信号与系统(Python) 学习笔记摘录 (1) 信号简介 Intro
- 快速链接:
- 【总目录】信号与系统 学习笔记 Signals and Systems with Python
- (1) 简介 Intro
- (2) 傅里叶 Fourier
- 常用函数的傅里叶变换汇总
- (3) LTI 系统 与 滤波器
- 1. Introduction
- 1.1. 周期信号
- 1.1.1. 连续信号周期
- 1.1.2. 离散信号周期
- 1.1.3. 信号的 Python 表示与绘图
- 1.2. 信号分类
- 1.2.1. 能量信号
- 1.2.2. 功率信号
- 1.2.3. 因果信号
- 1.2.4. 反因果信号
- 1.2.5. 其他类型
- 1.2.6. Remark
- 1.3. 冲激函数
- 1.3.1. 单位冲激函数 Dirac delta function
- 1.3.2. 阶跃函数
- 1.3.3. 广义函数定义
- 1.3.4. 取样性质
- 1.3.5. 导数
- 1.3.6. 尺度变化
- 1.4. LTI 连续系统
- 1.4.1. 微分方程的经典解法
- 1.4.2. 初始值
- 1.4.3. 响应
- 1.4.4. Python 求解系统的响应
- 1.4.5. 冲激响应
- 1.4.6. 阶跃响应
- 1.4.7. Python 冲激响应与阶跃响应
- 1.4.8. 卷积积分 Convolution
- 1.4.9. Python 求卷积积分
- 1.4.10. 连续系统的算子 P
- 1.5. 差分方程
- 1.5.1. 定义
- 1.5.2. 经典解法
- 1.5.3. 初始值
- 1.5.4. 响应
- 1.5.5. Python 求解离散系统的零状态响应
- 1.5.6. 单位脉冲序列
- 1.5.7. 单位阶跃序列
- 1.5.8. 单位脉冲响应
- 1.5.9. 单位阶跃响应
- 1.5.10. Python 求解单位脉冲响应
- 1.5.11. 卷积和
- 1.5.12. Python 求卷积和
- 1.5.13. 差分算子 E
- 1.1. 周期信号
- 信号与系统(Python) 学习笔记摘录 (2) 傅里叶 Fourier
1. Introduction
1.1. 周期信号
- Period Signal
1.1.1. 连续信号周期
- 连续周期信号 f ( t ) f(t) f(t), 周期为 T T T, 满足
f ( t ) = f ( t + m T ) , m = 0 , ± 1 , ± 2 , … f(t) = f(t + mT), \ m = 0, \pm 1, \pm 2, \dots f(t)=f(t+mT), m=0,±1,±2,…- 典型周期连续信号: 余弦信号 cos ω t \cos \omega t cosωt 周期为 T = 2 π ω ( s ) T = \frac{2\pi}{\omega}(s) T=ω2π(s)
1.1.2. 离散信号周期
- 离散周期信号 f ( k ) f(k) f(k), 周期为 N N N, 满足
f ( k ) = f ( k + m N ) , m = 0 , ± 1 , ± 2 , … f(k) = f(k +mN), \ m = 0, \pm 1, \pm 2, \dots f(k)=f(k+mN), m=0,±1,±2,…
1.1.3. 信号的 Python 表示与绘图
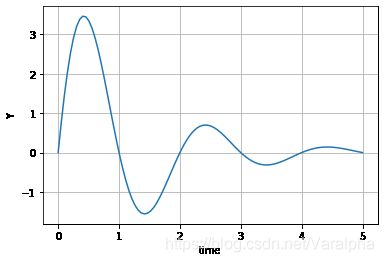
- 连续信号 f ( t ) = 5 e − 0.8 t sin ( π t ) , 0 < t < 5 f(t) = 5 e^{-0.8t} \sin(\pi t), \, 0
# 导入 需要的 library 库
import numpy as np # 科学计算
import matplotlib.pyplot as plt # 画图
import scipy.signal as sg # 导入 scipy 的 signal 库 命名为 sg
a,b = 0.8,5
t = np.linspace(0,5,100) # 另一种表达式 t = np.mgrid[0:5:0.01]
y = b*np.exp(-a*t)*np.sin(np.pi*t)
plt.xlabel('time')
plt.ylabel('Y')
plt.plot(t,y)
plt.grid(True)
plt.show()
1.2. 信号分类
- 将信号 f ( t ) f(t) f(t) 施加于 1 Ω 1 \Omega 1Ω 电阻上, 所消耗的瞬时功率为 ∣ f ( t ) ∣ 2 \lvert f(t) \rvert ^2 ∣f(t)∣2, 在区间 ( − ∞ , ∞ ) ( -\infty, \infty) (−∞,∞) 的能量和平均功率定义为
E = d e f ∫ − ∞ ∞ ∣ f ( t ) ∣ 2 d t E \overset{def}{=} \int_{-\infty}^\infty \lvert f(t) \rvert ^2 dt E=def∫−∞∞∣f(t)∣2dt
P = d e f lim T → ∞ 1 T ∫ − T / 2 T / 2 ∣ f ( t ) ∣ 2 d t P \overset{def}{=} \lim_{T \to \infty} \frac{1}{T} \int_{-T/2}^{T/2} \lvert f(t) \rvert ^2 dt P=defT→∞limT1∫−T/2T/2∣f(t)∣2dt
1.2.1. 能量信号
- 能量有限信号: 信号的能量 E < ∞ E < \infty E<∞ , 简称 能量信号 , 此时 P = 0 P = 0 P=0.
- 离散: E = ∑ k = − ∞ ∞ ∣ f ( k ) ∣ 2 < ∞ E = \displaystyle\sum_{k=-\infty}^{\infty} \lvert f(k) \rvert ^2 < \infty E=k=−∞∑∞∣f(k)∣2<∞
1.2.2. 功率信号
- 功率有限信号: 信号的功率 P < ∞ P < \infty P<∞ , 简称 功率信号 , 此时 E = ∞ E = \infty E=∞.
- 离散: P = lim N → ∞ 1 N ∑ k = − N / 2 N / 2 ∣ f ( k ) ∣ 2 < ∞ P = \displaystyle \lim_{N \to \infty} \frac{1}{N} \sum_{k=-N/2}^{N/2} \lvert f(k) \rvert ^2 < \infty P=N→∞limN1k=−N/2∑N/2∣f(k)∣2<∞
1.2.3. 因果信号
- 因果信号: t < 0 , f ( t ) = 0 t <0, \ f(t) = 0 t<0, f(t)=0 的信号
- 例如: 阶跃信号
1.2.4. 反因果信号
- 反因果信号: t ≤ 0 , f ( t ) = 0 t \leq 0, \ f(t) = 0 t≤0, f(t)=0 的信号
1.2.5. 其他类型
- 一维信号, 多维信号; 实信号,复信号; 左信号, 右信号。。。。。。
1.2.6. Remark
- 时限信号为能量信号
- 周期信号为功率信号
- 非周期信号 可能为能量也可能为功率信号
- f ( t ) = e t f(t) = e^t f(t)=et 既不是能量也不是功率信号
1.3. 冲激函数
δ ( x ) = d e f { 0 , x ≠ 0 1 , x = 0 \begin{aligned} \delta (x) \overset{def}{=} {\begin{cases} 0 , & x\neq 0 \\ 1 , & x = 0 \end{cases}} \end{aligned} δ(x)=def{0,1,x=0x=0
1.3.1. 单位冲激函数 Dirac delta function
- 单位冲激函数: 奇异函数, 强度极大, 作用时间极短的物理量的理想化模型
{ δ ( x ) = 0 , x ≠ 0 ∫ − ∞ ∞ δ ( x ) d x = 1 \begin{aligned} {\begin{cases} \delta (x) = 0 , & x\neq 0 \\ \int_{-\infty}^{\infty} \delta(x) dx = 1 \end{cases}} \end{aligned} {δ(x)=0,∫−∞∞δ(x)dx=1x=0- aka Dirac delta function
- 高度无穷大, 宽度无穷小, 面积为 1 的对称窄脉冲
1.3.2. 阶跃函数
- 阶跃函数:
ε ( t ) = d e f { 0 , t < 0 1 , t > 0 \varepsilon(t) \overset{def}{=} {\begin{cases} 0, & t<0 \\ 1, & t>0 \end{cases}} ε(t)=def{0,1,t<0t>0- 积分: ∫ − ∞ t ε ( τ ) d τ = t ⋅ ε ( t ) \int_{-\infty}^{t} \varepsilon(\tau)d\tau = t \cdot \varepsilon(t) ∫−∞tε(τ)dτ=t⋅ε(t)
- 与 冲激函数 关联:
