/libjpeg.so是否存在,没有的话则重新下载:
apt install -y libjpeg
如果存在,但是名称不一样。如下图:
![]() 则可以进行软连接。
则可以进行软连接。
ln -s /usr/lib/x86_64-linux-gnu/libjpeg.so.8 /usr/lib/x86_64-linux-gnu/libjpeg.so
# 第一个是源文件。
# 第二个是软连接生成的文件。

其他包也同理:
5.2.2 问题2:报错显示 “fatal error: openssl/md5.h: No such file or directory”

没有下载openssl
解决方法:
sudo apt-get install libssl-dev
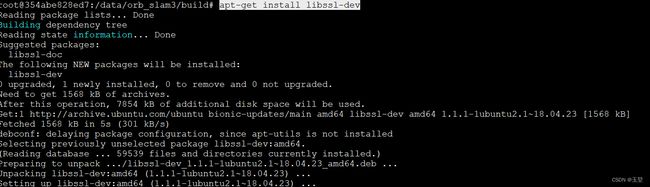
解决方法引用自How to fix: fatal error: openssl/opensslv.h: No such file or directory in RedHat 7
5.2.3 问题3:报错显示 “cannot find -lboost_serialization”

该docker没有lboost_serialization库,需要下载boost库。
解决方法:
之前文章中介绍过boost库的下载方法。如下:
cd orb_slam3代码所在路径/Thirdparty_add/boost_1_83_0
sh bootstrap.sh
./b2
./b2 --clean
./b2 install
解决方法引用自作者:抓饼先生,Boost笔记 1:下载、编译、安装、测试
5.3. 之前遇到的编译问题
我之前编译siftgpu遇到的问题,和本文章相关不大,只是总结在这,方便我后续查看。
5.3.1 问题1:报错显示 “Could not find the following static Boost libraries”
Could not find the following static Boost libraries
boost_system
boost_filesystem
boost_thread
boost_date_time
boost_chrono
boost_regex
boost_serialization
boost_program_options
解决方法:
apt install libboost-all-dev
5.3.2 问题2:报错显示 “/usr/bin/ld: cannot find -lboost_system-mt”
/usr/bin/ld: cannot find -lboost_program_options-mt
/usr/bin/ld: cannot find -lboost_filesystem-mt
/usr/bin/ld: cannot find -lboost_system-mt
/usr/bin/ld: cannot find -lboost_thread-mt
这里出现错误的原因,是boost库链接出错,这时候我们需要修改CMakeList.txt文件,这里我就直接把CMakeList.txt贴出来,修改的地方做过注释。
解决方法:
【视频开发】【计算机视觉】doppia编译之四:安装其他库、编译和运行doppia
在错误四:

5.3.3 问题3:报错显示 “//data/casia_mosaic_liyi_linux/src/siftgpu_extractor/SiftGPU/bin/libsiftgpu.so: undefined reference to `[email protected]”
解决方法:
没有libcudart.so.11.0,请安装cuda,并配置cuda环境。
5.3.4 问题4:报错显示 “//data/casia_mosaic_liyi_linux/src/siftgpu_extractor/SiftGPU/bin/libsiftgpu.so: undefined reference to `ilGetIntege”
undefined reference to `ilInit'
undefined reference to `ilGenImages'
undefined reference to `ilBindImage'
undefined reference to `ilLoadImage'
undefined reference to `ilGetInteger'
undefined reference to `ilGetInteger'
undefined reference to `ilGetInteger'
undefined reference to `ilGetInteger'
解决方法:
安装 devil库
在Ubuntu上安装C++库
sudo apt-get install libdevil1c2 libdevil-dev
apt-file show libdevil1c2
libdevil1c2: /usr/bin/ilur
libdevil1c2: /usr/lib/libIL.so.1
libdevil1c2: /usr/lib/libIL.so.1.1.0
libdevil1c2: /usr/lib/libILU.so.1
libdevil1c2: /usr/lib/libILU.so.1.1.0
libdevil1c2: /usr/lib/libILUT.so.1
libdevil1c2: /usr/lib/libILUT.so.1.1.0
libdevil1c2: /usr/share/doc/libdevil1c2/changelog.Debian.gz
libdevil1c2: /usr/share/doc/libdevil1c2/copyright
libdevil1c2: /usr/share/lintian/overrides/libdevil1c2\
5.3.5 问题5:报错显示 “//data/casia_mosaic_liyi_linux/src/siftgpu_extractor/SiftGPU/bin/libsiftgpu.so: undefined reference to `std::__cxx11::basic_ostringstream::basic_ostringstream()@GLIBCXX_3.4.26”
解决:
libstdc++.so.6.0.25中不包含GLIBCXX的3.4.26版本,因此需要下载libstdc++.so.6.0.26,然后重新软连接到libstdc++.so.6
一般libstdc++都在/usr/lib64中,但是我在docker中为/usr/lib/x86_64-linux-gnu
参考:运行应用程序时出现GLIBCXX_3.4.26not found问题
5.3.6 问题6:报错显示 “//data/casia_mosaic_liyi_linux/src/siftgpu_extractor/SiftGPU/bin/libsiftgpu.so: undefined reference to `log@GLIBC_2.29”
解决方法:
检查/usr/lib/x86_64-linux-gnu/libc.so,看看是否存在或者,兼容GLIBC_2.29.
检查命令:
strings /lib/x86_64-linux-gnu/libc.so.6 | grep GLIBC_
没有lib.so,则安装glibc-2.29,并进行安装和编译
cd glibc-build
../glibc-2.29/configure --prefix=/usr/lib/glibc-2.29
make -j8
make install
然后进行软连接:
ln -sf /usr/lib/glibc-2.29/lib/libm-2.29.so libm.so.6
参考博客:wsl2中安装QGC
缺失bison和gawk,或者bison和gawk的版本过低。
解决办法:
更新文件 gawk 和 bison
命令为:
sudo apt-get install gawk
sudo apt-get install bison
然后libsiftgpu.so的重新编译生成。在SiftGPU下进行编译。
用ldd /bin/libsiftgpu.so来进行测试。
参考博客:SiftGPU在Ubuntu和Windows下的编译与使用
5.3.7 问题7:报错显示 “apt-file not found”
解决:
sudo apt-get update
sudo apt-get install apt-file
sudo apt-file update
5.3.8 问题8:报错显示 “ld.so.conf: No such file or directory”
在指定位置建立ld.so.conf
mkdir -p $prefix/etc
touch $prefix/etc/ld.so.conf
参考博客:ld.so.conf: No such file or directory