FOC控制中电流的采样
摘要
本篇笔记主要记录基于恩智浦MPC5744P的电机FOC控制中电流的采样。。
准备工作
安装S32DS for PA, 因为我们在S32DS下开发MPC5744P。
安装S32DS 的SDK, 我们使用最新版3.0.3
ADC
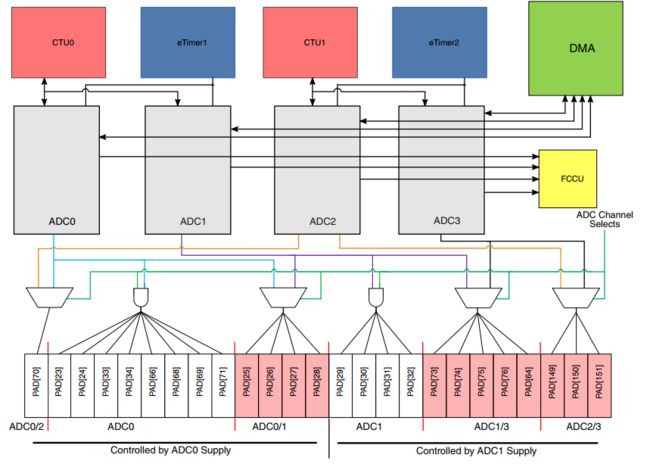
恩智浦的MPC5744P,含有的ADC子模块有四个,我们使用ADC0的通道0,和ADC1的通道0来做电流的同步采样,通过PWM触发CTU,CTU事件触发ADC电流采样,在CTU的中断中去获取电流的ADC值,经过滤波后就可以做电流算法的闭环控制,这个芯片的ADC 有两种模式。
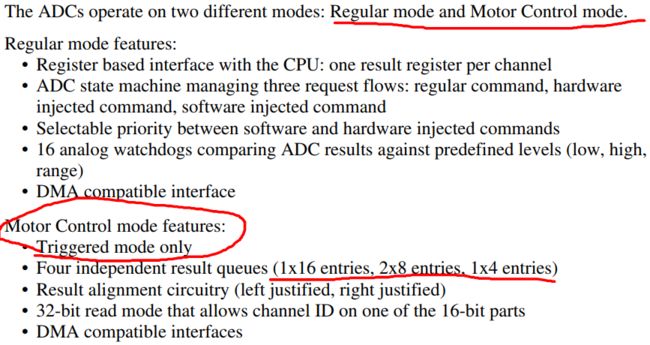

我们使用电机控制模式,使用内部集成的CTU去触发ADC转换。也可以采用etimer去触发ADC,这次我们采用CTU触发,配置ADC,CTU时钟为80M.
CTU
CTU的利用可以减少CPU的负担,具体的描述可以参考手册下面的描述
CTU框图
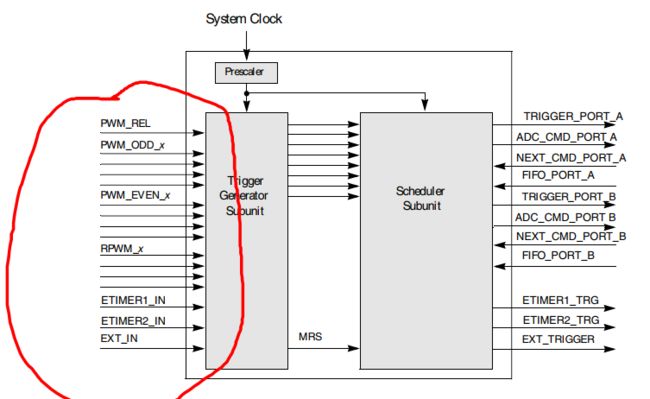

因为做电机控制,电流的同步采样非常关键,根据这个框图可以看到,PWM的重装载可以作为触发CTU,CTU产生ADC命令请求去ADC转换。CTU操作的模式有触发模式和顺序模式。我们采用触发模式。
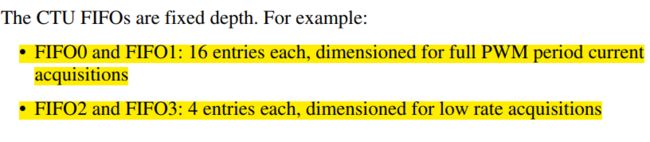
这里需要注意的是CTU的FIFO是不同的,0和1用来做快速采样,而2和3用来配置作为低速采样。
配置和开发
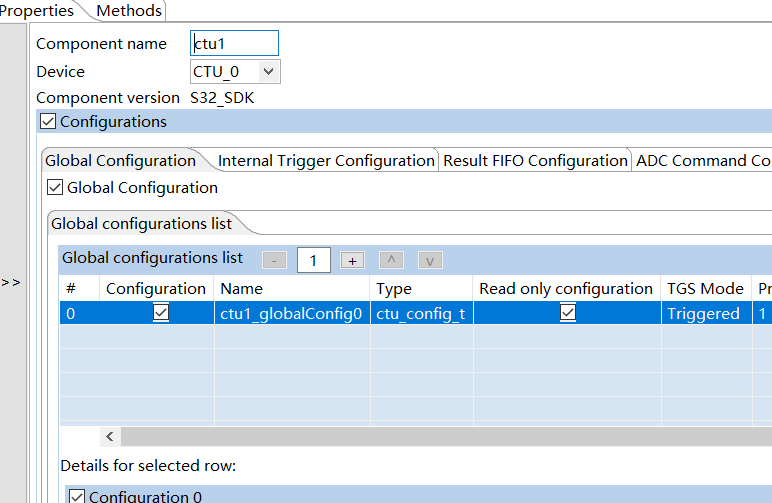
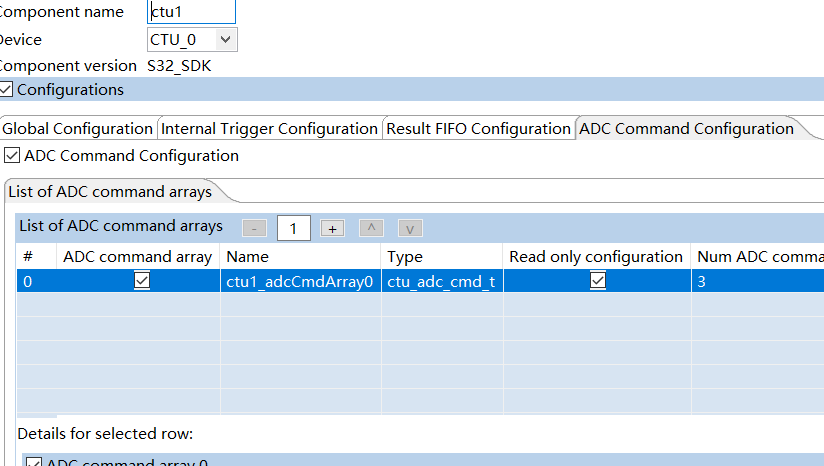
在S32DS开发环境中配置CTU和ADC,