- δ ( t ) = d ε ( t ) d t \delta(t) = \frac{d \varepsilon(t)}{dt} δ(t)=dtdε(t)
- ε ( t ) = ∫ − ∞ t δ ( τ ) d τ \varepsilon(t) = \int_{-\infty}^{t} \delta(\tau) d\tau ε(t)=∫−∞tδ(τ)dτ
1.3.3. 广义函数定义
- Dirac Delta function 广义函数定义:
∫ − ∞ ∞ δ ( t ) φ ( t ) d t = φ ( 0 ) \int_{-\infty}^{\infty} \delta(t) \varphi(t)dt = \varphi(0) ∫−∞∞δ(t)φ(t)dt=φ(0)- 冲激函数 δ ( t ) \delta (t) δ(t) 作用于检验函数 φ ( t ) \varphi (t) φ(t) 的结果是赋值为 φ ( 0 ) \varphi (0) φ(0), 称为 冲激函数的取样性质。
- 例如:
- 高斯函数 δ ( t ) = lim b → ∞ b e − π ( b ⋅ t ) 2 \delta(t) = \lim_{b\to \infty} b e^{-\pi(b\cdot t)^2} δ(t)=limb→∞be−π(b⋅t)2
- 取样函数 δ ( t ) = lim b → ∞ sin ( b t ) π t \delta(t) = \lim_{b\to \infty} \frac{\sin(bt)}{\pi t} δ(t)=limb→∞πtsin(bt)
1.3.4. 取样性质
- Dirac Delta function 取样性质:
f ( t ) δ ( t − a ) = f ( a ) δ ( t − a ) ⟶ f ( t ) δ ( t ) = f ( 0 ) δ ( t ) f(t) \delta(t-a) = f(a) \delta(t-a) \longrightarrow f(t) \delta(t) = f(0) \delta(t) f(t)δ(t−a)=f(a)δ(t−a)⟶f(t)δ(t)=f(0)δ(t)
∫ − ∞ ∞ f ( t ) δ ( t − a ) d t = f ( a ) ⟶ ∫ − ∞ ∞ f ( t ) δ ( t ) d t = f ( 0 ) \int_{-\infty}^{\infty} f(t) \delta(t-a) dt = f(a) \longrightarrow \int_{-\infty}^{\infty} f(t) \delta(t) dt = f(0) ∫−∞∞f(t)δ(t−a)dt=f(a)⟶∫−∞∞f(t)δ(t)dt=f(0)- Notice: 积分区间要包含 t = a t=a t=a
1.3.5. 导数
- Dirac Delta function 导数:
- 冲激偶 δ ′ ( t ) \delta^\prime (t) δ′(t):
f ( t ) δ ′ ( t ) = f ( 0 ) δ ′ ( t ) − f ′ ( 0 ) δ ( t ) f(t) \delta^\prime (t) = f(0)\delta^\prime(t) - f^\prime(0)\delta(t) f(t)δ′(t)=f(0)δ′(t)−f′(0)δ(t)
∫ − ∞ ∞ f ( t ) δ ′ ( t ) d t = − f ′ ( 0 ) \int_{-\infty}^{\infty} f(t) \delta^\prime(t) dt = - f^\prime(0) ∫−∞∞f(t)δ′(t)dt=−f′(0)
∫ − ∞ ∞ f ( t ) δ ′ ( t − a ) d t = − f ′ ( a ) \int_{-\infty}^{\infty} f(t) \delta^\prime(t-a) dt = - f^\prime(a) ∫−∞∞f(t)δ′(t−a)dt=−f′(a)
∫ − ∞ ∞ f ( t ) δ ( n ) ( t ) d t = ( − 1 ) n f ( n ) ( 0 ) \int_{-\infty}^{\infty} f(t) \delta^{(n)}(t) dt = (-1)^nf^{(n)}(0) ∫−∞∞f(t)δ(n)(t)dt=(−1)nf(n)(0)
- 冲激偶 δ ′ ( t ) \delta^\prime (t) δ′(t):
1.3.6. 尺度变化
- Dirac Delta function 尺度变化:
δ ( a t ) = 1 ∣ a ∣ δ ( t ) \delta(at) = \frac{1}{\lvert a \rvert} \delta(t) δ(at)=∣a∣1δ(t)
δ ( n ) ( a t ) = 1 ∣ a ∣ 1 a n δ ( n ) ( t ) \delta^{(n)} (at) = \frac{1}{\lvert a \rvert} \frac{1}{a^n} \delta^{(n)}(t) δ(n)(at)=∣a∣1an1δ(n)(t)
1.4. LTI 连续系统
f ( t ) → LTI (linear time-invariant systems) → y ( t ) f(t) \to \text{LTI (linear time-invariant systems)} \to y(t) f(t)→LTI (linear time-invariant systems)→y(t)
1.4.1. 微分方程的经典解法
y ( n ) ( t ) + a n − 1 y ( n − 1 ) ( t ) + ⋯ + a 1 y ( 1 ) ( t ) + a 0 y ( t ) = b m f ( m ) ( t ) + b m − 1 f ( m − 1 ) ( t ) + ⋯ + b 1 f ( 1 ) ( t ) + b 0 f ( t ) y^{(n)}(t) + a_{n-1}y^{(n-1)}(t)+\dots + a_1y^{(1)}(t) + a_0y(t) \\ = b_mf^{(m)}(t)+b_{m-1}f^{(m-1)}(t) + \dots + b_1f^{(1)}(t) +b_0f(t) y(n)(t)+an−1y(n−1)(t)+⋯+a1y(1)(t)+a0y(t)=bmf(m)(t)+bm−1f(m−1)(t)+⋯+b1f(1)(t)+b0f(t)
-
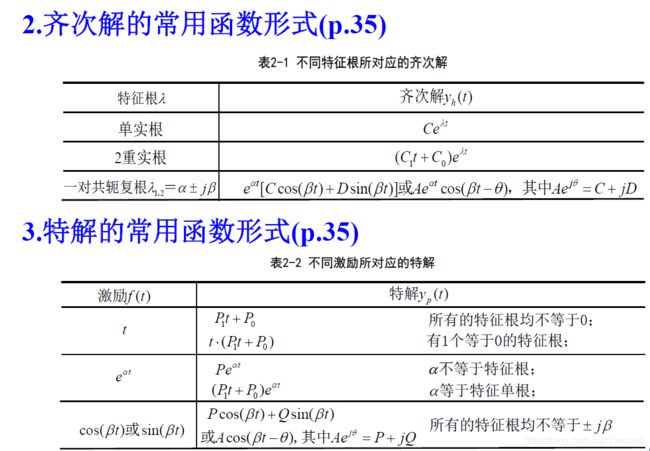
经典解法: y ( t ) = y h ( t ) + y p ( t ) y(t) = y_h(t) + y_p(t) y(t)=yh(t)+yp(t)
- y ( t ) y(t) y(t) 完全解
- y h ( t ) y_h(t) yh(t) 齐次解 homogeneous solution
- y p ( t ) y_p(t) yp(t) 特解
-
特征根: eigenvalue 特征值
λ n + a n − 1 λ n − 1 + ⋯ + a 0 = 0 → λ i ( i = 1 , 2 , … , n ) \lambda^n + a_{n-1}\lambda^{n-1} + \dots + a_0 = 0\, \to\, \lambda_i(i=1,2,\dots, n) λn+an−1λn−1+⋯+a0=0→λi(i=1,2,…,n)
1.4.2. 初始值
-
初始值: 是n阶系统在 t = 0 t=0 t=0 时接入激励, 其响应在 t = 0 + t=0_+ t=0+ 时刻的值, 即 y ( j ) ( 0 + ) ( j = 0 , 1 , 2 , … , n − 1 ) y^{(j)}(0_+) \, (j=0,1,2,\dots,{n-1}) y(j)(0+)(j=0,1,2,…,n−1)
-
初始状态: 是系统在激励尚未接入的 t = 0 − t=0_- t=0− 时刻的响应值 y ( j ) ( 0 − ) y^{(j)}(0_-) y(j)(0−), 该值反映了系统的历史情况,且与激励无关。
1.4.3. 响应
y ( t ) = y z i ( t ) + y z s ( t ) y(t) = y_{zi}(t) + y_{zs}(t) y(t)=yzi(t)+yzs(t)
-
零输入响应: y z i ( t ) y_{zi}(t) yzi(t) (zero input)
-
零状态响应: y z s ( t ) y_{zs}(t) yzs(t) (zero status)
- y z s ( 0 − ) = 0 ⟶ y z i ( 0 + ) = y z i ( 0 − ) = y ( 0 − ) y_{zs}(0_-) = 0 \longrightarrow y_{zi}(0_+)=y_{zi}(0_-)=y(0_-) yzs(0−)=0⟶yzi(0+)=yzi(0−)=y(0−)
-
响应分类:
- 固有响应:系统固有频率 或叫自由响应
- 强迫响应:与激励函数有关
- 暂态响应:随时间增长而消失
- 稳态响应:通常为阶跃函数和周期
1.4.4. Python 求解系统的响应
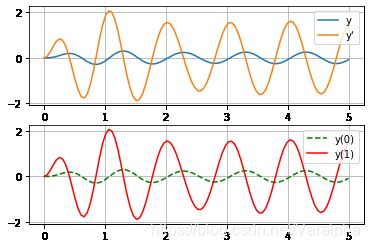
- 系统的微分方程为
