【luckfox】添加压力传感器hx711
文章目录
- 前言
- 一、参考资料
- 二、电路图
- 三、驱动
- 四、makefile——添加驱动
- 五、dts——使能gpio
-
- 5.1 参考
- 5.2 改动1—— hx117节点
- 5.3 改动2——引脚节点
- 5.4 已经被定义的引脚
- 5.5 gpio源码
- 六、改动总结——使能hx711
- 七、验证驱动添加
- 八、编写测试文件
-
- 8.1 测试代码
- 8.2 配置编译环境变量
- 九、验证
- 十、其他——添加文件路径
- 小结
前言
本章介绍基于luckfox开发板添加压力传感器hx711,并编写测试
一、参考资料
Rockchip_RV1103_Datasheet_V1.1-20220427.pdf
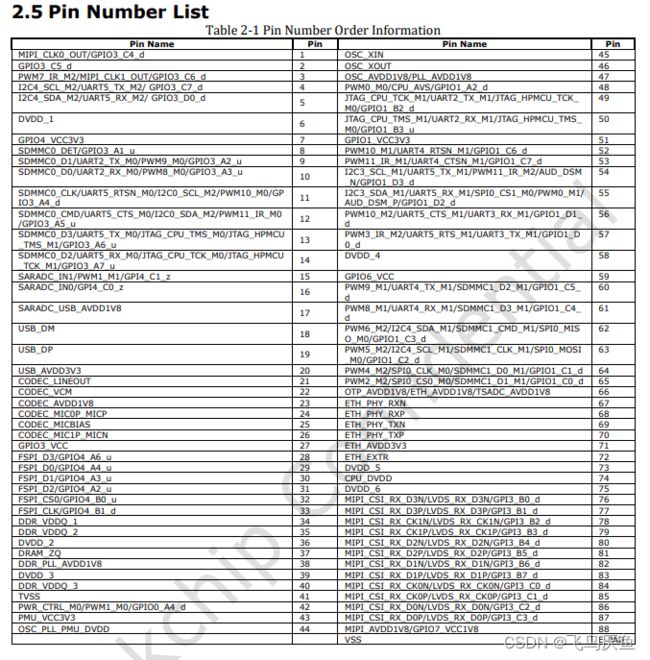
二、电路图
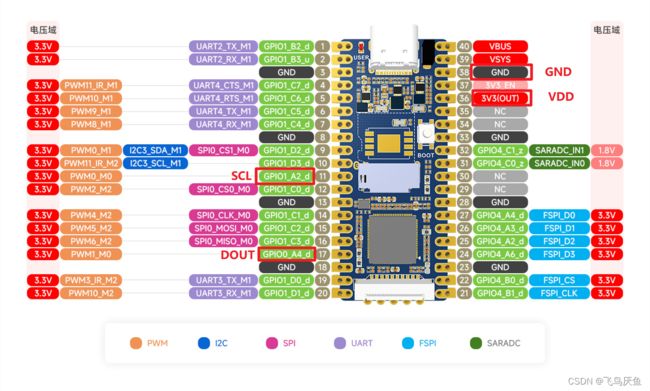
只有这两个io口没有复用其他功能,需要关掉PWM0_0/1_0。
三、驱动
luckfox-pico-main\sysdrv\source\kernel\drivers\iio\adc\hx711.c
这里匹配gpio
static int hx711_probe(struct platform_device *pdev)
{
/*
* PD_SCK stands for power down and serial clock input of HX711
* in the driver it is an output
*/
hx711_data->gpiod_pd_sck = devm_gpiod_get(dev, "sck", GPIOD_OUT_LOW);
if (IS_ERR(hx711_data->gpiod_pd_sck)) {
dev_err(dev, "failed to get sck-gpiod: err=%ld\n",
PTR_ERR(hx711_data->gpiod_pd_sck));
return PTR_ERR(hx711_data->gpiod_pd_sck);
}
/*
* DOUT stands for serial data output of HX711
* for the driver it is an input
*/
hx711_data->gpiod_dout = devm_gpiod_get(dev, "dout", GPIOD_IN);
if (IS_ERR(hx711_data->gpiod_dout)) {
dev_err(dev, "failed to get dout-gpiod: err=%ld\n",
PTR_ERR(hx711_data->gpiod_dout));
return PTR_ERR(hx711_data->gpiod_dout);
}
hx711_data->reg_avdd = devm_regulator_get(dev, "avdd");
if (IS_ERR(hx711_data->reg_avdd))
return PTR_ERR(hx711_data->reg_avdd);
}
static struct platform_driver hx711_driver = {
.probe = hx711_probe,
.remove = hx711_remove,
.driver = {
.name = "hx711-gpio",
.of_match_table = of_hx711_match,
},
};
四、makefile——添加驱动
# luckfox-pico-main\sysdrv\source\kernel\drivers\Makefile
obj-$(CONFIG_IIO) += iio/
# luckfox-pico-main\sysdrv\source\kernel\drivers\iio\Makefile
obj-y += adc/
# luckfox-pico-main\sysdrv\source\kernel\drivers\iio\adc\Makefile
obj-$(CONFIG_HX711) += hx711.o
配置
luckfox-pico\sysdrv\source\kernel\arch\arm\configs\luckfox_rv1106_linux_defconfig
# sensor -- hx711
CONFIG_HX711=y
CONFIG_IIO=y
五、dts——使能gpio
5.1 参考
luckfox-pico\sysdrv\source\kernel\Documentation\devicetree\bindings\iio\adc\avia-hx711.yaml