ADC配置
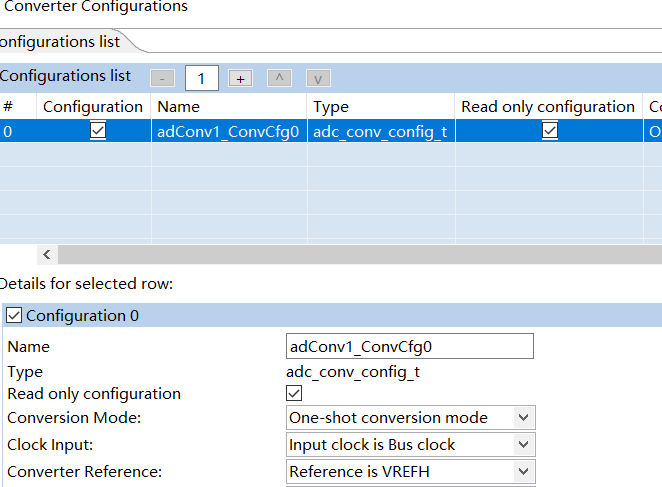
更多参数的配置请参考收据手册,这个需要认真阅读手册配置,可以参考例程。配置完成后,生成驱动,如果没有错的话,我们这里需要完成CTU的中断去获取ADC值。
驱动添加
需要初始化ADC和CTU,添加相应的代码,使用生成的配置结构体
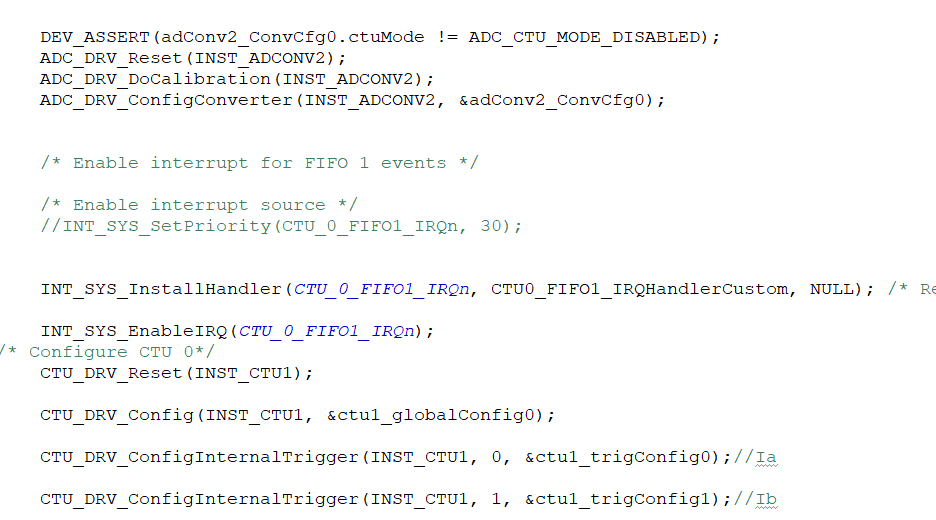
然后还需要完成CTU的中断,
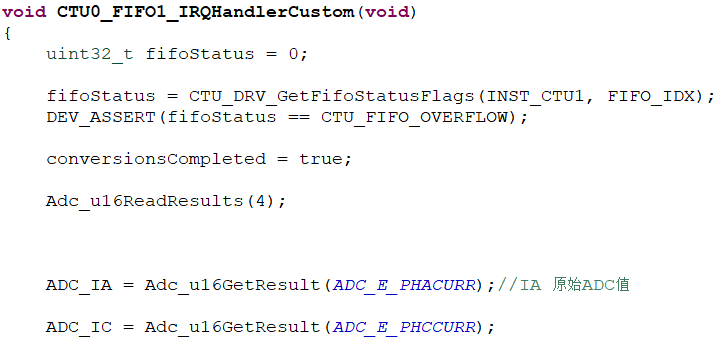
转换结果的获取有两种API, 可以根据自己需要选择,第一种API
/*FUNCTION**********************************************************************
*
* Function Name : CTU_DRV_GetConvData
* Description : This function returns the conversion data result aligned according
* to the alignment parameter.
*
* Implements : CTU_DRV_GetConvData_Activity
* END**************************************************************************/
uint16_t CTU_DRV_GetConvData(const uint32_t instance, const uint32_t fifoIdx, ctu_data_align_t alignment)
第二种API
/*FUNCTION**********************************************************************