77 y ( t ) + 2 d d t y ( t ) + d 2 d t 2 y ( t ) = f ( t ) 77 y{\left(t \right)} + 2 \frac{d}{d t} y{\left(t \right)} + \frac{d^{2}}{d t^{2}} y{\left(t \right)} = f(t) 77y(t)+2dtdy(t)+dt2d2y(t)=f(t)- 在 t ≥ 0 t\geq0 t≥0 时,接入激励 f ( t ) = 10 sin ( 2 π t ) f(t)=10\sin(2\pi t) f(t)=10sin(2πt), 求零状态响应
- 可得 y ′ ′ ( t ) = − 77 y ( t ) − 2 y ′ ( t ) + f ( t ) , t ≥ 0 y^{\prime\prime}{\left(t \right)} = - 77 y{\left(t \right)} - 2 y^{\prime}{\left(t \right)} + f(t) , \, t\geq0 y′′(t)=−77y(t)−2y′(t)+f(t),t≥0
# 使用方程解
from scipy.integrate import odeint, solve_bvp, solve_ivp
# odeint: Integrate a system of ordinary differential equations
# solve_bvp: Solve a boundary-value problem for a system of ODEs
# solve_ivp: Solve an initial value problem for a system of ODEs
# 一阶微分方程组
def fvdp(t,y):
'''
来源:https://www.jianshu.com/p/ab57b600b854?utm_campaign=shakespeare
要把y看出一个向量,y = [dy0,dy1,dy2,...]分别表示y的n阶导
对于二阶微分方程,肯定是由0阶和1阶函数组合而成的,所以下面把y看成向量的话,y0表示最初始的函数,也就是我们要求解的函数,y1表示一阶导,对于高阶微分方程也可以以此类推
'''
y0, y1 = y
ft = 10*np.sin(2*np.pi*t)
y2 = -2*y1-77*y0+ft
# y0是需要求解的函数,y1是一阶导
# 返回的顺序是[一阶导, 二阶导],这就形成了一阶微分方程组
return [y1, y2]
y0 = [0, 0] # 初值[0,0]表示y(0)=0,y'(0)=0
t = np.linspace(0,5,100)
y = odeint(fvdp, y0, t, tfirst=True) # 用 odeint 计算 y(t)
y_ = solve_ivp(fvdp, t_span=(0,5), y0=y0, t_eval=t) # 用 solve_ivp 计算 y(t)
# 开始绘图
plt.subplot(211)
y1, = plt.plot(t, y[:,0], label='y')
y1_, = plt.plot(t,y[:,1],label='y‘')
plt.legend(handles=[y1,y1_], loc='upper right')
plt.grid(True)
plt.subplot(212)
y2, = plt.plot(y_.t, y_.y[0,:],'g--',label='y(0)')
y2_, = plt.plot(y_.t, y_.y[1,:],'r-',label='y(1)')
plt.legend(handles=[y2,y2_], loc='upper right')
plt.grid(True)
plt.show()
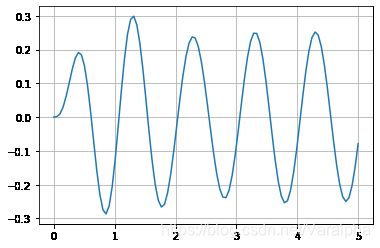
# 用已有库的方法解 sg is scipy.signal
sys = sg.lti([1],[1, 2, 77]) # 方程里的系数
ft = 10*np.sin(2*np.pi*t)
_,y,_ = sg.lsim(sys,ft,T=t)
# 开始绘图
plt.plot(t,y,label='simple way')
plt.grid(True)
plt.show()
1.4.5. 冲激响应
- 由单位冲激函数 δ ( t ) \delta(t) δ(t) 所引起的零状态响应,记为 h ( t ) h(t) h(t) 。
- δ ( t ) → LTI → h ( t ) \delta(t) \to \text{LTI} \to h(t) δ(t)→LTI→h(t)
- 隐含条件:
f ( t ) = δ ( t ) f(t) = \delta(t) f(t)=δ(t)
对二阶系统 h ( 0 − ) = h ′ ( 0 − ) = 0 h(0_-) = h^\prime(0_-) = 0 h(0−)=h′(0−)=0
1.4.6. 阶跃响应
-
由单位阶跃函数 ε ( t ) \varepsilon(t) ε(t) 所引起的零状态响应,记为 g ( t ) g(t) g(t)
- ε ( t ) → LTI → g ( t ) \varepsilon(t) \to \text{LTI} \to g(t) ε(t)→LTI→g(t)
- 隐含条件:
f ( t ) = ε ( t ) f(t) = \varepsilon(t) f(t)=ε(t)
g ( 0 − ) = g ′ ( 0 − ) = 0 g(0_-)=g^\prime(0_-)=0 g(0−)=g′(0−)=0
-
关联:
g ( t ) = ∫ − ∞ t h ( τ ) d τ g(t) = \int^t_{-\infty} h(\tau) d\tau g(t)=∫−∞th(τ)dτ
h ( t ) = d d t g ( t ) h(t) = \frac{d }{d t}g(t) h(t)=dtdg(t)
1.4.7. Python 冲激响应与阶跃响应
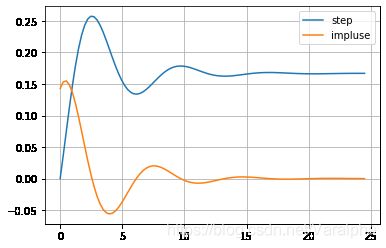
- 求以下系统的冲激响应和阶跃响应:
7 y ′ ′ ( t ) + 4 y ′ ( t ) + 6 y ( t ) = f ′ ( t ) + f ( t ) 7y^{\prime\prime}(t) + 4y^{\prime}(t) + 6y(t) = f^\prime(t) + f(t) 7y′′(t)+4y′(t)+6y(t)=f′(t)+f(t)
sys = sg.lti([1,1],[7,4,6]) # 方程里的系数 由高次幂到低次幂
st, sy = sg.step2(sys)
it, iy = sg.impulse2(sys)
sy1, = plt.plot(st, sy, label='step')
iy1, = plt.plot(it, iy, label='impluse')
# 开始绘图
plt.legend(handles=[sy1,iy1], loc='upper right')
plt.grid(True)
plt.show()
1.4.8. 卷积积分 Convolution
-
来源 f ^ ( t ) = ∑ n = − ∞ ∞ f ( n Δ ) Δ p ( t − n Δ ) \hat{f}(t) = \displaystyle\sum_{n=-\infty}^{\infty} f(n\Delta)\Delta p(t-n\Delta) f^(t)=n=−∞∑∞f(nΔ)Δp(t−nΔ) , p 为脉冲
lim Δ → 0 f ^ ( t ) = f ( t ) = ∫ − ∞ ∞ f ( τ ) δ ( t − τ ) d τ \lim_{\Delta\to0} \hat{f}(t) = f(t) = \int_{-\infty}^{\infty} f(\tau)\delta(t-\tau)d\tau Δ→0limf^(t)=f(t)=∫−∞∞f(τ)δ(t−τ)dτ -
由 ∫ − ∞ ∞ f ( τ ) δ ( t − τ ) d τ ⟶ ∫ − ∞ ∞ f ( τ ) h ( t − τ ) d τ \int_{-\infty}^{\infty} f(\tau)\delta(t-\tau)d\tau \longrightarrow \int_{-\infty}^{\infty} f(\tau)h(t-\tau)d\tau ∫−∞∞f(τ)δ(t−τ)dτ⟶∫−∞∞f(τ)h(t−τ)dτ
可得 f ( t ) → LTI → y z s ( t ) f(t) \to \text{LTI} \to y_{zs}(t) f(t)→LTI→yzs(t)- 卷积积分 y z s = ∫ − ∞ ∞ f ( τ ) h ( t − τ ) d τ y_{zs}= \int_{-\infty}^{\infty} f(\tau)h(t-\tau)d\tau yzs=∫−∞∞f(τ)h(t−τ)dτ
-
定义:
- f 1 f_1 f1 与 f 2 f_2 f2 的 卷积: f ( t ) = ∫ − ∞ ∞ f 1 ( τ ) f 2 ( t − τ ) d τ f(t) = \int_{-\infty}^{\infty} f_1(\tau)f_2(t-\tau)d\tau f(t)=∫−∞∞f1(τ)f2(t−τ)dτ
