redis原理 主从同步和哨兵集群
主从库如何实现数据一致
我们总说的 Redis 具有高可靠性,又是什么意思呢?其实,这里有两层含义:一是数据尽量少丢失,二是服务尽量少中断。AOF 和 RDB 保证了前者,而对于后者,Redis 的做法就是增加副本冗余量,将一份数据同时保存在多个实例上
实际上,Redis 提供了主从库模式,以保证数据副本的一致,主从库之间采用的是读写分离的方式。
读操作:主库、从库都可以接收;
写操作:首先到主库执行,然后,主库将写操作同步给从库。
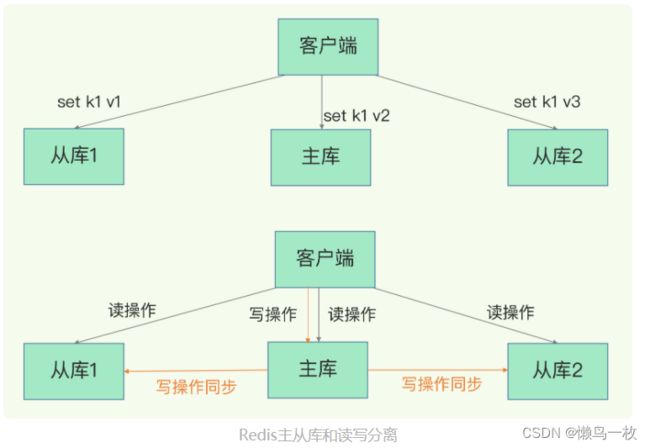
而主从库模式一旦采用了读写分离,所有数据的修改只会在主库上进行,不用协调三个实例。主库有了最新的数据后,会同步给从库,这样,主从库的数据就是一致的。
主从库间如何进行第一次同步
当我们启动多个 Redis 实例的时候,它们相互之间就可以通过 replicaof(Redis 5.0 之前使用 slaveof)命令形成主库和从库的关系,之后会按照三个阶段完成数据的第一次同步
第一次同步的三个阶段

-
第一阶段是主从库间建立连接、协商同步的过程,主要是为全量复制做准备。在这一步,从库和主库建立起连接,并告诉主库即将进行同步,主库确认回复后,主从库间就可以开始同步了。
这里有个地方需要注意,FULLRESYNC 响应表示第一次复制采用的全量复制,也就是说,主库会把当前所有的数据都复制给从库。 -
在第二阶段,主库将所有数据同步给从库。从库收到数据后,在本地完成数据加载。这个过程依赖于内存快照生成的 RDB 文件。 在主库将数据同步给从库的过程中,主库不会被阻塞,仍然可以正常接收请求。否则,Redis 的服务就被中断了。但是,这些请求中的写操作并没有记录到刚刚生成的 RDB 文件中。为了保证主从库的数据一致性,主库会在内存中用专门的 replication buffer,记录 RDB 文件生成后收到的所有写操作。
-
也就是第三个阶段,主库会把第二阶段执行过程中新收到的写命令,再发送给从库。具体的操作是,当主库完成 RDB 文件发送后,就会把此时 replication buffer 中的修改操作发给从库,从库再重新执行这些操作。这样一来,主从库就实现同步了。
主从级联模式分担全量复制时的主库压力
对于主库来说,需要完成两个耗时的操作:生成 RDB 文件和传输 RDB 文件。如果从库数量很多,而且都要和主库进行全量复制的话,就会导致主库忙于 fork 子进程生成 RDB 文件,进行数据全量同步。fork 这个操作会阻塞主线程处理正常请求,从而导致主库响应应用程序的请求速度变慢。此外,传输 RDB 文件也会占用主库的网络带宽,同样会给主库的资源使用带来压力。那么,有没有好的解决方法可以分担主库压力呢?