*
* Function Name : CTU_DRV_GetConvResult
* Description : This function gets the full conversion result information, with
* the conversion data aligned according to the alignment parameter.
*
* Implements : CTU_DRV_GetConvResult_Activity
* END**************************************************************************/
void CTU_DRV_GetConvResult(const uint32_t instance, const uint32_t fifoIdx, const ctu_data_align_t alignment, ctu_conv_result_t * const result)
两种都可以正确获取到ADC值,获取到原始值以后还需要做一些滤波来处理,这些流给大家去实现,因为你的应用不一样,可能采取的滤波算法也不一样。有时候还需要采用多种滤波算法实现对不同干扰的抗扰能力。
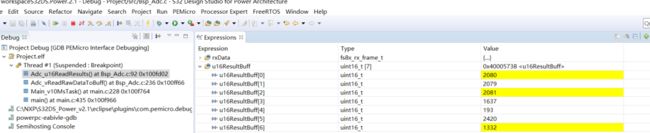
测试
添加完代码,没有问题后就可以编译下载到板子上调试观察,可以看到,正确实现了电流的多路采样,可以采集多组值,测量下这里就给大家简单观察下打断点采集到的结果。
同时CTU还有其他一些触发源,大家也可以实验一下,也可以软件触发。但在电机控制中,为了达到同步和快速的电流采样,都是用触发同步采样,提供给算法实施闭环控制。有兴趣的可以多研究研究。