- 记为 f ( t ) = f 1 ( t ) ⋆ f 2 ( t ) f(t) = f_1(t) \star f_2(t) f(t)=f1(t)⋆f2(t)
-
代数性质:
- 三定律:
- 交换律: f 1 ⋆ f 2 = f 2 ⋆ f 1 f_1 \star f_2 = f_2 \star f_1 f1⋆f2=f2⋆f1
- 分配律: f 1 ⋆ [ f 2 + f 3 ] = f 1 ⋆ f 2 + f 1 ⋆ f 3 f_1 \star [f_2 + f_3] = f_1\star f_2 + f_1 \star f_3 f1⋆[f2+f3]=f1⋆f2+f1⋆f3
- 结合律: [ f 1 ⋆ f 2 ] ⋆ f 3 = f 1 ⋆ [ f 2 ⋆ f 3 ] [f_1\star f_2]\star f_3 = f_1\star [f_2 \star f_3] [f1⋆f2]⋆f3=f1⋆[f2⋆f3]
- 三定律:
-
特性:
- f ( t ) ⋆ δ ( t − t 0 ) = δ ( t − t 0 ) ⋆ f ( t ) = f ( t − t 0 ) f(t)\star\delta(t-t_0) = \delta(t-t_0) \star f(t) = f(t-t_0) f(t)⋆δ(t−t0)=δ(t−t0)⋆f(t)=f(t−t0)
- f ( t ) ⋆ δ ( n ) ( t ) = f ( n ) ( t ) f(t)\star \delta^{(n)}(t) = f^{(n)}(t) f(t)⋆δ(n)(t)=f(n)(t)
- f ( t ) ⋆ ε ( t ) = ∫ − ∞ t f ( τ ) d τ f(t) \star \varepsilon(t) = \int_{-\infty}^{t} f(\tau)d\tau f(t)⋆ε(t)=∫−∞tf(τ)dτ
- ε ( t ) ⋆ ε ( t ) = t ⋅ ε ( t ) \varepsilon(t) \star \varepsilon(t) = t \cdot \varepsilon(t) ε(t)⋆ε(t)=t⋅ε(t)
- 衍生:
- f ( t ) = f 1 ( t ) ⋆ f 2 ( t ) f(t) = f_1(t)\star f_2(t) f(t)=f1(t)⋆f2(t)
- f ( t − t 1 − t 2 ) = f 1 ( t − t 1 ) ⋆ f 2 ( t − t 2 ) = f 1 ( t − t 1 − t 2 ) ⋆ f 2 ( t ) = f 1 ⋆ f 2 ( t − t 1 − t 2 ) f(t-t_1-t_2) = f_1(t-t_1)\star f_2(t-t_2) = f_1(t-t_1-t_2)\star f_2(t) = f_1 \star f_2(t-t_1-t_2) f(t−t1−t2)=f1(t−t1)⋆f2(t−t2)=f1(t−t1−t2)⋆f2(t)=f1⋆f2(t−t1−t2)
-
微分特性:
- d n d t n [ f 1 ( t ) ⋆ f 2 ( t ) ] = f 1 ( n ) ( t ) ⋆ f 2 ( t ) = f 1 ( t ) ⋆ f 2 ( n ) ( t ) \frac{d^n}{d t^n}[f_1(t) \star f_2(t)] = f_1^{(n)}(t) \star f_2(t) = f_1(t) \star f_2^{(n)}(t) dtndn[f1(t)⋆f2(t)]=f1(n)(t)⋆f2(t)=f1(t)⋆f2(n)(t)
- ∫ − ∞ t [ f 1 ( τ ) ⋆ f 2 ( τ ) ] d τ = [ ∫ − ∞ t f 1 ( τ ) d τ ] ⋆ f 2 ( t ) = f 1 ( t ) ⋆ [ ∫ − ∞ t f 2 ( τ ) d τ ] \int_{-\infty}^{t}[f_1(\tau) \star f_2(\tau)]d\tau = [\int_{-\infty}^{t}f_1(\tau)d\tau]\star f_2(t) = f_1(t) \star [\int_{-\infty}^{t}f_2(\tau)d\tau] ∫−∞t[f1(τ)⋆f2(τ)]dτ=[∫−∞tf1(τ)dτ]⋆f2(t)=f1(t)⋆[∫−∞tf2(τ)dτ]
- if f 1 ( − ∞ ) = 0 or f 2 ( − 1 ) ( ∞ ) = 0 , then f 1 ( t ) ⋆ f 2 ( t ) = f 1 ′ ( t ) ⋆ f 2 ( − 1 ) ( t ) f_1(-\infty) = 0 \, \text{or} \, f_2^{(-1)}(\infty)=0, \, \text{then} \, f_1(t)\star f_2(t) = f_1^\prime(t) \star f_2^{(-1)}(t) f1(−∞)=0orf2(−1)(∞)=0,thenf1(t)⋆f2(t)=f1′(t)⋆f2(−1)(t)
-
常用公式汇总:
- K ⋆ f ( t ) = K ⋅ [ f ( t ) 净面积 ] K \star f(t) = K \cdot [f(t) \text{净面积}] K⋆f(t)=K⋅[f(t)净面积]
- f ( t ) ⋆ δ ( t ) = f ( t ) f(t) \star \delta(t) = f(t) f(t)⋆δ(t)=f(t)
- f ( t ) ⋆ δ ′ ( t ) = f ′ ( t ) ⋆ δ ( t ) = f ′ ( t ) f(t) \star \delta^\prime(t) = f^\prime(t) \star \delta(t) = f^\prime(t) f(t)⋆δ′(t)=f′(t)⋆δ(t)=f′(t)
- f ( t ) ⋆ ε ( t ) = f ( t ) ⋆ δ ( − 1 ) ( t ) = f ( − 1 ) ( t ) ⋆ δ ( t ) = f ( − 1 ) ( t ) f(t) \star \varepsilon(t) = f(t) \star \delta^{(-1)} (t) = f^{(-1)}(t) \star \delta(t) = f^{(-1)}(t) f(t)⋆ε(t)=f(t)⋆δ(−1)(t)=f(−1)(t)⋆δ(t)=f(−1)(t)
- ε ( t ) ⋆ ε ( t ) = t ⋅ ε ( t ) \varepsilon(t) \star \varepsilon(t) = t \cdot \varepsilon(t) ε(t)⋆ε(t)=t⋅ε(t)
- e − α t ε ( t ) ⋆ e − α t ε ( t ) = t ⋅ e − α t ε ( t ) e^{-\alpha t}\varepsilon(t) \star e^{-\alpha t}\varepsilon(t) = t\cdot e^{-\alpha t}\varepsilon(t) e−αtε(t)⋆e−αtε(t)=t⋅e−αtε(t)
- e − α 1 t ε ( t ) ⋆ e − α 2 t ε ( t ) = 1 α 2 − α 1 ( e − α 1 t − e − α 2 t ) ε ( t ) ( α 1 ≠ α 2 ) e^{-\alpha_1 t}\varepsilon(t) \star e^{-\alpha_2 t}\varepsilon(t) =\displaystyle\frac{1}{\alpha_2 - \alpha_1}(e^{-\alpha_1 t} - e^{-\alpha_2 t})\varepsilon(t) \, (\alpha_1 \neq \alpha_2) e−α1tε(t)⋆e−α2tε(t)=α2−α11(e−α1t−e−α2t)ε(t)(α1=α2)
- ε ( t ) ⋆ e − α t ε ( t ) = 1 α ( 1 − e − α t ) ε ( t ) \varepsilon(t) \star e^{-\alpha t}\varepsilon(t) = \frac{1}{\alpha} (1-e^{-\alpha t})\varepsilon(t) ε(t)⋆e−αtε(t)=α1(1−e−αt)ε(t)
- f ( t ) ⋆ δ T ( t ) = f ( t ) ⋆ ∑ m = − ∞ ∞ δ ( t − m T ) = ∑ m = − ∞ ∞ f ( t − m T ) f(t) \star \delta_T (t) = f(t) \star \displaystyle \sum^{\infty}_{m=-\infty} \delta(t-mT) = \sum^{\infty}_{m=-\infty} f(t-mT) f(t)⋆δT(t)=f(t)⋆m=−∞∑∞δ(t−mT)=m=−∞∑∞f(t−mT)
- 周期为 T T T 的周期单位冲激函数序列 δ T ( t ) = ∑ m = − ∞ ∞ δ ( t − m T ) \delta_T(t) = \sum^\infty_{m=-\infty} \delta(t-mT) δT(t)=∑m=−∞∞δ(t−mT) , 常称为梳状 comb 函数。
-
相关函数:
- 雷达卷积函数:
