ros中实现全局/局部避障算法的添加与rviz中规划路径的显示(上)
目录
前言
一、命令行
二、所用到的launch文件、yaml文件等
1.map1_mrobot_laser_nav_gazebo.launch
2.gmapping_demo.launch
3.gmapping.launch
4.move_base.launch
6.mrobot_teleop.launch
三、rviz中添加path插件
总结
前言
最近在做ros相关的作业,故写下本文留做参考以便日后再次使用或理解,如有错漏之处敬请指出!
所用的全局避障(路径规划)算法为A*,局部避障(路径规划)算法为DWA。
本文主要介绍DWA算法的添加和应用(因为A*还没做…)
一、命令行
#先在gazebo中建立并保存地图,file-save world as 保存world文件
roslaunch mrobot_gazebo map1_mrobot_laser_nav_gazebo.launch #启动gazebo,加载已建立的地图
roslaunch mrobot_navigation gmapping_demo.launch #启动move_base、rviz,此处的launch文件中不要添加最后的<加载地图文件>代码
roslaunch mrobot_teleop mrobot_teleop.launch #可以使用键盘的【uiojklm,.】九个键进行对小机器人的控制,使小车雷达扫描完整个地图
rosrun map_server map_saver -f ~/ws/src/robot_mrobot/mrobot_navigation/maps/图片名称 #保存地图yaml、pgm文件,路径根据情况进行更改即可
#更改好launch、yaml文件后
roslaunch mrobot_gazebo map1_mrobot_laser_nav_gazebo.launch #启动gazebo,加载已建立的地图
roslaunch mrobot_navigation gmapping_demo.launch #启动move_base、rviz
#在rviz中设置目标点,添加path插件选择topic来显示已规划出的全局/局部路径
二、所用到的launch文件、yaml文件等
1.map1_mrobot_laser_nav_gazebo.launch
2.gmapping_demo.launch
3.gmapping.launch
4.move_base.launch
- costmap_common_params.yaml 、local_costmap_params.yaml 、global_costmap_params.yaml 、base_local_planner_params.yaml 等文件可参考
【ROS】—— 机器人导航(仿真)—导航实现(十八)[重要][重要][重要]
或直接下载turtlebot3的配置文件,github链接: turtlebot3/turtlebot3_navigation/param at master · ROBOTIS-GIT/turtlebot3 · GitHub
- global_planner_params.yaml 文件我参考了move base参数及global planner,local planner设置
同时也是官方的解释global_planner - ROS Wiki ,代码如下:
