【无人机路径规划】基于A*算法求解无人机三维路径规划问题matlab源码
1 简介
SSA主要模拟了麻雀觅食的过程。麻雀觅食过程是发现者-跟随者模型的一种,同时还叠加了侦查预警机制。麻雀中容易找到食物的个体作为发现者,其他个体作为跟随者,同时种群中选取一定比例的个体进行侦查预警,如果发现危险则放弃食物,安全第一。由文献可知,SSA 是一种优于GWO、PSO、引力搜索算法(Gravity Search Algorithm,GSA)等算法的一种新的群智能优化算法。SSA算法中有发现者、追随者以及警戒者,分别按照各自规则进行位置更新,更新规则如下:

2 部分代码
function sdot = quadEOM_readonly(t, s, F, M, params) % QUADEOM_READONLY Solve quadrotor equation of motion % quadEOM_readonly calculate the derivative of the state vector % % INPUTS: % t - 1 x 1, time % s - 13 x 1, state vector = [x, y, z, xd, yd, zd, qw, qx, qy, qz, p, q, r] % F - 1 x 1, thrust output from controller (only used in simulation) % M - 3 x 1, moments output from controller (only used in simulation) % params - struct, output from nanoplus() and whatever parameters you want to pass in % % OUTPUTS: % sdot - 13 x 1, derivative of state vector s % % NOTE: You should not modify this function % See Also: quadEOM_readonly, nanoplus %************ EQUATIONS OF MOTION ************************ % Limit the force and moments due to actuator limits A = [0.25, 0, -0.5/params.arm_length; 0.25, 0.5/params.arm_length, 0; 0.25, 0, 0.5/params.arm_length; 0.25, -0.5/params.arm_length, 0]; prop_thrusts = A*[F;M(1:2)]; % Not using moment about Z-axis for limits prop_thrusts_clamped = max(min(prop_thrusts, params.maxF/4), params.minF/4); B = [ 1, 1, 1, 1; 0, params.arm_length, 0, -params.arm_length; -params.arm_length, 0, params.arm_length, 0]; F = B(1,:)*prop_thrusts_clamped; M = [B(2:3,:)*prop_thrusts_clamped; M(3)]; % Assign states x = s(1); y = s(2); z = s(3); xdot = s(4); ydot = s(5); zdot = s(6); qW = s(7); qX = s(8); qY = s(9); qZ = s(10); p = s(11); q = s(12); r = s(13); quat = [qW; qX; qY; qZ]; bRw = QuatToRot(quat); wRb = bRw'; % Acceleration accel = 1 / params.mass * (wRb * [0; 0; F] - [0; 0; params.mass * params.grav]); % Angular velocity K_quat = 2; %this enforces the magnitude 1 constraint for the quaternion quaterror = 1 - (qW^2 + qX^2 + qY^2 + qZ^2); qdot = -1/2*[0, -p, -q, -r;... p, 0, -r, q;... q, r, 0, -p;... r, -q, p, 0] * quat + K_quat*quaterror * quat; % Angular acceleration omega = [p;q;r]; pqrdot = params.invI * (M - cross(omega, params.I*omega)); % Assemble sdot sdot = zeros(13,1); sdot(1) = xdot; sdot(2) = ydot; sdot(3) = zdot; sdot(4) = accel(1); sdot(5) = accel(2); sdot(6) = accel(3); sdot(7) = qdot(1); sdot(8) = qdot(2); sdot(9) = qdot(3); sdot(10) = qdot(4); sdot(11) = pqrdot(1); sdot(12) = pqrdot(2); sdot(13) = pqrdot(3); end
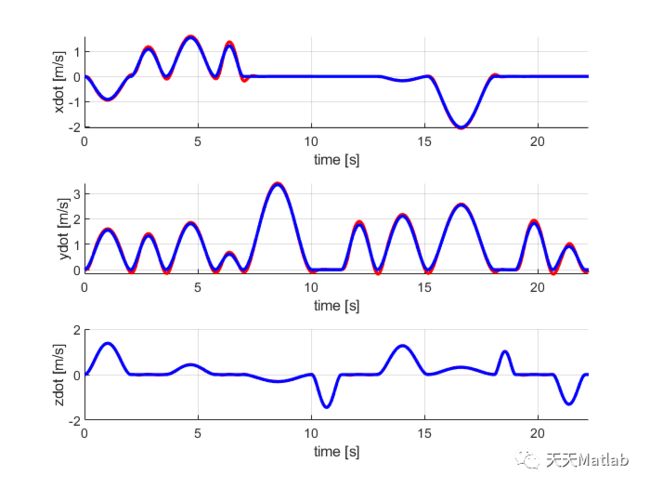
3 仿真结果


4 参考文献
[1]刘贵云等. "基于混沌自适应麻雀搜索算法的无人机三维航迹规划方法.".