R 12 ( t ) = f 1 ( t ) ⋆ f 2 ( − t ) = ∫ − ∞ ∞ f 1 ( τ ) f 2 ( τ − t ) d τ = ∫ − ∞ ∞ f 1 ( τ + t ) f 2 ( τ ) d τ = R 21 ( − t ) R_{12} (t) = f_1(t) \star f_2(-t) = \int_{-\infty}^{\infty}f_1(\tau)f_2(\tau-t)d\tau = \int_{-\infty}^{\infty}f_1(\tau+t)f_2(\tau)d\tau = R_{21}(-t) R12(t)=f1(t)⋆f2(−t)=∫−∞∞f1(τ)f2(τ−t)dτ=∫−∞∞f1(τ+t)f2(τ)dτ=R21(−t)
R 21 ( t ) = f 1 ( − t ) ⋆ f 2 ( t ) = ∫ − ∞ ∞ f 1 ( τ ) f 2 ( τ + t ) d τ = ∫ − ∞ ∞ f 1 ( τ − t ) f 2 ( τ ) d τ = R 12 ( − t ) R_{21} (t) = f_1(-t) \star f_2(t) = \int_{-\infty}^{\infty}f_1(\tau)f_2(\tau+t)d\tau = \int_{-\infty}^{\infty}f_1(\tau-t)f_2(\tau)d\tau = R_{12}(-t) R21(t)=f1(−t)⋆f2(t)=∫−∞∞f1(τ)f2(τ+t)dτ=∫−∞∞f1(τ−t)f2(τ)dτ=R12(−t)- Normally R 12 ( τ ) ≠ R 21 ( τ ) R_{12}(\tau) \neq R_{21}(\tau) R12(τ)=R21(τ)
- 自相关函数:
R ( t ) = f ( t ) ⋆ f ( − t ) = ∫ − ∞ ∞ f ( τ ) f ( τ − t ) d τ = ∫ − ∞ ∞ f ( τ + t ) f ( τ ) d τ = R ( − t ) R (t) = f(t) \star f(-t) = \int_{-\infty}^{\infty}f(\tau)f(\tau-t)d\tau = \int_{-\infty}^{\infty}f(\tau+t)f(\tau)d\tau = R(-t) R(t)=f(t)⋆f(−t)=∫−∞∞f(τ)f(τ−t)dτ=∫−∞∞f(τ+t)f(τ)dτ=R(−t)
- 雷达卷积函数:
-
其他:
- 多径传输中存在失真问题, 发射机经某些物体反射产生回波现象,就算是反射信号也被采集。
把在多条路径上 由延迟时间与衰减系数 的情况 称为混响。
为了从 有干扰信号的回波系统中提取正常信号,可以设计逆系统进行补偿。
e ( t ) → 回波系统 h ( t ) → r ( t ) → 逆系统 h i ( t ) → e ( t ) e(t) \to \text{回波系统} h(t) \to r(t) \to \text{逆系统} h_i (t) \to e(t) e(t)→回波系统h(t)→r(t)→逆系统hi(t)→e(t)
为了保证 输出为原激励信号 e ( t ) = e ( t ) ⋆ δ ( t ) e(t) = e(t) \star \delta (t) e(t)=e(t)⋆δ(t) 必须满足 h ( t ) ⋆ h i ( t ) = δ ( t ) h(t) \star h_i(t) = \delta(t) h(t)⋆hi(t)=δ(t)
求 h i ( t ) h_i(t) hi(t) 的问题 称为 解卷积 或 反卷积 - 自适应滤波器 AF (Adaptive Filter) 可以根据误差信号调整系数 去对消 噪声信号,使得输出信号趋近于真实信号。
- 多径传输中存在失真问题, 发射机经某些物体反射产生回波现象,就算是反射信号也被采集。
1.4.9. Python 求卷积积分
- 已知两个连续时间信号为:
f 1 ( t ) = { 2 , 0 < t < 1 0 , else f 2 ( t ) = { t , 0 < t < 2 0 , else f_1(t) = \begin{cases} 2, \, & 0
# sg is scipy.signal
t1 = np.array([t*0.1 for t in range(-10,31)]) # t in [-1, 3]
f1t = np.array([2 if 0<t<10 else 0 for t in range(-10,31)])
t2 = np.array([t*0.1 for t in range(-10,31)]) # t in [-1,3]
f2t = np.array([t*0.1 if 0<t<20 else 0 for t in range(-10,31)])
yt = sg.convolve(f1t, f2t,'full')*0.1 # 计算卷积 calculate convolution
t3 = np.array([t*0.1 for t in range(-20,61)]) # t in [-1+-1, 3+3]
# 开始绘图
plt.plot(t3, yt, label='conv')
plt.grid(True)
plt.show()

1.4.10. 连续系统的算子 P
-
微分算子: P = d d t P = \frac{d}{dt} P=dtd ; P ( n ) = d n d t n P^{(n)} = \frac{d^n}{dt^n} P(n)=dtndn
-
积分算子: P − 1 = ∫ − ∞ t ( ⋅ ) d τ P^{-1} = \int^{t}_{-\infty} (\cdot) d\tau P−1=∫−∞t(⋅)dτ
-
性质:
- P P P 的 正幂 多项式可以因式分解
- 设 A ( P ) , B ( P ) A(P), B(P) A(P),B(P) 为 P P P 的正幂多项式,则 A ( P ) B ( P ) = B ( P ) A ( P ) A(P)B(P) = B(P)A(P) A(P)B(P)=B(P)A(P)
- 微分算子方程公因子 不能随意 消去
- 设 A ( P ) , B ( P ) , D ( P ) A(P), B(P), D(P) A(P),B(P),D(P) 为 P P P 的正幂多项式,
有 D ( P ) ⋅ [ A ( P ) D ( P ) ⋅ B ( P ) ] f ( t ) = A ( P ) B ( P ) f ( t ) \displaystyle D(P) \cdot [\frac{A(P)}{D(P)\cdot B(P)}]f(t) = \frac{A(P)}{B(P)}f(t) D(P)⋅[D(P)⋅B(P)A(P)]f(t)=B(P)A(P)f(t)
但 A ( P ) D ( P ) ⋅ B ( P ) [ D ( p ) f ( t ) ] ≠ A ( P ) B ( P ) f ( t ) \displaystyle\frac{A(P)}{D(P)\cdot B(P)}[D(p)f(t)] \neq \frac{A(P)}{B(P)}f(t) D(P)⋅B(P)A(P)[D(p)f(t)]=B(P)A(P)f(t)
-
传输算子:
H ( P ) = B ( P ) A ( P ) = b m P m + b m − 1 P m − 1 + ⋯ + b 0 P n + a n − 1 P n − 1 + ⋯ + a 0 H(P) = \displaystyle \frac{B(P)}{A(P)} = \frac{b_m P^m+ b_{m-1} P^{m-1} + \dots + b_0}{P^n + a_{n-1}P^{n-1} + \dots + a_0} H(P)=A(P)B(P)=Pn+an−1Pn−1+⋯+a0bmPm+bm−1Pm−1+⋯+b0
1.5. 差分方程
1.5.1. 定义
-
一阶差分:
一阶前向差分 Δ f ( k ) Δ k = f ( k + 1 ) − f ( k ) ( k + 1 ) − k ⟶ Δ f ( k ) = f ( k + 1 ) − f ( k ) \text{一阶前向差分}\, \displaystyle \frac{\Delta f(k)}{\Delta k} = \frac{f(k+1)-f(k)}{(k+1)-k} \\ \longrightarrow \Delta f(k) = f(k+1) - f(k) 一阶前向差分ΔkΔf(k)=(k+1)−kf(k+1)−f(k)⟶Δf(k)=f(k+1)−f(k)
一阶后向差分 ∇ f ( k ) ∇ k = f ( k ) − f ( k − 1 ) k − ( k − 1 ) ⟶ ∇ f ( k ) = f ( k ) − f ( k − 1 ) \text{一阶后向差分}\, \displaystyle \frac{\nabla f(k)}{\nabla k} = \frac{f(k)-f(k-1)}{k-(k-1)} \\ \longrightarrow \nabla f(k) = f(k) - f(k-1) 一阶后向差分∇k∇f(k)=k−(k−1)f(k)−f(k−1)⟶∇f(k)=f(k)−f(k−1) -
线性性质:
