嵌入式Linux设备驱动程序开发指南12(处理设备驱动中使用的中断)——读书笔记
处理设备驱动中使用的中断
- 十二、处理设备驱动中使用的中断
-
- 12.1 Linux内核的中断域
- 12.2 设备树中断处理
- 12.3 按钮中断设备
-
- 12.3.1 设备树
- 12.3.2 int_sam_key.c代码
- 12.3.3 测试调试
- 12.4 延迟工作
-
- 12.4.1 软中断
- 12.4.2 tasklet
- 12.4.3 定时器
- 12.4.4 线程化的中断
- 12.4.5 工作队列
- 12.8 内核中的锁
-
- 12.8.1 简介
- 12.8.2 锁的使用场景
- 12.8.3 keyled_sam_class.c代码(keyled完整代码)
- 12.8.4 测试调试
- 12.9 内核中的睡眠
-
- 12.9.1 简介
- 12.9.2 案例
- 12.9.2.1 at91-sama5d2_xplained_common.dtsi设备树
- 12.9.2.2 int_sam_key_wait.c睡眠设备代码
- 12.9.2.3 测试调试
- 12.10 内核线程
十二、处理设备驱动中使用的中断
12.1 Linux内核的中断域
IRQ是来自设备的中断请求,不同设备可以共享中断线,从而可以共享IRQ。中断控制器驱动将irq_chip数据结构注册到内核中,
GPIO中断芯片分类:
1、级联GPIO中断芯片
generic_handle_irq() //运行每个特定GPIO设备驱动处理程序
request_irq() //请求此特定的GPIO控制器中断引脚
platform_get_resource() //从设备树中提取与源于父级中断控制器的中断引脚对应每个中断号
2、嵌套线程化GPIO中断芯片
片外GPIO扩展器以及位于睡眠总线另一侧的任何其他GPIO中断芯片。
gpiochip_irqchip_add()
irq_create_mapping()
12.2 设备树中断处理
中断信号可以来自机器中的任何设备,也可以在机器设备的任何设备上终止,设备寻址表现为树形结构,中断信号表现为独立于树的节点之间的连接。
中断连接的4个属性:
1、interrupt_controller属性,将节点表明为接受中断连接;
2、interrupt_cell是中断控制节点的属性,表明设备中断属性中的单元数;
3、interrupt_parent包含与其相连的中断控制器的phandle;
4、interrupt包含一系列中断说明符
举例:
flx4: flexcom@fc018000 {
atmel,flexcom-mode = <ATMEL_FLEXCOM_MODE_TWI>;
status = "okay";
i2c2: i2c@600 {
compatible = "atmel,sama5d2-i2c";
reg = <0x600 0x200>;
interrupts = <23 IRQ_TYPE_LEVEL_HIGH 7>;
dmas = <0>, <0>;
dma-names = "tx", "rx";
#address-cells = <1>;
#size-cells = <0>;
clocks = <&flx4_clk>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_flx4_default>;
atmel,fifo-size = <16>;
status = "okay";
};
};
12.3 按钮中断设备
中断由CPU调度,异步运行。在Linux中,使用以下函数来获取和释放中断的:
request_irq()
free_irq()
分配中断资源、并启用中断线和IRQ处理函数是用的函数:
devm_request_irq()
中断处理函数的定义如下:
irqreturn_t (*handler)(int irq_no, void *dev_id); //中断处理函数接收Linux中断号(irq_no)
12.3.1 设备树
pinctrl@fc038000 {
/*
* There is no real pinmux for ADC, if the pin
* is not requested by another peripheral then
* the muxing is done when channel is enabled.
* Requesting pins for ADC is GPIO is
* encouraged to prevent conflicts and to
* disable bias in order to be in the same
* state when the pin is not muxed to the adc.
*/
pinctrl_adc_default: adc_default {
pinmux = <PIN_PD23__GPIO>;
bias-disable;
};
...
