【灵动MM32-DMA传输-GPS解算】 移植NMEA协议库解析GGA数据格式
灵动MM32单片机移植NMEA协议库解算GGA数据格式通过串口dma硬件传输
今天使用一款常见的gps模块,goouuu果云GPS模块,这款产品可以说是便宜好用,但是这个原版本的例程我觉得不太行,解析库的时候太浪费资源,而且兼容性不好。所以我就用灵动mm32在果云GPS模块上移植野火的开发的GPS库文件
用到的硬件和库文件:
①MM32F3277G9P单片机 ②goouuu果云GPS模块模块 ③智能车逐飞MM32开源库 ④野火开源库
逐飞开源库链接: 逐飞科技MM32F327X_G9P开源库
野火GPS模块资料链接
- 灵动MM32单片机移植NMEA协议库解算GGA数据格式通过串口dma硬件传输
-
- 一、模块介绍
- 二、模块引脚说明及模块资源
- 三、NMEA-0183 协议
-
- 3-1协议框架
- 3-2 协议帧格式说明:
- 3-3 GGA数据格式
- 四、NMEA库移植过程
- 五、MM32配置代码
-
- 5-1 GPS接口初始化
-
- GPS_USART_Config函数
- GPS_DMA_Config 函数
- DMA2_Channel3_IRQHandler中断函数
- 5-2 解码测试函数nmea_decode_test()
- 5-3 MM32堆栈空间设置
- 六、主函数调用
一、模块介绍
ATGM336H-5N系列模块是小尺寸的高性能BDS/GNSS全星座定位导航模块系列的总称。
该系列模块产品都是基于中科微第四代低功耗GNSS SOC单芯片—AT6558
支持多种卫星导航系统,包括中国的BDS(北斗卫星导航系统),美国的GPS,俄罗斯的GLONASS,欧盟的GALILEO,日本的QZSS 以及卫星增强系统SBAS ( WAAS,EGNOS,GAGAN,MSAS )。
AT6558是一款真正意义的六合一多模卫星导航定位芯片,包含32个跟踪通道,可以同时接收六个卫星导航系统的GNSS信号,并且实现联合定位导航与授时。

二、模块引脚说明及模块资源
引脚说明:
VCC :电源线,正常电压范围为: 3.3~5V
GND:地线
TXD: 串口数据发送信号线,使用 TTL 电平
RXD: 串口数据接收信号线,使用 TTL 电平
PPS: 时间脉冲信号线,模块接收到 GPS 时间信息后,输出可调节的脉冲信号,默认为 1Hz,脉冲上升沿与 UTC 时间对齐
资源描述:
XH414 法拉电容:
参数为: 3.3V 0.07F。它的功能和锂电池一样,在主电源掉电的时候可以为定位模块的 RTC 部分供电,以使定位模块在下次启动时能快速搜索到卫星,一般可持续供电 1 小时。
有源天线 IPX接口: IPX 接口用于连接有源天线
时间脉冲指示灯:
模块上电后,时间脉冲指示灯即亮,在定位模块接收到时间信息后,时间脉冲信号指示灯会默认以 1Hz 的频率闪烁,该信号频率可以调节。
三、NMEA-0183 协议
NMEA-0183 是一套定义接收机输出的标准信息,有几种不同的格式,每种都是独立相关的 ASCII 格式, 使用逗号隔开数据,数据流长度从 30-100 字符不等,通常以每秒间隔选择输出。
最常用的格式为"GGA",它包含了定位时间,纬度,经度,高度,定位所用的卫星数, DOP 值, 差分状态和校正时段等,其他的有速度,跟踪,日期等。 NMEA 实际上已成为所有的定位接收机中最通用的数据输出格式。
3-1协议框架
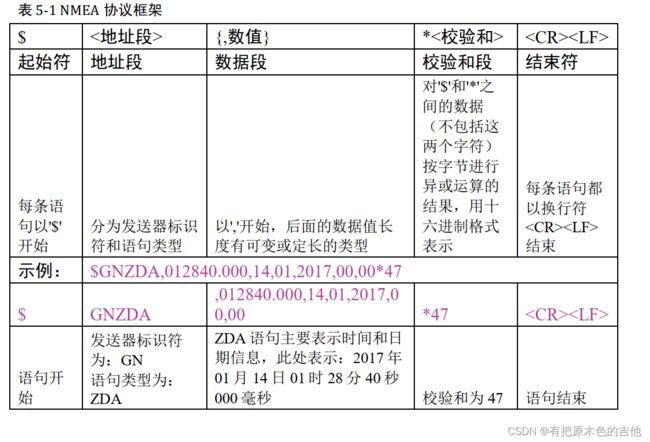
NMEA 语句的数据段为信息主体,不同类型的语句用于传输不同类型的定位信息, 其语句类型又分为两部分, 如 GNZDA 前面两个字符 GN 用于区分定位系统

其中 GN 标识符比较特殊,当发送器具有多模功能时(即同时支持一个以上的定位系统),系统会把各系统的信息整合、 处理后,再把这些综合信息采用 GN 作为标识符发送出来,如前面的时间日期信息, 使用 GNZDA 语句, 在这样的系统中, GP、 BD 等标识符仅用于表示对应系统的卫星信息,如 GPGSA 和 BDGSA 语句分别用于表示美国 GPS 系统和北斗系统的卫星信息。
NMEA-0183 协议定义的语句非常多,但是常用的或者说兼容性最广的语句只有 GGA、RMC、 VTG、 GLL、 ZDA、 GSA、 GSV 等。下面给出这些常用 NMEA-0183 语句的字段定义解释

3-2 协议帧格式说明:
该协议采用 ASCII 码。 帧格式形如: $ aaccc,ddd,ddd,…,ddd * hh < C R >< LF>
<1> “$”——帧命令起始位
<2> aaccc——地址域,前两位为识别符,后三位为语句名
<3> ddd…ddd——数据
<4> “ * ”——校验和前缀
<5> hh——校验和(check sum), $与*之间所有字符 ASCII 码的校验和(各字节做异或运算,得到校验和后,再转换 16 进制格式的 ASCII 字符。)
<6> < CR>< LF>——CR(Carriage Return) + LF(Line Feed)帧结束,回车和换行
3-3 GGA数据格式
GPS 固定数据输出语句(Global positioning system fix data)。