GlobalPlanner:
allow_unknown: false #默认true,是否允许路径穿过未知区域
default_tolerance: 0.2 #默认0.0,目标容差
visualize_potential: false #默认false,是否显示从PointCloud2计算得到的势区域
use_dijkstra: true #默认true,true表示使用dijkstra's否则使用A*
use_quadratic: true #默认true,true表示使用二次函数近似函数
use_grid_path: false #默认false,true表示使路径沿栅格边界生成,否则使用梯度下降算法
old_navfn_behavior: false #默认false,是否复制navfn规划器的结果
lethal_cost: 253 #默认253,致命代价值
neutral_cost: 50 #默认50,中等代价值
cost_factor: 3.0 #默认3.0,代价因子
publish_potential: true #默认true,是否发布costmap的势函数
orientation_mode: 0 #默认0,设置点的方向
orientation_window_size: 1 #默认1,根据orientation_mode指定的位置积分确定窗口方向- move_base_params.yaml 、dwa_local_planner_params.yaml 文件也是参考【ROS-Navigation】—— DWA路径规划算法解析
5.nav03_map_server.launch
参考:ROS仿真机器人(安装、配置、测试、建图、定位、路径规划)(下)
6.mrobot_teleop.launch
三、rviz中添加path插件
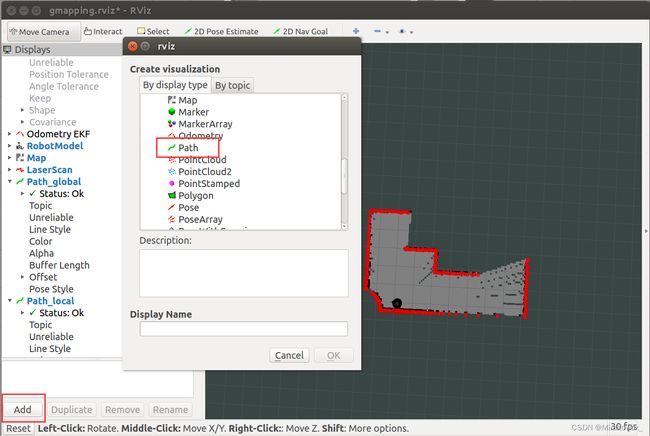
点击Add,往下滑动找到Path,若想显示全局和局部路径则添加两个,并选择对应的Topic,可以分别命名为Path_global和Path_local,并将线赋予不同颜色。
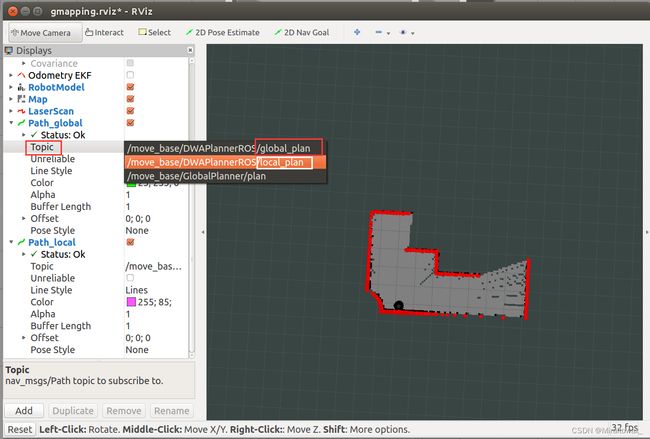
然后就可以实现在机器人运动过程中观察到全局、局部路径啦。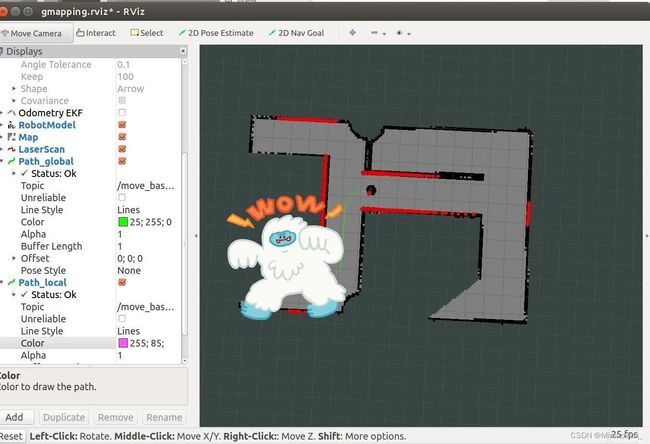
总结
- tips:1.launch文件中的 args=”$(find xxx) 我的理解来看xxx是所对应文件的上级或上上级文件夹的名字,使用代码时需注意将此处的名字改为自己launch/yaml文件夹对应路径名字。
2.在已开启的终端中加入新终端快捷键:Ctrl+Shift+T;开启新终端快捷键:Ctrl+Alt+T
- 现在没能解决的问题:
1.不知道如何在gazebo中显示小机器人蓝色的雷达线程(Belike:)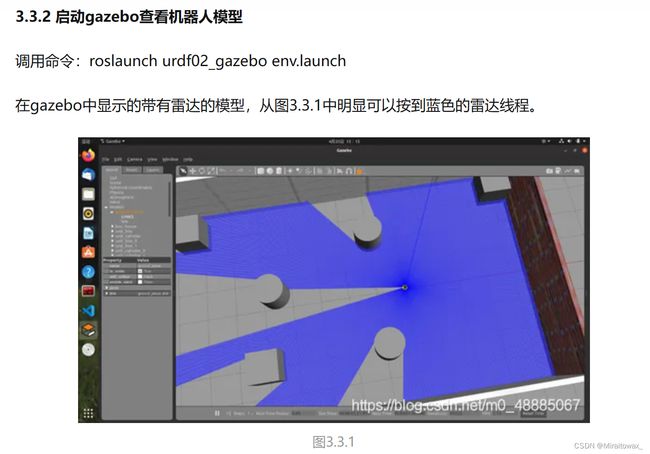
2.不知道如何将rviz中的地图显示为(Belike:)
希望有缘的大佬可以帮忙指导一下 (๑•̀ㅂ•́)و✧
主要参考:ROS仿真机器人(安装、配置、测试、建图、定位、路径规划)(上)
ROS仿真机器人(安装、配置、测试、建图、定位、路径规划)(下)
【ROS-Navigation】—— DWA路径规划算法解析
ROS系统SLAM基础学习:运行gazebo仿真建立保存地图