pinctrl_key_gpio_default: key_gpio_default {
pinmux = <PIN_PB9__GPIO>;
bias-pull-up;
};
/ {
model = "Atmel SAMA5D2 Xplained";
compatible = "atmel,sama5d2-xplained", "atmel,sama5d2", "atmel,sama5";
chosen {
stdout-path = "serial0:115200n8";
};
clocks {
slow_xtal {
clock-frequency = <32768>;
};
main_xtal {
clock-frequency = <12000000>;
};
};
int_key{
compatible = "arrow,intkey";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_key_gpio_default>;
gpios = <&pioA 41 GPIO_ACTIVE_LOW>;
interrupt-parent = <&pioA>;
interrupts = <41 IRQ_TYPE_EDGE_FALLING>;
};
12.3.2 int_sam_key.c代码
/* 头文件 */
#include 12.3.3 测试调试
insmod int_key_imx_key.ko
cat /proc/interrupts
rmmod int_key_imx_key.ko
12.4 延迟工作
延迟工作是一种内核机制,允许开发人员将代码安排在以后的时间执行。这些延迟后的所执行的代码可以使用工作队列或线程化中断的进程上下文运行,也可以在软中断、tasklet和定时器的中断上下文中运行。延迟工作具有补充中断处理的功能,因为中断是具有严格的要求和限制,如:中断处理程序的执行时间必须尽可能短,在中断上下文中,不能出现可能导致阻塞的调用。
1、进程上下文:在执行过程中允许被阻塞的被执行的系统调用,由于工作队列和中断调度的延迟工作也视为在进程上下文中执行。这些内核线程在内核态的上下文中执行,不代表任何用户进程。
2、中断上下文:响应硬件中断请求的异步执行,有被称为原子上下文。中断的产生是不可预期的,它们产生并执行中断的处理程序。软中断、tasklet和定时器都在中断上下文中运行,这意味着它们无法调用阻塞函数。
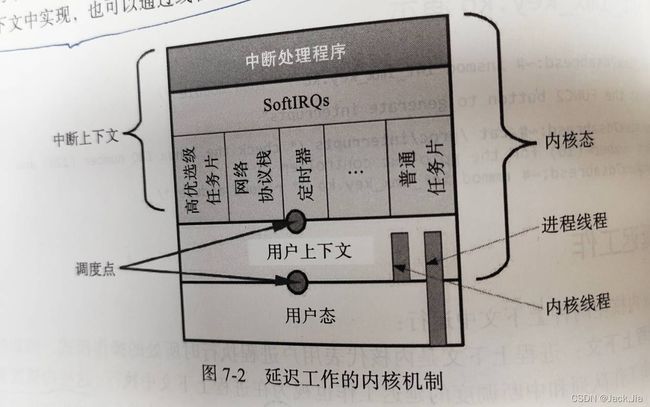
在中断延迟工作机制下,中断处理函数以最短的时间处理完之后,从中断处理程序安排一个异步操作,稍后延迟运行,完成剩下的操作,中断处理使用的这种延迟操作被称作是下半部。其目的是完成中断处理程序即上半部中剩余的动作。
下半部的中断处理在Linux中通过软中断、tasklet、线程化的中断在上下文中实现。
12.4.1 软中断
适用于运行时间长、非阻塞的处理程序。软中断会尽早执行,但任然可以被中断,一边任何中断处理程序即上半部抢占它。
设备驱动程序不能使用软中断,软中断是为内核子系统保留的,对于当前内核版本定义了一下类型:
enum
{
HI_SOFTIRQ=0, //最高优先级,不能调用阻塞函数,运行tasklet
TIMER_SOFTIRQ, //运行定时器
NET_TX_SOFTIRQ, //被网络子系统使用
NET_RX_SOFTIRQ, //被网络子系统使用
BLOCK_SOFTIRQ, //被IO子系统使用
BLOCK_IOPOLL_SOFTIRQ, //被IO子系统使用,使用iopoll处理程序时提高性能
TASKLET_SOFTIRQ, //运行tasklet
SCHED_SOFTIRQ, //用于调度子系统使用,实现负载均衡
HRTIMER_SOFTIRQ, //高精度定时器使用
RCU_SOFTIRQ, //Preferable RCU should always be the last softirq
NR_SOFTIRQS
};
12.4.2 tasklet
tasklet是延时工作的一种特殊形式,在中断上下文中运行,tasklet可以动态分配,因此可以运行在设备驱动程序。
tasklet_init() //tasklet初始化
tasklet_schedule() //tasklet调度
tasklet_hi_schedule() //只有HI_SOFTIRQ类型软中断被调度
12.4.3 定时器
定时器是一种经常被使用的延迟工作处理方式。他们在中断上下文运行,并在软中断之山实现。
struct timer_list *timer;
setup_timer() //初始化定时器
mod_timer() //调度定时器
del_timer()
del_timer_sync()
定时器一个常见错误是忘记关闭定时器,删除模块之前,必须停止定时器。如果在删除模块之前没有停止定时器,定时器到期,则无法将处理函数加载到内核中,并将产内核oops。
12.4.4 线程化的中断
处理中断的驱动程序无法保证所以场景都在非阻塞的模式下读取设备寄存器,如果是阻塞的,就可以使用内核提供了线程化的中断,使用函数如下:
request_threaded_irq() //完成中断上下文和进程上下文节点,运行的中断处理函数
devm_request_threaded_irq() //建议使用
