编写虚拟UART驱动程序-框架
一、框架回顾

二、编写UART驱动要做的事
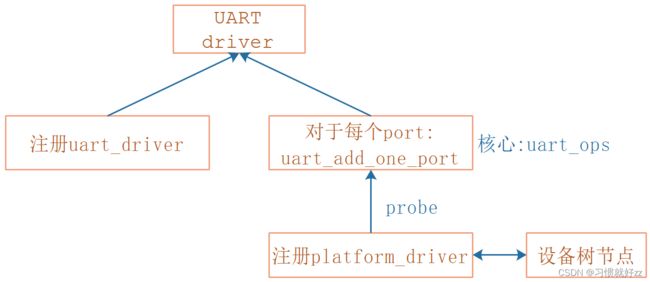
1.注册一个uart_driver
2. 对于每一个port,都会在设备树里面有一个节点
3. 设备树里的节点和platform_driver节点匹配
4. 当platform_dirver的probe函数被调用时,可以获得设备树里的信息,从而把每个串口设置成对应的uart_driver
三、虚拟的UART

为了做实验,我们还要创建一个虚拟文件:/proc/virt_uart_buf
- 要发送数据给虚拟串口时,执行:
echo "xxx" > /proc/virt_uart_buf - 要读取虚拟串口的数据时,执行:
cat /proc/virt_uart_buf
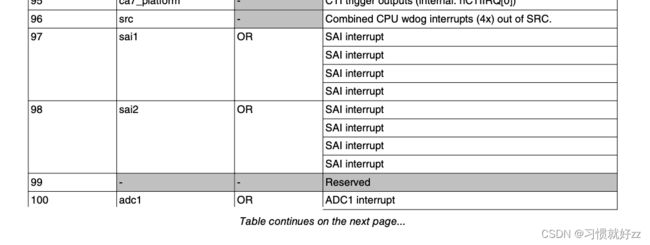
虚拟串口需要有接收中断(写入buff时),查看6ull的手册,第三章中断中,使用99是可157里面一样是保留的。
编写代码的思路:
在platform_driver的probe函数里,需要设置uart_port(提供uart_ops),然后注册uart_port
uart_ops需要提供设置串口的信息,需要设置读数据,需要设置写输入的方法
四、编程
4.1 编写设备树
/ {
virtual_uart: virtual_uart_100ask {
compatible = "100ask,virtual_uart";
interrupt-controller;
#interrupt-cells = <2>;
interrupt-parent = <&intc>;
interrupts = <GIC_SPI 99 IRQ_TYPE_LEVEL_HGIH>;
};
};
4.2 编写uart_driver
4.3 编写platform_driver
#include