格式:$GNGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>*<15>< CR>< LF >
$GNGGA,012842.000,2253.7220,N,11350.7025,E,1,11,1.5,44.8,M,0.0,M,*44
<1> UTC 时间,格式为 hhmmss.sss
<2> 纬度,格式为 ddmm.mmmm(前导位数不足则补 0)
<3> 纬度半球, N 或 S(北纬或南纬)
<4> 经度,格式为 dddmm.mmmm(前导位数不足则补 0)
<5> 经度半球, E 或 W(东经或西经)
<6> 定位质量指示, 0=定位无效, 1=标准定位, 2=差分定位, 6=估算
<7> 使用卫星数量,从 00 到 12(前导位数不足则补 0)
<8> 水平精确度, 0.5 到 99.9
<9> 天线离海平面的高度, -9999.9 到 9999.9 米
<10> 高度单位, M 表示单位米
<11> 大地椭球面相对海平面的高度(-999.9 到 9999.9)
<12> 高度单位, M 表示单位米
<13> 差分 GPS 数据期限(RTCM SC-104),最后设立 RTCM 传送的秒数量
<14> 差分参考基站标号,从 0000 到 1023(前导位数不足则补 0)
<15> 校验和。
其他数据格式这里就不再介绍
四、NMEA库移植过程
NMEA解码库使用纯 C 语言编写,支持解析 GPGGA,GPGSA ,GPGSV, GPRMC, GPVTG 这五种语句(这五种语句已经提供足够多的 GPS 信息),
解析得的 GPS 数据信息以结构体存储,附加了地理学相关功能,可支持导航等数据工作。
将nmea_decode文件夹复制到工程目录之下

并在keil的设置添加文件路径:

将库文件下的.c文件添加到工程中

五、MM32配置代码
GPS在传输数据的时候是串口接收的,因此大量的数据在串口传输时候,如果使用mcu来进行循环处理,这将大大降低CPU的效率
因此这里选择串口dma,硬件数据传输,但是网上关于灵动单片机的dma配置资源比较少,这里我将我的代码配置出来。
5-1 GPS接口初始化
主要包括串口初始化和串口dma配置
///**
// * @brief GPS_Config gps 初始化
// * @param 无
// * @retval 无
// */
void GPS_Config(void)
{
GPS_USART_Config();
GPS_DMA_Config();
}
GPS_USART_Config函数
主要是对mm32 与定位模块连接的 USART 串口外设作了基本的初始化,除了要注意把波特率配置为 9600,其它跟普通串口配置无异。
/*
* 函数名:GPS_USART_Config
* 描述 :USART GPIO 配置,工作模式配置
* 输入 :无
* 输出 : 无
* 调用 :外部调用
*/
static void GPS_USART_Config(void)
{
uart_init(GPS_UART, GPS_USART_BAUDRATE, GPS_USART_RX, GPS_USART_TX);
uart_rx_irq(GPS_UART, 1);
}
GPS_DMA_Config 函数
MM32DMA相关的宏定义:这部分可以查阅芯片手册得到:
//DMA
#define GPS_USART_DMA_STREAM DMA2_Channel3
#define GPS_DMA_IRQn DMA2_Channel3_IRQn //GPS中断源
#define GPS_USART_DMA_CLK RCC_AHBENR_DMA2
#define GPS_USART_DMA_CHANNEL DMA_Channel_3
/* 外设标志 */
#define GPS_DMA_IT_HT DMA2_IT_HT3 //DMA_IT_HTIF5
#define GPS_DMA_IT_TC DMA2_IT_TC3 //DMA_IT_TCIF5
#define UART_DMAReq_Rx ((uint16_t)0x0040)
/* 中断函数 */
#define GPS_DMA_IRQHANDLER DMA2_Channel3_IRQHandler //GPS使用的DMA中断服务函数
串口接收缓冲区地址宏定义
#define GPS_DATA_ADDR (u32)&UART4->RDR //GPS_DR_Base //GPS使用的串口的数据寄存器地址
#define GPS_RBUFF_SIZE 512 //串口接收缓冲区大小
#define HALF_GPS_RBUFF_SIZE (GPS_RBUFF_SIZE/2) //串口接收缓冲区一半
重点在串口 DMA 的配置,代码如下
/**
* @brief GPS_Interrupt_Config 配置GPS使用的DMA中断
* @param None.
* @retval None.
*/
static void GPS_Interrupt_Config(void)
{
exNVIC_Init_TypeDef NVIC_InitStruct;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStruct.NVIC_IRQChannel = GPS_DMA_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