∇ [ α f 1 ( k ) + b f 2 ( k ) ] = α ∇ f 1 ( k ) + b ∇ f 2 ( k ) \nabla[\alpha f_1(k) + bf_2(k)] = \alpha \nabla f_1(k) + b\nabla f_2(k) ∇[αf1(k)+bf2(k)]=α∇f1(k)+b∇f2(k) -
二阶差分:
∇ 2 f ( k ) = ∇ [ ∇ f ( k ) ] = f ( k ) − 2 f ( k − 1 ) + f ( k − 2 ) \nabla^2 f(k) = \nabla[\nabla f(k)] = f(k) - 2f(k-1) + f(k-2) ∇2f(k)=∇[∇f(k)]=f(k)−2f(k−1)+f(k−2) -
m阶差分:
∇ m f ( k ) = f ( k ) + b 1 f ( k − 1 ) + ⋯ + b m f ( k − m ) \nabla^{m} f(k) = f(k) + b_1f(k-1) + \dots + b_mf(k-m) ∇mf(k)=f(k)+b1f(k−1)+⋯+bmf(k−m)
1.5.2. 经典解法
- 差分方程 本质上是 递推的代数方程, 若已知初始条件和激励, 利用迭代法可求其数值解。
y ( k ) + a n − 1 y ( k − 1 ) + ⋯ + a 0 y ( k − n ) = b m f ( k ) + b m − 1 f ( k − 1 ) + ⋯ + b 0 f ( k − m ) y(k) + a_{n-1}y(k-1)+\dots + a_0y(k-n) \\ = b_mf(k)+b_{m-1}f^(k-1) + \dots + b_0f(k-m) y(k)+an−1y(k−1)+⋯+a0y(k−n)=bmf(k)+bm−1f(k−1)+⋯+b0f(k−m)
-
经典解法: y ( k ) = y h ( k ) + y p ( k ) y(k) = y_h(k) + y_p(k) y(k)=yh(k)+yp(k)
- y ( k ) y(k) y(k) 完全解
- y h ( k ) y_h(k) yh(k) 齐次解 homogeneous solution
y ( k ) + a n − 1 y ( k − 1 ) + ⋯ + a 0 y ( k − n ) = 0 y(k) + a_{n-1}y(k-1)+\dots + a_0y(k-n) = 0 y(k)+an−1y(k−1)+⋯+a0y(k−n)=0 - y p ( k ) y_p(k) yp(k) 特解
-
特征根: eigenvalue 特征值
1 + a n − 1 λ − 1 + ⋯ + a 0 λ − n = 0 → λ i ( i = 1 , 2 , … , n ) 1 + a_{n-1}\lambda^{-1} + \dots + a_0\lambda^{-n} = 0\, \to\, \lambda_i(i=1,2,\dots, n) 1+an−1λ−1+⋯+a0λ−n=0→λi(i=1,2,…,n)
1.5.3. 初始值
- 初始状态: 用 y ( − 1 ) , y ( − 2 ) , … , y ( − n ) y(-1), y(-2), \dots, y(-n) y(−1),y(−2),…,y(−n) 描述 n阶系统的初始状态。
1.5.4. 响应
y ( − l ) = y z i ( − l ) + y z s ( − l ) y(-l) = y_{zi}(-l) + y_{zs}(-l) y(−l)=yzi(−l)+yzs(−l)
-
零输入响应: y z i ( k ) y_{zi}(k) yzi(k) (zero input)
- 离散系统的激励为零,仅由系统的初始状态引起的响应
y z i ( k ) + α n − 1 y z i ( k − 1 ) + ⋯ + α 0 y z i ( k − n ) = 0 y_{zi}(k) +\alpha_{n-1} y_{zi}(k-1) + \dots + \alpha_0 y_{zi}(k-n) = 0 yzi(k)+αn−1yzi(k−1)+⋯+α0yzi(k−n)=0
- 离散系统的激励为零,仅由系统的初始状态引起的响应
-
零状态响应: y z s ( k ) y_{zs}(k) yzs(k) (zero status)
- 系统的初始状态 y z s ( − l ) = 0 , l = 1 , 2 , … , n y_{zs}(-l) = 0, \, l = 1,2, \dots, n yzs(−l)=0,l=1,2,…,n为零,仅由激励 f ( k ) f(k) f(k) 引起的响应
- 初始值:由迭代法求出 y z s ( j ) , j = 0 , 1 , … , n − 1 y_{zs}(j),\, j = 0,1,\dots,n-1 yzs(j),j=0,1,…,n−1
-
响应分类:
- 固有响应:系统固有频率 或叫自由响应
- 强迫响应:与激励函数有关
- 暂态响应:随时间增长而消失
- 稳态响应:通常为阶跃函数和周期
1.5.5. Python 求解离散系统的零状态响应
- 输入信号 f ( k ) = s ( k ) + d ( k ) f(k) = s(k) + d(k) f(k)=s(k)+d(k), 其中 s ( k ) = ( 2 k ) 0. 9 k , d ( k ) s(k)= (2k)0.9^k, \, d(k) s(k)=(2k)0.9k,d(k) 是随机噪声信号。求以下系统的零状态响应(均值滤波结果),取 M = 5 M=5 M=5。
y ( k ) = 1 M ∑ n = 0 M − 1 f ( k − n ) y(k) = \displaystyle \frac{1}{M}\sum^{M-1}_{n=0}f(k-n) y(k)=M1n=0∑M−1f(k−n)
# sg is scipy.signal
d = np.random.rand(1,51)-0.5 # random.rand 出来的是 0到1 的随机数
k = np.array([k for k in range(0,51)])
s = 2*k*np.power(0.9,k)
f = s+d[0]
plt.subplot(211)
plt.stem(k,f,'-',use_line_collection=True)
plt.grid(True)
M = 5
a = 1
b = np.ones(5)/5
plt.subplot(212)
y = sg.filtfilt(b,a,f) # digital filter forward and backward to a signal
plt.stem(k,y,':',use_line_collection=True)
plt.grid(True)
plt.xlabel('time index k')
plt.show()

1.5.6. 单位脉冲序列
- 单位脉冲序列 (单位样值序列/单位取样序列)
δ ( k ) = { 1 k = 0 0 k ≠ 0 \begin{aligned}\delta(k) = \begin{cases} 1 & k = 0 \\ 0 & k \neq 0\end{cases}\end{aligned} δ(k)={10k=0k=0- 位移:
δ ( k − k 0 ) = { 1 k = k 0 0 k ≠ k 0 \begin{aligned}\delta(k-k_0) = \begin{cases} 1 & k = k_0 \\ 0 & k \neq k_0\end{cases}\end{aligned} δ(k−k0)={10k=k0k=k0 - 加: δ ( k ) + 2 δ ( k ) = 3 δ ( k ) \delta(k) + 2\delta(k) = 3\delta(k) δ(k)+2δ(k)=3δ(k)
- 乘: δ ( k ) ⋅ δ ( k ) = δ ( k ) \delta(k) \cdot \delta(k) = \delta(k) δ(k)⋅δ(k)=δ(k)
- 延时: δ ( k − 1 ) ⋅ δ ( k − 2 ) = 0 \delta(k-1) \cdot \delta(k-2) = 0 δ(k−1)⋅δ(k−2)=0
- 迭分:
∑ i = − ∞ k δ ( i ) = { 0 , k < 0 1 , k ≥ 0 = ε ( k ) \begin{aligned}\displaystyle \sum^{k}_{i=-\infty} \delta(i) & = \begin{cases} 0, & k<0 \\ 1, & k\geq0 \end{cases} \\ & = \varepsilon(k)\end{aligned} i=−∞∑kδ(i)={0,1,k<0k≥0=ε(k) - 取样性质:
- f ( k ) δ ( k ) = f ( 0 ) δ ( k ) f(k)\delta(k) = f(0) \delta(k) f(k)δ(k)=f(0)δ(k)
- f ( k ) δ ( k − k 0 ) = f ( k 0 ) δ ( k − k 0 ) f(k)\delta(k-k_0) = f(k_0)\delta(k-k_0) f(k)δ(k−k0)=f(k0)δ(k−k0)
