Linux 信号量实验-基于正点原子IMX6ULL开发板
1 信号量简介
大家如果有学习过 FreeRTOS 或者 UCOS 的话就应该对信号量很熟悉,因为信号量是同步的一种方式。Linux 内核也提供了信号量机制,信号量常常用于控制对共享资源的访问。举一个很常见的例子,某个停车场有 100 个停车位,这 100 个停车位大家都可以用,对于大家来说这100 个停车位就是共享资源。假设现在这个停车场正常运行,你要把车停到这个这个停车场肯定要先看一下现在停了多少车了?还有没有停车位?当前停车数量就是一个信号量,具体的停车数量就是这个信号量值,当这个值到 100 的时候说明停车场满了。停车场满的时你可以等一会看看有没有其他的车开出停车场,当有车开出停车场的时候停车数量就会减一,也就是说信号量减一,此时你就可以把车停进去了,你把车停进去以后停车数量就会加一,也就是信号量加一。这就是一个典型的使用信号量进行共享资源管理的案例,在这个案例中使用的就是计数型信号量。
相比于自旋锁,信号量可以使线程进入休眠状态,比如 A 与 B、C 合租了一套房子,这个房子只有一个厕所,一次只能一个人使用。某一天早上 A 去上厕所了,过了一会 B 也想用厕所,因为 A 在厕所里面,所以 B 只能等到 A 用来了才能进去。B 要么就一直在厕所门口等着,等 A 出来,这个时候就相当于自旋锁。B 也可以告诉 A,让 A 出来以后通知他一下,然后 B 继续回房间睡觉,这个时候相当于信号量。可以看出,使用信号量会提高处理器的使用效率,毕竟不用一直傻乎乎的在那里“自旋”等待。但是,信号量的开销要比自旋锁大,因为信号量使线程进入休眠状态以后会切换线程,切换线程就会有开销。总结一下信号量的特点:
①、因为信号量可以使等待资源线程进入休眠状态,因此适用于那些占用资源比较久的场合。
②、因此信号量不能用于中断中,因为信号量会引起休眠,中断不能休眠。
③、如果共享资源的持有时间比较短,那就不适合使用信号量了,因为频繁的休眠、切换线程引起的开销要远大于信号量带来的那点优势。
信号量有一个信号量值,相当于一个房子有 10 把钥匙,这 10 把钥匙就相当于信号量值为10。因此,可以通过信号量来控制访问共享资源的访问数量,如果要想进房间,那就要先获取一把钥匙,信号量值减 1,直到 10 把钥匙都被拿走,信号量值为 0,这个时候就不允许任何人进入房间了,因为没钥匙了。如果有人从房间出来,那他要归还他所持有的那把钥匙,信号量值加 1,此时有 1 把钥匙了,那么可以允许进去一个人。相当于通过信号量控制访问资源的线程数,在初始化的时候将信号量值设置的大于 1,那么这个信号量就是计数型信号量,计数型信号量不能用于互斥访问,因为它允许多个线程同时访问共享资源。如果要互斥的访问共享资源那么信号量的值就不能大于 1,此时的信号量就是一个二值信号量。
2 信号量 API 函数
Linux 内核使用 semaphore 结构体表示信号量,结构体内容如下所示:
struct semaphore {
raw_spinlock_t lock;
unsigned int count;
struct list_head wait_list;
};
要想使用信号量就得先定义,然后初始化信号量。有关信号量的 API 函数如下所示
DEFINE_SEAMPHORE(name) //定义一个信号量,并且设置信号量的值为 1。
void sema_init(struct semaphore *sem, int val) //初始化信号量 sem,设置信号量值为 val。
void down(struct semaphore *sem)//获取信号量,因为会导致休眠,因此不能在中断中使用。
int down_trylock(struct semaphore *sem)//尝试获取信号量,如果能获取到信号量就获取,并且返回 0。如果不能就返回非 0,并且不会进入休眠。
int down_interruptible(struct semaphore *sem)//获取信号量,和 down 类似,只是使用 down 进入休眠状态的线程不能被信号打断。而使用此函数进入休眠以后是可以被信号打断的。
void up(struct semaphore *sem) //释放信号量
信号量的使用如下所示:
struct semaphore sem; /* 定义信号量 */
sema_init(&sem, 1); /* 初始化信号量 */
down(&sem); /* 申请信号量 */
/* 临界区 */
up(&sem); /* 释放信号量 */
3 信号量实验
我们在驱动的 open 函数申请信号量,然后在release 函数中释放信号量。
3.1 实验程序编写
驱动文件semaphore.c
#include 第一步:在驱动入口函数中调用 sema_init 函数初始化信号量 sem 的值为 1,相当于 sem是个二值信号量。
第二步:在 open函数中申请信号量,可以使用 down 函数,也可以使用 down_interruptible函数。如果信号量值大于等于 1 就表示可用,那么应用程序就会开始使用 LED 灯。如果信号量值为 0 就表示应用程序不能使用 LED 灯,此时应用程序就会进入到休眠状态。等到信号量值大于 1 的时候应用程序就会唤醒,申请信号量,获取 LED 灯使用权。
第三步:在 release 函数中调用 up 函数释放信号量,这样其他因为没有得到信号量而进入休眠状态的应用程序就会唤醒,获取信号量。
当信号量 sem 为 1 的时候表示 LED 灯还没有被使用,如果应用程序 A 要使用LED 灯,先调用 open 函数打开/dev/gpioled,这个时候会获取信号量 sem,获取成功以后 sem 的值减 1 变为 0。如果此时应用程序 B 也要使用 LED 灯,调用 open 函数打开/dev/gpioled 就会因为信号量无效(值为 0)而进入休眠状态。当应用程序 A 运行完毕,调用 close 函数关闭/dev/gpioled的时候就会释放信号量 sem,此时信号量 sem 的值就会加 1,变为 1。信号量 sem 再次有效,表示其他应用程序可以使用 LED 灯了,此时在休眠状态的应用程序 B 就会获取到信号量 sem,获取成功以后就开始使用 LED 灯。
测试APP semaApp.c
#include 3.2 运行测试
1、编译驱动程序(略)
2、编译测试 APP (略)
3、运行测试
加载驱动

测试驱动
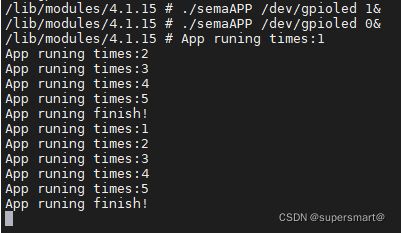
两个命令都是运行在后台,第一条命令先获取到信号量,因此可以操作 LED 灯,将LED 灯打开,并且占有 25S。第二条命令因为获取信号量失败而进入休眠状态,等待第一条命令运行完毕并释放信号量以后才拥有 LED 灯使用权,将 LED 灯关闭,运行结果如上图所示
卸载驱动
![]()