examples:
- |
#include 注意,这里要改动下,需要匹配驱动中的of获取,移除gpios和supply。
//luckfox-pico-main\sysdrv\source\kernel\drivers\iio\adc\hx711.c
static const struct of_device_id of_hx711_match[] = {
{ .compatible = "avia,hx711", },
{},
};
5.2 改动1—— hx117节点
rv1103-luckfox-pico-ipc.dtsi
rv1103g-luckfox-pico.dts
rv1106-evb.dtsi
rv1106.dtsi
rv1103.dtsi
luckfox-pico-main\sysdrv\source\kernel\arch\arm\boot\dts\rv1103g-luckfox-pico.dts
hx711:hx711 {
status = "okay";
compatible = "avia,hx711";
sck-gpios = <&gpio1 RK_PA2 GPIO_ACTIVE_HIGH>;
dout-gpios = <&gpio1 RK_PA4 GPIO_ACTIVE_HIGH>;
avdd-supply = <&vcc_3v3>;//vcc3v3_sys
clock-frequency = <400000>;
};
dtsi中sck-gpios是全的,但是在代码中只有sck,这个是在代码中省去了,注意区分。
这里只是给hx117增加了设备节点,但是rv1103和其他平台不太一样,还需要自己在dts中定义pin的节点
5.3 改动2——引脚节点
这点真就没注意到,导致我纠结了好久,还是没有获取到hx117的数据。
参考:https://wiki.luckfox.com/zh/Luckfox-Pico/Luckfox-Pico-GPIO/
gpio1pa2:gpio1pa2 {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = <&gpio1_pa2>;
regulator-name = "gpio1_pa2";
regulator-always-on;
};
gpio0pa4:gpio0pa4 {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = <&gpio0_pa4>;
regulator-name = "gpio0_pa4";
regulator-always-on;
};
&pinctrl {
gpio1-pa2 {
gpio1_pa2:gpio1-pa2 {
rockchip,pins = <1 RK_PA2 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
gpio0-pa4 {
gpio0_pa4:gpio0-pa4 {
rockchip,pins = <0 RK_PA4 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};
5.4 已经被定义的引脚
板子的21-27都被定义了,这是用于fspi
i2c3和spi0被enable了,需要disable后测试hx117
其中spi的cs选的是c0(28+0=16),不是d2(38+2=26),所以只需要关掉i2s3即可。
或者改用gpio1_A2和gpio_A4,这样不会有引脚复用,可以同时支持i2c、spi、adc。
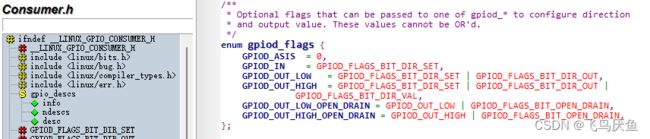
5.5 gpio源码
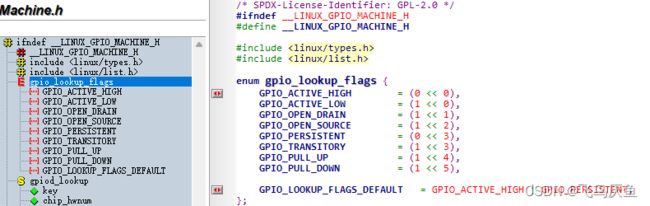
都设为高电平有效GPIO_ACTIVE_HIGH
引脚作为输入还是输出由驱动中devm_gpiod_get定义
/sys/bus/iio/devices/iio:device0/
六、改动总结——使能hx711
diff --git a/sysdrv/source/kernel/arch/arm/boot/dts/rv1103g-luckfox-pico.dts b/sysdrv/source/kernel/arch/arm/boot/dts/rv1103g-luckfox-pico.dts
index 0f1a686fc..b08b1797d 100644
--- a/sysdrv/source/kernel/arch/arm/boot/dts/rv1103g-luckfox-pico.dts