- ∑ k = − ∞ ∞ δ ( k ) = 1 \displaystyle \sum_{k=-\infty}^{\infty} \delta(k) = 1 k=−∞∑∞δ(k)=1
- ∑ k = − ∞ ∞ f ( k ) δ ( k ) = f ( 0 ) \displaystyle \sum_{k=-\infty}^{\infty} f(k) \delta(k) = f(0) k=−∞∑∞f(k)δ(k)=f(0)
- ∑ k = − ∞ ∞ f ( k ) δ ( k − k 0 ) = f ( k 0 ) \displaystyle \sum_{k=-\infty}^{\infty} f(k) \delta(k-k_0) = f(k_0) k=−∞∑∞f(k)δ(k−k0)=f(k0)
- 偶函数: δ ( k ) = δ ( − k ) \delta(k) = \delta(-k) δ(k)=δ(−k)
- 位移:
1.5.7. 单位阶跃序列
- 单位阶跃序列
ε ( k ) = { 0 k < 0 1 k ≥ 0 \begin{aligned}\varepsilon(k) = \begin{cases} 0 & k < 0 \\ 1 & k \geq 0\end{cases}\end{aligned} ε(k)={01k<0k≥0- 位移:
ε ( k − k 0 ) = { 0 k < k 0 1 k ≥ k 0 \begin{aligned}\varepsilon(k-k_0) = \begin{cases} 0 & k < k_0 \\ 1 & k \geq k_0\end{cases}\end{aligned} ε(k−k0)={01k<k0k≥k0 - 加: ε ( k ) + 2 ε ( k ) = 3 ε ( k ) \varepsilon(k) + 2\varepsilon(k) = 3\varepsilon(k) ε(k)+2ε(k)=3ε(k)
- 乘: ε ( k ) ⋅ ε ( k ) = ε ( k ) \varepsilon(k) \cdot \varepsilon(k) = \varepsilon(k) ε(k)⋅ε(k)=ε(k)
- 延时: ε ( k − 1 ) ⋅ ε ( k − 5 ) = ε ( k − 5 ) \varepsilon(k-1) \cdot \varepsilon(k-5) = \varepsilon(k-5) ε(k−1)⋅ε(k−5)=ε(k−5)
- 迭分:
∑ i = − ∞ k ε ( i ) = { 0 , k < 0 k + 1 , k ≥ 0 = ( k + 1 ) ε ( k ) \begin{aligned}\displaystyle \sum^{k}_{i=-\infty} \varepsilon(i) & = \begin{cases} 0, & k<0 \\ k+1, & k\geq0 \end{cases} \\ & = (k+1)\varepsilon(k)\end{aligned} i=−∞∑kε(i)={0,k+1,k<0k≥0=(k+1)ε(k) - 与 δ ( k ) \delta(k) δ(k) 的关系:
δ ( k ) = ε ( k ) − ε ( k − 1 ) ε ( k ) = ∑ i = − ∞ k δ ( i ) \begin{aligned} \delta(k) & = \varepsilon(k) - \varepsilon(k-1) \\ \varepsilon(k) & = \displaystyle \sum_{i=-\infty}^{k}\delta(i) \end{aligned} δ(k)ε(k)=ε(k)−ε(k−1)=i=−∞∑kδ(i)
- 位移:
1.5.8. 单位脉冲响应
- 由单位脉冲序列 δ ( k ) \delta(k) δ(k) 所引起的零状态响应,记为 h ( k ) h(k) h(k) 。
- 隐含条件:
f ( k ) = δ ( k ) f(k) = \delta(k) f(k)=δ(k)
对二阶系统 h ( − 1 ) = h ( − 2 ) = 0 h(-1) = h(-2) = 0 h(−1)=h(−2)=0
- 隐含条件:
1.5.9. 单位阶跃响应
-
由单位阶跃序列 ε ( k ) \varepsilon(k) ε(k) 所引起的零状态响应,记为 g ( k ) g(k) g(k)
- 隐含条件:
f ( k ) = ε ( k ) f(k) = \varepsilon(k) f(k)=ε(k)
对二阶系统 g ( − 1 ) = g ( − 2 ) = 0 g(-1)=g(-2)=0 g(−1)=g(−2)=0
- 隐含条件:
-
关联:
g ( t ) = ∑ i = − ∞ k h ( i ) g(t) = \displaystyle \sum^{k}_{i=-\infty} h(i) g(t)=i=−∞∑kh(i)
h ( t ) = ∇ g ( k ) = g ( k ) − g ( k − 1 ) h(t) = \nabla g(k) = g(k) - g(k-1) h(t)=∇g(k)=g(k)−g(k−1)
1.5.10. Python 求解单位脉冲响应
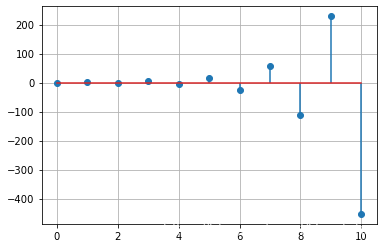
- 求以下离散系统的单位脉冲响应:
y ( k ) + 3 y ( k − 1 ) + 2 y ( k − 2 ) = f ( k ) y(k) + 3y(k-1) +2y(k-2) = f(k) y(k)+3y(k−1)+2y(k−2)=f(k)
# sg is scipy.signal
k = np.array([k for k in range(11)])
a = [1., 3., 2.]
b = [1.]
h = sg.lfilter(b,a,k) # IIR or FIR filter
plt.stem(k,h,'-', use_line_collection = True)
plt.grid(True)
plt.show()
1.5.11. 卷积和
-
由 ∑ i = − ∞ ∞ f ( i ) δ ( k − i ) ⟶ ∑ i = − ∞ ∞ f ( i ) h ( k − i ) \displaystyle\sum_{i=-\infty}^{\infty} f(i)\delta(k-i) \longrightarrow \sum_{i=-\infty}^{\infty} f(i)h(k-i) i=−∞∑∞f(i)δ(k−i)⟶i=−∞∑∞f(i)h(k−i)
可得 f ( k ) → LTI 零状态 → y z s ( k ) f(k) \to \text{LTI 零状态} \to y_{zs}(k) f(k)→LTI 零状态→yzs(k)- 卷积和 y z s ( k ) = ∑ i = − ∞ ∞ f ( i ) h ( k − i ) y_{zs}(k)= \displaystyle\sum_{i = -\infty}^{\infty} f(i)h(k-i) yzs(k)=i=−∞∑∞f(i)h(k−i)
-
定义:
- f 1 f_1 f1 与 f 2 f_2 f2 在区间 ( − ∞ , ∞ ) (-\infty,\infty) (−∞,∞) 的 卷积: f ( k ) = ∑ i = − ∞ ∞ f 1 ( i ) f 2 ( k − i ) f(k) = \displaystyle\sum_{i=-\infty}^{\infty} f_1(i)f_2(k-i) f(k)=i=−∞∑∞f1(i)f2(k−i)
- 记为 f ( k ) = f 1 ( k ) ⋆ f 2 ( k ) f(k) = f_1(k) \star f_2(k) f(k)=f1(k)⋆f2(k)
- y z s ( k ) = ∑ i = − ∞ ∞ f ( i ) h ( k − i ) = f ( k ) ⋆ h ( k ) y_{zs}(k)= \displaystyle\sum_{i = -\infty}^{\infty} f(i)h(k-i)= f(k)\star h(k) yzs(k)=i=−∞∑∞f(i)h(k−i)=f(k)⋆h(k)
- 若 f 1 ( k ) f_1(k) f1(k) 是因果序列 ( f 1 ( k ) = 0 , k < 0 f_1(k)=0,\, k<0 f1(k)=0,k<0), 则: f ( k ) = ∑ i = 0 ∞ f 1 ( i ) f 2 ( k − i ) f(k) = \displaystyle\sum_{i=0}^{\infty} f_1(i)f_2(k-i) f(k)=i=0∑∞f1(i)f2(k−i)
- 若 f 2 ( k ) f_2(k) f2(k) 是因果序列 ( f 2 ( k ) = 0 , k < 0 f_2(k)=0,\, k<0 f2(k)=0,k<0), 则: f ( k ) = ∑ i = − ∞ k f 1 ( i ) f 2 ( k − i ) f(k) = \displaystyle\sum_{i=-\infty}^{k} f_1(i)f_2(k-i) f(k)=i=−∞∑kf1(i)f2(k−i)