我们可以通过“主 - 从 - 从”模式将主库生成 RDB 和传输 RDB 的压力,以级联的方式分散到从库上。
这些从库就会知道,在进行同步时,不用再和主库进行交互了,只要和级联的从库进行写操作同步就行了,这就可以减轻主库上的压力
主从库间网络断了怎么办
从 Redis 2.8 开始,网络断了之后,主从库会采用增量复制的方式继续同步;
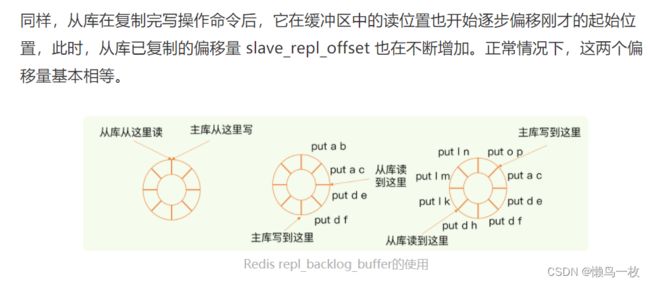
当主从库断连后,主库会把断连期间收到的写操作命令,写入 replication buffer,同时也会把这些操作命令也写入 repl_backlog_buffer 这个缓冲区。repl_backlog_buffer 是一个环形缓冲区,主库会记录自己写到的位置,从库则会记录自己已经读到的位置。
此时,主库只用把 master_repl_offset 和 slave_repl_offset 之间的命令操作同步给从库就行。就像刚刚示意图的中间部分,主库和从库之间相差了 put d e 和 put d f 两个操作,在增量复制时,主库只需要把它们同步给从库,就行了;
因为 repl_backlog_buffer 是一个环形缓冲区,所以在缓冲区写满后,主库会继续写入,此时,就会覆盖掉之前写入的操作。如果从库的读取速度比较慢,就有可能导致从库还未读取的操作被主库新写的操作覆盖了,这会导致主从库间的数据不一致。
因此,我们要想办法避免这一情况,一般而言,我们可以调整 repl_backlog_size 这个参数。这个参数和所需的缓冲空间大小有关。缓冲空间的计算公式是:缓冲空间大小 = 主库写入命令速度 * 操作大小 - 主从库间网络传输命令速度 * 操作大小。在实际应用中,考虑到可能存在一些突发的请求压力,我们通常需要把这个缓冲空间扩大一倍,即 repl_backlog_size = 缓冲空间大小 * 2,这也就是 repl_backlog_size 的最终值。
举个例子,如果主库每秒写入 2000 个操作,每个操作的大小为 2KB,网络每秒能传输 1000 个操作,那么,有 1000 个操作需要缓冲起来,这就至少需要 2MB 的缓冲空间。否则,新写的命令就会覆盖掉旧操作了。为了应对可能的突发压力,我们最终把 repl_backlog_size 设为 4MB。
Redis 的主从库同步的基本原理总结
有三种模式:全量复制、基于长连接的命令传播,以及增量复制。全量复制虽然耗时,但是对于从库来说,如果是第一次同步,全量复制是无法避免的,所以,我给你一个小建议:一个 Redis 实例的数据库不要太大,一个实例大小在几 GB 级别比较合适,这样可以减少 RDB 文件生成、传输和重新加载的开销。另外,为了避免多个从库同时和主库进行全量复制,给主库过大的同步压力,我们也可以采用“主 - 从 - 从”这一级联模式,来缓解主库的压力。