+++ b/sysdrv/source/kernel/arch/arm/boot/dts/rv1103g-luckfox-pico.dts
@@ -63,6 +63,23 @@ gpio4pb1:gpio4pb1 {
regulator-name = "gpio4_pb1";
regulator-always-on;
};
+
+ /* add hx711 */
+ gpio1pa2:gpio1pa2 {
+ compatible = "regulator-fixed";
+ pinctrl-names = "default";
+ pinctrl-0 = <&gpio1_pa2>;
+ regulator-name = "gpio1_pa2";
+ regulator-always-on;
+ };
+
+ gpio0pa4:gpio0pa4 {
+ compatible = "regulator-fixed";
+ pinctrl-names = "default";
+ pinctrl-0 = <&gpio0_pa4>;
+ regulator-name = "gpio0_pa4";
+ regulator-always-on;
+ };
};
/**********GPIO**********/
&pinctrl {
@@ -102,6 +119,19 @@ gpio4_pb1:gpio4-pb1 {
};
};
+ /* add hx711*/
+ gpio1-pa2 {
+ gpio1_pa2:gpio1-pa2 {
+ rockchip,pins = <1 RK_PA2 RK_FUNC_GPIO &pcfg_pull_none>;
+ };
+ };
+
+ gpio0-pa4 {
+ gpio0_pa4:gpio0-pa4 {
+ rockchip,pins = <0 RK_PA4 RK_FUNC_GPIO &pcfg_pull_none>;
+ };
+ };
+
};
@@ -178,19 +208,21 @@ &uart4 {
/**********PWM**********/
+
&pwm0 {
- status = "okay";
+ status = "disabled";
pinctrl-names = "active";
pinctrl-0 = <&pwm0m0_pins>;
// pinctrl-0 = <&pwm0m1_pins>;
};
&pwm1 {
- status = "okay";
+ status = "disabled";
pinctrl-names = "active";
pinctrl-0 = <&pwm1m0_pins>;
// pinctrl-0 = <&pwm1m1_pins>;
};
// &pwm2 {
// status = "okay";
// pinctrl-names = "active";
@@ -251,4 +283,15 @@ &pwm11 {
+/**********iio**********/
+/ {
+ hx711:hx711 {
+ status = "okay";
+ compatible = "avia,hx711";
+ sck-gpios = <&gpio1 RK_PA2 GPIO_ACTIVE_HIGH>;
+ dout-gpios = <&gpio0 RK_PA4 GPIO_ACTIVE_HIGH>;
+ avdd-supply = <&vcc_3v3>;//vcc3v3_sys
+ clock-frequency = <400000>;
+ };
+};
diff --git a/sysdrv/source/kernel/arch/arm/configs/luckfox_rv1106_linux_defconfig b/sysdrv/source/kernel/arch/arm/configs/luckfox_rv1106_linux_defconfig
index 4c54b6965..28a2caf94 100755
--- a/sysdrv/source/kernel/arch/arm/configs/luckfox_rv1106_linux_defconfig
+++ b/sysdrv/source/kernel/arch/arm/configs/luckfox_rv1106_linux_defconfig
@@ -320,3 +320,7 @@ CONFIG_DEBUG_FS=y
# CONFIG_SCHED_DEBUG is not set
# CONFIG_FTRACE is not set
# CONFIG_RUNTIME_TESTING_MENU is not set
+
+# sensor -- hx711
+CONFIG_HX711=y