exNVIC_Init(&NVIC_InitStruct);
}
/**
* @brief GPS_DMA_Config gps dma接收配置
* @param 无
* @retval 无
*/
static void GPS_DMA_Config(void)
{
DMA_InitTypeDef DMA_InitStructure;
/*开启DMA时钟*/
RCC_AHBPeriphClockCmd(GPS_USART_DMA_CLK, ENABLE);
/* 复位初始化DMA数据流 */
DMA_DeInit(GPS_USART_DMA_STREAM);
DMA_StructInit(&DMA_InitStructure);
/*设置DMA源:串口数据寄存器地址*/
DMA_InitStructure.DMA_PeripheralBaseAddr = GPS_DATA_ADDR;
/*内存地址(要传输的变量的指针)*/
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)gps_rbuff;
/*方向:从外设到内存*/
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
/*传输大小DMA_BufferSize=SENDBUFF_SIZE*/
DMA_InitStructure.DMA_BufferSize = GPS_RBUFF_SIZE;
/*外设地址不增*/
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
/*内存地址自增*/
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
/*外设数据单位*/
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
/*内存数据单位 8bit*/
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
/*DMA模式:不断循环*/
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
/*优先级:中*/
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium;
//M2M mode is disabled
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; // 非内存到内存模式
DMA_InitStructure.DMA_Auto_reload = DMA_Auto_Reload_Enable;
/*配置DMA2的数据流3*/
DMA_Init(GPS_USART_DMA_STREAM, &DMA_InitStructure);
// Enable UARTy_DMA1_Channel Transfer complete interrupt
DMA_ITConfig(GPS_USART_DMA_STREAM, DMA_IT_HT|DMA_IT_TC, ENABLE);
/* 配置串口 向 DMA发出请求 */
UART_DMACmd(UART4, UART_DMAReq_EN, ENABLE);
/*使能DMA*/
DMA_Cmd(GPS_USART_DMA_STREAM, ENABLE);
/*配置中断优先级*/
GPS_Interrupt_Config();
}
GPS_DMA_Config 函数主要工作如下: 设置了外设地址为 USART 的数据寄存器,并把数据传输方向设置为从USART 数据寄存器传输到内存变量 gps_rbuff 中,该缓冲区数组大小为 512 字节。
DMA2_Channel3_IRQHandler中断函数
最关键的位置它设置了 DMA 半传输结束中断及全传输结束中断,
//配置 DMA 发送完成后产生中断
DMA_ITConfig(GPS_USART_DMA_STREAM,DMA_IT_HT|DMA_IT_TC,ENABLE);
所以它实际把缓冲区分为成了大小相等的 A/B 两部分,每次 DMA 接收了半个缓冲区大小的数据时(本程序为256 字节),就会引起中断得益于这个机制。
可以设计程序当 DMA 使用缓冲区 A 存储数据时,控制 CPU 使用 B中的数据进行 GPS 解码,当 DMA 使用 B 存储时,控制 CPU 使用 A 进行解码,只要缓冲区的大小设置合适,即可避免前面说到的数据丢失问题,这种处理方式也称“乒乓缓冲”,得名于它像打乒乓球一样,你来我往。
当 DMA 的 半 传 输 中 断 或 全 传 输 中 断 产 生 时 , 进 入 的 中 断 服 务 函 数 调 用 了DMA2_Channel3_IRQHandler函数
void DMA2_Channel3_IRQHandler(void)
{
if(DMA_GetITStatus(GPS_DMA_IT_HT) ) /* DMA 半传输完成 */
{