12.4.5 工作队列
工作队列是延迟工作的另一种方式。工作的基本单位是work,并在工作队列中排队。工作队列将工作延迟到运行于进程上下文的内核线程中,并且可以睡眠。工作线程由工作线程池控制,工作线程池负责并发(同时运行的工作线程)级别管理和进程管理。
#include 12.8 内核中的锁
12.8.1 简介
解决并发问题访问临界区(竞争)的方案是,使用锁。锁确保只有一个实例可以随时进入临界区。
内核锁有两种形式:
1、自旋锁:include/asm/spinlock.h,
如果无法获得自旋锁,则将一直尝试自旋直到获得锁(禁止正在运行的内核中的抢占);
2、互斥锁:include/linux/mutex.h,
如果无法获得自旋锁,则任务将被自动挂起,并在互斥锁释放时被唤醒,意味着CPU在等待互斥锁的期间,可以执行其他操作。
12.8.2 锁的使用场景
1、锁和单处理器内核:连个配置CONFIG)sMP和CONFIG_PREEMPT编译开关,是自旋锁的开关,决定自旋锁是否禁止抢占;
2、在用户上下文中使用锁:使用简单的互斥锁实现只从用户上下文中访问的数据结构的保护,mutex_lock_interruptible()获取互斥锁,mutex_unlock()释放互斥锁。
3、在中断和进程上下文之间共享自旋锁:
spain_lock_irqsave()
spain_unlock_irqrestore()
12.8.3 keyled_sam_class.c代码(keyled完整代码)
使用共享自旋锁来保护中断和上下文,
//包含头文件
#include 12.8.4 测试调试
insmod keyled_imx_class.ko
ls /sys/class/keyled //查看keyled下的设备
echo on > /sys/class/keyled/blue/set_led //打开蓝色灯
echo off > /sys/class/keyled/blue/set_led //关闭蓝色灯
echo on > /sys/class/keyled/green/blink_on_led //打开蓝色灯闪烁
echo off > /sys/class/keyled/green/blink_off_led //关闭蓝色灯闪烁
echo 100 > /sys/class/keyled/red/set_period //改变闪烁周期
rmmod keyled_imx_class.ko
12.9 内核中的睡眠
12.9.1 简介
在Linux内核编程中,常常用到用户进程需要睡眠,并在某些特定工作完成时被唤醒。
当用户进程处于睡眠,将被标记处于特定状态,调度器将其从运行队列中删除。
在原子上下文运行中,不允许睡眠。
#include 12.9.2 案例
12.9.2.1 at91-sama5d2_xplained_common.dtsi设备树
/ {
model = "Atmel SAMA5D2 Xplained";
compatible = "atmel,sama5d2-xplained", "atmel,sama5d2", "atmel,sama5";
chosen {
stdout-path = "serial0:115200n8";
};
pinctrl@fc038000 {
pinctrl_key_gpio_default: key_gpio_default {
pinmux = <PIN_PB9__GPIO>;
bias-pull-up;
};
};
int_key{
compatible = "arrow,intkey";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_key_gpio_default>;
gpios = <&pioA 41 GPIO_ACTIVE_LOW>;
interrupt-parent = <&pioA>;
interrupts = <41 IRQ_TYPE_EDGE_FALLING>;
};
//本次使用睡眠设备
int_key_wait {
compatible = "arrow,intkeywait";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_key_gpio_default>;
gpios = <&pioA 41 GPIO_ACTIVE_LOW>;
interrupt-parent = <&pioA>;
interrupts = <41 IRQ_TYPE_EDGE_BOTH>;
};
12.9.2.2 int_sam_key_wait.c睡眠设备代码
//包含的头文件
#include 12.9.2.3 测试调试
insmod int_imx_key_wait.ko
cat /proc/interrupts
cat /dev/my_dev > states //sleep the process
cat states //查看按下按钮次数
rmmod int_imx_key_wait.ko
12.10 内核线程
内核线程的出现是处于在进程上下文中运行内核代码的需要。
本质上,内核线程是工作在内核模式运行并且没有用户地址空间和其他用户属性的线程。
#include 创建和运行内核线程:
#include 感谢阅读,祝君成功!
-by aiziyou