哨兵集群
基于 pub/sub 机制的哨兵集群组成
哨兵实例之间可以相互发现,要归功于 Redis 提供的 pub/sub 机制,也就是发布 / 订阅机制。
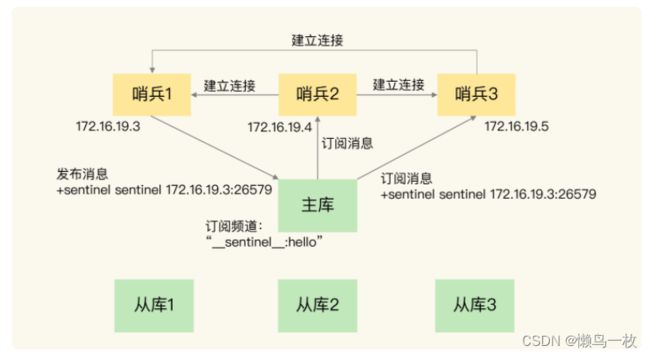
哨兵只要和主库建立起了连接,就可以在主库上发布消息了,比如说发布它自己的连接信息(IP 和端口)。同时,它也可以从主库上订阅消息,获得其他哨兵发布的连接信息。当多个哨兵实例都在主库上做了发布和订阅操作后,它们之间就能知道彼此的 IP 地址和端口;
当消息类别相同时,它们就属于同一个频道。反之,就属于不同的频道。只有订阅了同一个频道的应用,才能通过发布的消息进行信息交换;
当消息类别相同时,它们就属于同一个频道。反之,就属于不同的频道。只有订阅了同一个频道的应用,才能通过发布的消息进行信息交换。
在主从集群中,主库上有一个名为“sentinel:hello”的频道,不同哨兵就是通过它来相互发现,实现互相通信的。我来举个例子,具体说明一下。在下图中,哨兵 1 把自己的 IP(172.16.19.3)和端口(26579)发布到“sentinel:hello”频道上,哨兵 2 和 3 订阅了该频道。那么此时,哨兵 2 和 3 就可以从这个频道直接获取哨兵 1 的 IP 地址和端口号。然后,哨兵 2、3 可以和哨兵 1 建立网络连接。通过这个方式,哨兵 2 和 3 也可以建立网络连接,这样一来,哨兵集群就形成了。它们相互间可以通过网络连接进行通信,比如说对主库有没有下线这件事儿进行判断和协商。
哨兵除了彼此之间建立起连接形成集群外,还需要和从库建立连接。这是因为,在哨兵的监控任务中,它需要对主从库都进行心跳判断,而且在主从库切换完成后,它还需要通知从库,让它们和新主库进行同步。
哨兵是如何知道从库的 IP 地址和端口
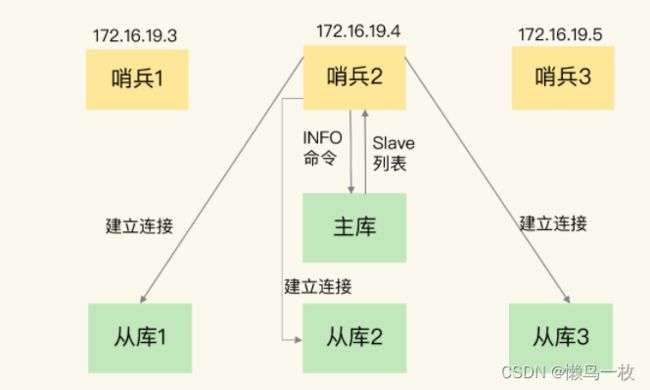
这是由哨兵向主库发送 INFO 命令来完成的。就像下图所示,哨兵 2 给主库发送 INFO 命令,主库接受到这个命令后,就会把从库列表返回给哨兵;
你看,通过 pub/sub 机制,哨兵之间可以组成集群,同时,哨兵又通过 INFO 命令,获得了从库连接信息,也能和从库建立连接,并进行监控了;
主从切换
如何在客户端通过监控了解哨兵进行主从切换的过程呢?比如说,主从切换进行到哪一步了?这其实就是要求,客户端能够获取到哨兵集群在监控、选主、切换这个过程中发生的各种事件
基于 pub/sub 机制的客户端事件通知
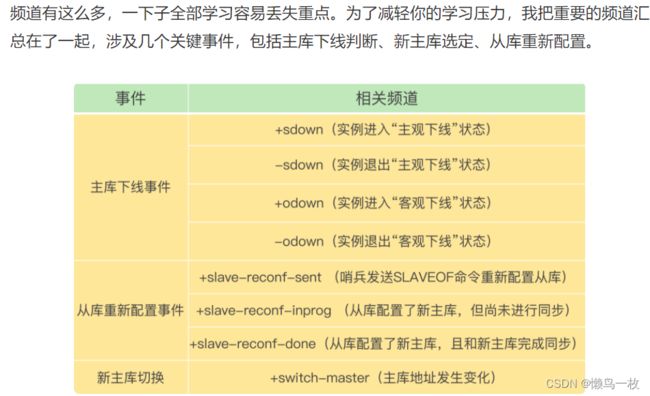