GPS_HalfTransferEnd = 1; //设置半传输完成标志位
DMA_ClearITPendingBit (GPS_DMA_IT_HT);
}
else if(DMA_GetITStatus(GPS_DMA_IT_TC)) /* DMA 传输完成 */
{
GPS_TransferEnd = 1; //设置传输完成标志位
DMA_ClearITPendingBit(GPS_DMA_IT_TC);
}
}
在 这 个 函 数 处 理 中 , 主 要 是 在 半 传 输 和 全 传 输 结 束 引 起 中 断 时 , 对GPS_HalfTransferEnd 和 GPS_TransferEnd 标志位进行标记, 在解码流程中根据这两个标志使用不同的缓冲区进行处理。
5-2 解码测试函数nmea_decode_test()
解码函数主要是调用函数库中的函数,并加标志位进行处理。
/**
* @brief nmea_decode_test 解码GPS模块信息
* @param 无
* @retval 无
*/
int nmea_decode_test(void)
{
double deg_lat;//转换成[degree].[degree]格式的纬度
double deg_lon;//转换成[degree].[degree]格式的经度
nmeaINFO info; //GPS解码后得到的信息
nmeaPARSER parser; //解码时使用的数据结构
uint8_t new_parse=0; //是否有新的解码数据标志
nmeaTIME beiJingTime; //北京时间
uint8 str_buff[50];
/* 设置用于输出调试信息的函数 */
nmea_property()->trace_func = &trace;
nmea_property()->error_func = &error;
nmea_property()->info_func = &gps_info;
/* 初始化GPS数据结构 */
nmea_zero_INFO(&info);
nmea_parser_init(&parser);
while(1)
{
// for(int t = 0;t<256;t++){uart_putchar(DEBUG_UART,gps_rbuff[t]);}
if(GPS_HalfTransferEnd) /* 接收到GPS_RBUFF_SIZE一半的数据 */
{
/* 进行nmea格式解码 */
nmea_parse(&parser, (const char*)&gps_rbuff[0], HALF_GPS_RBUFF_SIZE, &info);
GPS_HalfTransferEnd = 0; //清空标志位
new_parse = 1; //设置解码消息标志
}
else if(GPS_TransferEnd) /* 接收到另一半数据 */
{
nmea_parse(&parser, (const char*)&gps_rbuff[HALF_GPS_RBUFF_SIZE], HALF_GPS_RBUFF_SIZE, &info);
GPS_TransferEnd = 0;
new_parse =1;
}
if(new_parse) //有新的解码消息
{
/* 对解码后的时间进行转换,转换成北京时间 */
GMTconvert(&info.utc,&beiJingTime,8,1);
/* 输出解码得到的信息 */
// printf("\r\n时间%d-%02d-%02d,%d:%d:%d\r\n", beiJingTime.year+1900, beiJingTime.mon,beiJingTime.day,beiJingTime.hour,beiJingTime.min,beiJingTime.sec);
//info.lat lon中的格式为[degree][min].[sec/60],使用以下函数转换成[degree].[degree]格式
deg_lat = nmea_ndeg2degree(info.lat);
deg_lon = nmea_ndeg2degree(info.lon);
// printf("\r\n纬度:%f,经度%f\r\n",deg_lat,deg_lon);
// printf("\r\n海拔高度:%f 米 ", info.elv);
// printf("\r\n速度:%f km/h ", info.speed);
// printf("\r\n航向:%f 度", info.direction);
// printf("\r\n正在使用的GPS卫星:%d,可见GPS卫星:%d",info.satinfo.inuse,info.satinfo.inview);
// printf("\r\n正在使用的北斗卫星:%d,可见北斗卫星:%d",info.BDsatinfo.inuse,info.BDsatinfo.inview);
// printf("\r\nPDOP:%f,HDOP:%f,VDOP:%f",info.PDOP,info.HDOP,info.VDOP);
/* 显示时间日期 */
sprintf(str_buff," Date:%4d/%02d/%02d ", beiJingTime.year+1900, beiJingTime.mon,beiJingTime.day);