- 若 f 1 ( k ) , f 2 ( k ) f_1(k), \, f_2(k) f1(k),f2(k) 均是因果序列 ( f 1 ( k ) = f 2 ( k ) = 0 , k < 0 f_1(k)=f_2(k)=0,\, k<0 f1(k)=f2(k)=0,k<0), 则: f ( k ) = [ ∑ i = 0 k f 1 ( i ) f 2 ( k − i ) ] ε ( k ) f(k) = \displaystyle[\sum_{i=0}^{k} f_1(i)f_2(k-i)]\varepsilon(k) f(k)=[i=0∑kf1(i)f2(k−i)]ε(k)
-
代数性质:
- 三定律:
- 交换律: f 1 ⋆ f 2 = f 2 ⋆ f 1 f_1 \star f_2 = f_2 \star f_1 f1⋆f2=f2⋆f1
- 分配律: f 1 ⋆ [ f 2 + f 3 ] = f 1 ⋆ f 2 + f 1 ⋆ f 3 f_1 \star [f_2 + f_3] = f_1\star f_2 + f_1 \star f_3 f1⋆[f2+f3]=f1⋆f2+f1⋆f3
- 结合律: [ f 1 ⋆ f 2 ] ⋆ f 3 = f 1 ⋆ [ f 2 ⋆ f 3 ] [f_1\star f_2]\star f_3 = f_1\star [f_2 \star f_3] [f1⋆f2]⋆f3=f1⋆[f2⋆f3]
- 三定律:
-
特性:
- f ( k ) ⋆ δ ( k − k 0 ) = δ ( k − k 0 ) ⋆ f ( k ) = f ( k − k 0 ) f(k)\star\delta(k-k_0) = \delta(k-k_0) \star f(k) = f(k-k_0) f(k)⋆δ(k−k0)=δ(k−k0)⋆f(k)=f(k−k0)
- δ ( k ) ⋆ δ ( k ) = δ ( k ) \delta(k) \star \delta(k) = \delta(k) δ(k)⋆δ(k)=δ(k)
- f ( k ) ⋆ ε ( k ) = ∑ − ∞ k f ( i ) f(k) \star \varepsilon(k) = \displaystyle\sum_{-\infty}^{k} f(i) f(k)⋆ε(k)=−∞∑kf(i)
- ε ( k ) ⋆ ε ( k ) = ( k + 1 ) ⋅ ε ( k ) \varepsilon(k) \star \varepsilon(k) = (k+1) \cdot \varepsilon(k) ε(k)⋆ε(k)=(k+1)⋅ε(k)
- ∇ [ f 1 ( k ) ⋆ f 2 ( k ) ] = ∇ f 1 ( k ) ⋆ f 2 ( k ) = f 1 ( k ) ⋆ ∇ f 2 ( k ) \nabla[f_1(k) \star f_2(k)] = \nabla f_1(k) \star f_2(k) = f_1(k) \star \nabla f_2(k) ∇[f1(k)⋆f2(k)]=∇f1(k)⋆f2(k)=f1(k)⋆∇f2(k)
- 衍生:
f ( k ) = f 1 ( k ) ⋆ f 2 ( k ) f ( k − k 1 − k 2 ) = f 1 ( k − k 1 ) ⋆ f 2 ( k − k 2 ) = f 1 ( k − k 1 − k 2 ) ⋆ f 2 ( k ) = f 1 ⋆ f 2 ( k − k 1 − k 2 ) \begin{aligned}f(k) &= f_1(k)\star f_2(k) \\ f(k-k_1-k_2) & = f_1(k-k_1)\star f_2(k-k_2) \\ &= f_1(k-k_1-k_2)\star f_2(k) \\ & = f_1 \star f_2(k-k_1-k_2)\end{aligned} f(k)f(k−k1−k2)=f1(k)⋆f2(k)=f1(k−k1)⋆f2(k−k2)=f1(k−k1−k2)⋆f2(k)=f1⋆f2(k−k1−k2)
1.5.12. Python 求卷积和
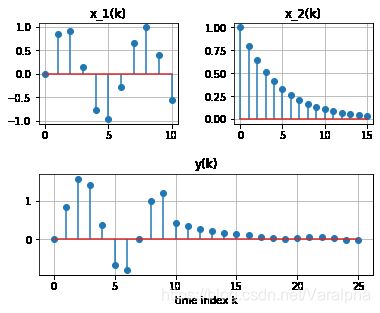
- 求以下两个离散序列的卷积:
x 1 ( k ) = sin ( k ) , 0 ≤ k ≤ 10 x 2 ( k ) = 0. 8 k , 0 ≤ k ≤ 15 x_1(k) = \sin(k),\, 0\leq k \leq 10 \hspace{3em} x_2(k) = 0.8^k,\, 0\leq k\leq 15 x1(k)=sin(k),0≤k≤10x2(k)=0.8k,0≤k≤15
# sg is scipy.signal
k1 = np.linspace(0,10,11)
x1 = np.sin(k1)
plt.subplot(221)
plt.stem(k1,x1,'-',use_line_collection=True)
plt.grid(True)
plt.title('x_1(k)=sin(k)')
k2 = np.linspace(0,15,16)
x2 = np.power(0.8,k2)
plt.subplot(222)
plt.stem(k2,x2,'-',use_line_collection=True)
plt.grid(True)
plt.title('x_2(k) = 0.8^k')
plt.subplot(212)
y = sg.convolve(x1, x2,'full') # 使用 scipy.signal 的卷积函数 convolve
k3 = np.linspace(0, 25,26)
plt.stem(k3,y,'-',use_line_collection=True)
plt.grid(True)
plt.title('y(k)')
plt.xlabel('time index k')
plt.subplots_adjust(top=1, wspace=0.4, hspace=0.5) # 调整视图
plt.show()
1.5.13. 差分算子 E
E − 1 → 延迟算子 E → 超前算子 E − 1 f ( k ) = f ( k − 1 ) E f ( k ) = f ( k + 1 ) E − 2 f ( k ) = f ( k − 2 ) E 2 f ( k ) = f ( k + 2 ) E − n f ( k ) = f ( k − n ) E n f ( k ) = f ( k + n ) \begin{aligned} E^{-1} & \to \text{延迟算子} \hspace{3em} & E & \to \text{超前算子} \\ E^{-1}f(k) & = f(k-1) & Ef(k) & = f(k+1) \\ E^{-2}f(k) & = f(k-2) & E^{2}f(k) & = f(k+2) \\ E^{-n}f(k) & = f(k-n) & E^{n}f(k) & = f(k+n)\end{aligned} E−1E−1f(k)E−2f(k)E−nf(k)→延迟算子=f(k−1)=f(k−2)=f(k−n)EEf(k)E2f(k)Enf(k)→超前算子=f(k+1)=f(k+2)=f(k+n)
-
性质:
- E E E 的 正幂 多项式可以因式分解 也可以相乘
- 设 A ( E ) , B ( E ) A(E), B(E) A(E),B(E) 为 E E E 的正幂或负幂多项式,则 A ( E ) B ( E ) = B ( E ) A ( E ) A(E)B(E) = B(E)A(E) A(E)B(E)=B(E)A(E)
- 差分算子方程公因子 不能随意 消去
- 设 A ( E ) , B ( E ) , D ( E ) A(E), B(E), D(E) A(E),B(E),D(E) 为 E E E 的正幂多项式,
有 D ( E ) ⋅ [ A ( E ) D ( E ) ⋅ B ( E ) ] f ( t ) = A ( E ) B ( E ) f ( t ) \displaystyle D(E) \cdot [\frac{A(E)}{D(E)\cdot B(E)}]f(t) = \frac{A(E)}{B(E)}f(t) D(E)⋅[D(E)⋅B(E)A(E)]f(t)=B(E)A(E)f(t)
但 A ( E ) D ( E ) ⋅ B ( E ) [ D ( E ) f ( t ) ] ≠ A ( E ) B ( E ) f ( t ) \displaystyle\frac{A(E)}{D(E)\cdot B(E)}[D(E)f(t)] \neq \frac{A(E)}{B(E)}f(t) D(E)⋅B(E)A(E)[D(E)f(t)]=B(E)A(E)f(t)
-
传输算子:
H ( E ) = B ( E ) A ( E ) = b m E m + b m − 1 E m − 1 + ⋯ + b 0 E n + a n − 1 E n − 1 + ⋯ + a 0 H(E) = \displaystyle \frac{B(E)}{A(E)} = \frac{b_m E^m+ b_{m-1} E^{m-1} + \dots + b_0}{E^n + a_{n-1}E^{n-1} + \dots + a_0} H(E)=A(E)B(E)=En+an−1En−1+⋯+a0bmEm+bm−1Em−1+⋯+b0
To TOP 至目录