+CONFIG_IIO=y
七、验证驱动添加
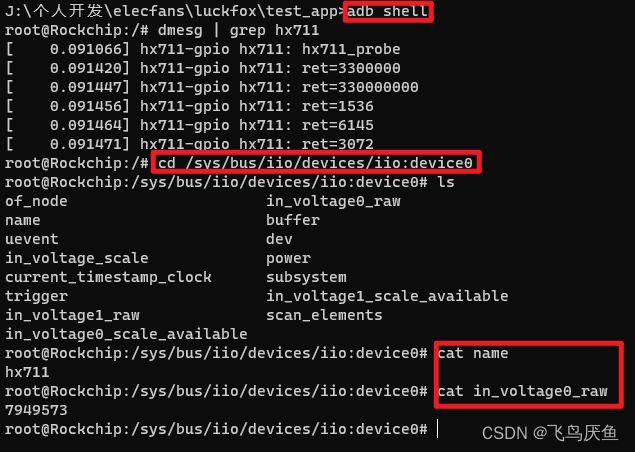
可以看到驱动正常加载了,注意dmesg中的hx711相关log是我自己在驱动中添加的,默认是没有的,可以直接获取iio属性判断驱动有没有添加成功。
root@Rockchip:/# dmesg | grep hx711
[ 0.091066] hx711-gpio hx711: hx711_probe
[ 0.091420] hx711-gpio hx711: ret=3300000
[ 0.091447] hx711-gpio hx711: ret=330000000
[ 0.091456] hx711-gpio hx711: ret=1536
[ 0.091464] hx711-gpio hx711: ret=6145
[ 0.091471] hx711-gpio hx711: ret=3072
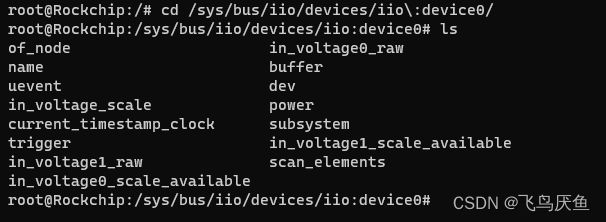
root@Rockchip:/# cd /sys/bus/iio/devices/iio:device0
root@Rockchip:/sys/bus/iio/devices/iio:device0# ls
of_node in_voltage0_raw
name buffer
uevent dev
in_voltage_scale power
current_timestamp_clock subsystem
trigger in_voltage1_scale_available
in_voltage1_raw scan_elements
in_voltage0_scale_available
root@Rockchip:/sys/bus/iio/devices/iio:device0# cat name
hx711
root@Rockchip:/sys/bus/iio/devices/iio:device0# cat in_voltage0_raw
7949573
root@Rockchip:/sys/bus/iio/devices/iio:device0#
八、编写测试文件
应用实例ko
https://wiki.luckfox.com/zh/Luckfox-Pico/Core3566-SDK
执行文件bin
https://wiki.luckfox.com/zh/Luckfox-Pico/Luckfox-Pico-GPIO
8.1 测试代码
hx711_app.c
#include 8.2 配置编译环境变量
需要在ubuntu环境下运行。
export PATH=/home/luckfox/Luckfox-Pico/luckfox-pico/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/bin:$PATH
source ~/.bashrc
cd ~/luckfox/luckfox-pico/project/app/test_app/hx711
arm-rockchip830-linux-uclibcgnueabihf-gcc hx711_app.c -o hx711_app

九、验证
由于将虚拟机中生成的可执行文件复制到windows本地,再通过adb传入设备中,这部分流程比较重复,所以编写了一个简单的bat脚本进行刷入,需要输入虚拟机的登录密钥就可以执行了。
scp [email protected]:/home/youkai/luckfox/luckfox-pico/project/app/test_app/hx711/hx711_app .
adb push hx711_app /root/
adb shell "chmod 777 /root/hx711_app"
adb shell "./root/hx711_app -c 187"
直接运行这个bat脚本,然后输入密码就可以实现自动刷执行文件并校准。
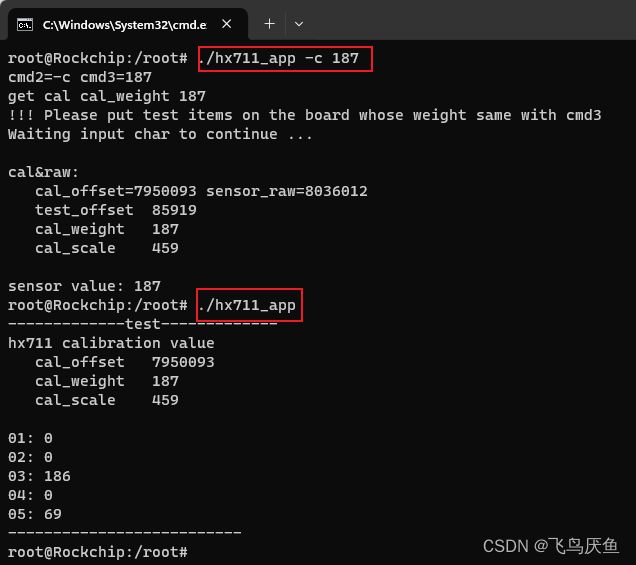
刷完执行文件后也可以手动下命令进行测试。
root@Rockchip:/root# ./hx711_app -c 187
root@Rockchip:/root# ./hx711_app
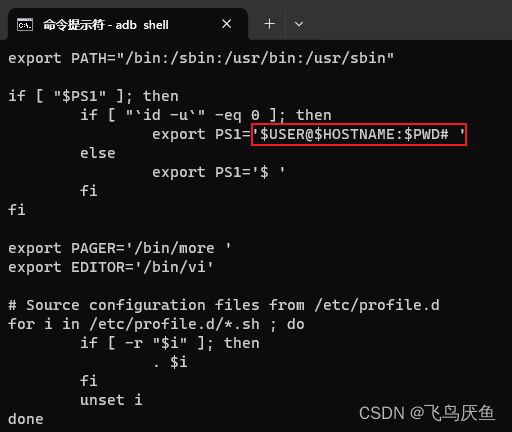
十、其他——添加文件路径
busybox vi /etc/profile
'# ' --> '$USER@$HOSTNAME:$PWD# '
source /etc/profile

小结
本章实现了hx711的数据读取,以及计算出称量物品的重量,后续可以结合算法实现相关功能。