哨兵就是一个运行在特定模式下的 Redis 实例,只不过它并不服务请求操作,只是完成监控、选主和通知的任务。所以,每个哨兵实例也提供 pub/sub 机制,客户端可以从哨兵订阅消息。哨兵提供的消息订阅频道有很多,不同频道包含了主从库切换过程中的不同关键事件。
知道了这些频道之后,你就可以让客户端从哨兵这里订阅消息了具体的操作步骤是,客户端读取哨兵的配置文件后,可以获得哨兵的地址和端口,和哨兵建立网络连接。然后,我们可以在客户端执行订阅命令,来获取不同的事件消息。举个例子,你可以执行如下命令,来订阅“所有实例进入客观下线状态的事件”:
举个例子,你可以执行如下命令,来订阅“所有实例进入客观下线状态的事件”:
SUBSCRIBE +odown
当然,你也可以执行如下命令,订阅所有的事件:
PSUBSCRIBE
由哪个哨兵执行主从切换
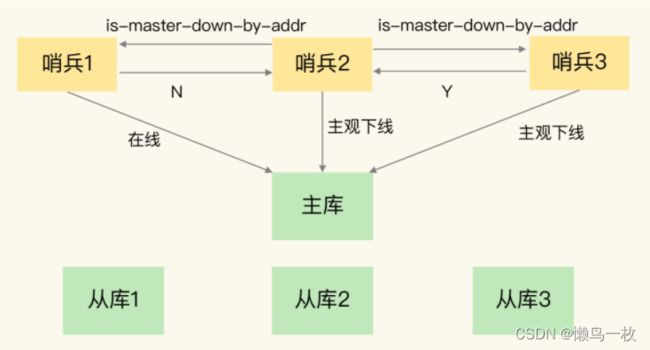
确定由哪个哨兵执行主从切换的过程,和主库“客观下线”的判断过程类似,也是一个“投票仲裁”的过程。
一个哨兵获得了仲裁所需的赞成票数后,就可以标记主库为“客观下线”。这个所需的赞成票数是通过哨兵配置文件中的 quorum 配置项设定的。例如,现在有 5 个哨兵,quorum 配置的是 3,那么,一个哨兵需要 3 张赞成票,就可以标记主库为“客观下线”了。这 3 张赞成票包括哨兵自己的一张赞成票和另外两个哨兵的赞成票;(客观下线投票)
哨兵“Leader 选举”
此时,这个哨兵就可以再给其他哨兵发送命令,表明希望由自己来执行主从切换,并让所有其他哨兵进行投票。这个投票过程称为“Leader 选举”。因为最终执行主从切换的哨兵称为 Leader,投票过程就是确定 Leader。
任何一个想成为 Leader 的哨兵,要满足两个条件:第一,拿到半数以上的赞成票;第二,拿到的票数同时还需要大于等于哨兵配置文件中的 quorum 值。以 3 个哨兵为例,假设此时的 quorum 设置为 2,那么,任何一个想成为 Leader 的哨兵只要拿到 2 张赞成票,就可以了。
需要注意的是,如果哨兵集群只有 2 个实例,此时,一个哨兵要想成为 Leader,必须获得 2 票,而不是 1 票。所以,如果有个哨兵挂掉了,那么,此时的集群是无法进行主从库切换的。因此,通常我们至少会配置 3 个哨兵实例。这一点很重要,你在实际应用时可不能忽略了。
部署经验
一个经验:要保证所有哨兵实例的配置是一致的,尤其是主观下线的判断值 down-after-milliseconds。我们曾经就踩过一个“坑”。当时,在我们的项目中,因为这个值在不同的哨兵实例上配置不一致,导致哨兵集群一直没有对有故障的主库形成共识,也就没有及时切换主库,最终的结果就是集群服务不稳定。所以,你一定不要忽略这条看似简单的经验。