LCD_ShowString(0,2,str_buff,BLACK);
sprintf(str_buff," Time:%02d:%02d:%02d", beiJingTime.hour,beiJingTime.min,beiJingTime.sec);
LCD_ShowString(0,20,str_buff,BLACK);
/* 正在使用的卫星 可见的卫星*/
sprintf(str_buff," GPS:%2d ", info.satinfo.inuse);
LCD_ShowString(150,0,str_buff,BLACK);
/* 正在使用的卫星 可见的卫星*/
sprintf(str_buff," BDS:%2d ", info.BDsatinfo.inuse);
LCD_ShowString(150,20,str_buff,BLACK);
/* 纬度 经度*/
sprintf(str_buff," lat:%.6f ", deg_lat);
LCD_ShowString(0,40,str_buff,BLUE);
sprintf(str_buff," lon:%.6f",deg_lon);
LCD_ShowString(115,40,str_buff,BLUE);
/* 速度 */
sprintf(str_buff," speed:%4.2f km/h", info.speed);
LCD_ShowString(0,60,str_buff,RED);
/* 航向 */
sprintf(str_buff," Angle:%3.2f deg", info.direction);
LCD_ShowString(0,80,str_buff,MAGENTA);
new_parse = 0;
}
}
}
根据串口的内容,紧接着调用 NMEA库函数 nmea_parse 进行解码,解码的结果存放在数据结构变量 info 中,由于解码结果得到的时间信息是格林威治时间,所以在输出解码结果前,调用了 GMTconvert 函数把它转化成北京时间。
使用了 nmea_ndeg2degree 函数把 info.lat 及 info.lon 参数转化到了 deg_lat 和 deg_lon 变量中。
info.lat 及 info.lon 存储的就是纬度、 经度信息,但它们的单位是[degree][min].[sec/60]格式,即 NMEA 语句解码后的原始 ddmm.mmmm 表示的数据,通常在地图上使用的格式都是[degree].[degree], 所以一定要经过这样转换后再使用。
5-3 MM32堆栈空间设置
由于 NMEA 解码库在进行解码时需要动态分配较大的空间,所以我们需要在 MM32的启动文件 startup_mm32f327x_keil.s 文件中对堆栈空间进行修改,本工程中设置的栈空间大小设置为 0x00002000, 堆空间大小设置为 0x0000 0800。
Stack_Size EQU 0x00002000
;这时候为8kb栈空间 实测最大调用为3264b
AREA STACK, NOINIT, READWRITE, ALIGN=3
Stack_Mem SPACE Stack_Size
__initial_sp
; Heap Configuration
; Heap Size (in Bytes) <0x0-0xFFFFFFFF:8>
;
Heap_Size EQU 0x00000800
AREA HEAP, NOINIT, READWRITE, ALIGN=3
__heap_base
Heap_Mem SPACE Heap_Size
__heap_limit
PRESERVE8
THUMB
关于如何查看工程中调用的最大栈空间,可以查看我之前写的博客链接:
Keil STM32查看堆栈使用量及调用链.htm文件
六、主函数调用
#include "headfile.h"
// **************************** 代码区域 ****************************
int main(void)
{
board_init(true); //初始化 UART1 DEBUG输出串口
GPS_Config(); //初始化 GPS DMA加大容量栈空间
Lcd_Init(); LCD_ShowString(0,0,"GPS_TEST",MAGENTA); //初始化 IPS ST7789屏幕
nmea_decode_test(); //GPS解码测试
while(1)
{
}
}
在全部模块初始化结束之后,就可以在屏幕上边参数信息了,包括经纬度和时间等等。
另外:确认天线处在卫星信号良好的位置中, 天线需要正面朝上,并置于室外无遮挡物处。 若把天线置于室内,是无法定位的,卫星信号在室内基本无信号
最后工程文件我将放置在百度网盘链接: https://pan.baidu.com/s/1QRNr87n38MjN-yKf30Uiww提取码:jr2t
不足之处多多指教,工程的我是根据野火的NMEA库移植而来。dma配置部分花费的时间比较多,后来看了灵动官网的一些配置,参考而来。参数手册很重要,一些dma的通道都是从中看来的。