IO线程同步互斥条件变量-10.27
线程优缺点:
优点:线程间很容易进行通信,通过全局变量实现数据共享和交换
缺点:多个线程同时访问共享对象时需要引入同步和互斥机制
线程间通信借助全局变量
同步和互斥机制
信号量:pv操作
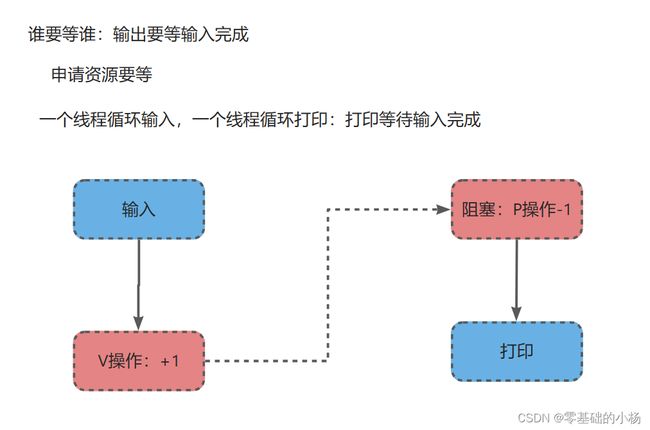
p:申请资源 资源量-1
v:释放资源 资源量 +1
sem_t sem;//定义一个资源量
sem_init(&sem,0,资源量)//初始化信号量(资源)-资源量
sem_wait (&sem)//获取资源量,阻塞等待
sem_post(&sem)//释放资源量
互斥锁:互斥
pthread_mutex_t mutex;//定义一把锁
pthread_mutex_init(&mutex,NULL)//初始化互斥锁
pthread_mutex_lock(&mutex)//上锁
pthread_mutex_unlock(&mutex)//解锁
pthread_mutex_destroy(&mutex)//销毁锁
条件变量:结合互斥锁
pthread_cond_init(&cond,NULL);
pthread_cond_wait(&cond,&mutex);//解锁,阻塞,满足条件解锁阻塞并上锁
pthread_cond_signal(&cond);//唤醒一个阻塞在pthread_cond_wait的线程
pthread_cond_broadcast(&cond);//唤醒所有阻塞在pthread_cond_wait的线程
pthread_cond_destroy(&cond);//销毁条件变量
一、同步概念
同步(synchronization)指的是多个任务(线程)按照约定的顺序相互配合完成一件事情
二、同步机制:
1、信号量实现
1)信号量代表某一类资源,其值表示系统中该资源的数量
2)信号量是一个dd受保护的变量,只能通过三种操作来访问
初始化 sem_init
P操作(申请资源) sem_wait
V操作(释放资源) sem_post
3)信号量的值为非负整数 (>=0)
P(S) 含义如下:
if(信号量的值大于0)
{
申请资源的任务继续运行;
信号量的值减一;
}
else
{
申请资源的任务阻塞;
}
V(S) 含义如下:
if(没有任务在等待该资源)
{
信号量的值加一;
}
else
{
唤醒第一个等待的任务,让其继续运行
}
2、通过信号量实现线程间同步。
信号量:通过信号量实现同步操作;由信号量来决定线程是继续运行还是阻塞等待
信号量代表某一类资源,其值表示系统中该资源的数量,信号量值>0,表示有资源可以用,可以申请到资源,继续执行程序,信号量值<=0,表示没有资源可以用,无法申请到资源,阻塞。
信号量是一个受保护的变量,只能通过三种操作来访问:初始化sem_init、P操作(申请资源)sem_wait、V操作(释放资源)sem_post
谁要等待谁去完成:
3、相关函数:
1)初始化信号量 sem_init
#include 2)申请资源 sem_wait
#include 3)释放资源 sem_post
#include #include 二、互斥
1.概念:
引入互斥(mutual exclusion)锁的目的是用来保证共享数据操作的完整性。互斥锁主要用来保护临界资源每个临界资源都由一个互斥锁来保护,某一资源同时只允许一个线程对其进行访问。线程必须先获得互斥锁才能访问临界资源,访问完资源后释放该锁。如果无法获得锁,线程会阻塞直到获得锁为止
- 相关函数:
1)初始化互斥锁pthread_mutex_init
#include 2)销毁互斥锁pthread_mutex_destroy
#include 3)申请互斥锁(上锁)pthread_mutex_lock
#include 4)释放互斥锁pthread_mutex_unlock
#include 三、补充:死锁(了解)
1、什么是死锁?
死锁是指多个进程因竞争资源而造成的一种僵局(互相等待),若无外力作用,这些进程都将无法向前推进。
例如,在某一个计算机系统中只有一台打印机和一台输入 设备,进程P1正占用输入设备,同时又提出使用打 印机的请求,但此时打印机正被进程P2 所占用,而P2在未释放打印机之前,又提出请求使用正被P1占用着输入设备。这样两个进程相互无休止地等待下去,均无法继续执行,此时两个进程陷入死锁状态。
2、产生原因:
1. 系统资源的竞争
系统资源的竞争导致系统资源不足,以及资源分配不当,导致死锁。
2. 进程运行推进顺序不合适
进程在运行过程中,请求和释放资源的顺序不当,会导致死锁。
3、死锁产生的四个条件:
1.互斥条件:一个资源每次只能被一个进程使用,即在一段时间内某 资源仅为一个进程所占有。此时若有其他进程请求该资源,则请求进程只能等待。
2.请求与保持条件:进程已经保持了至少一个资源,但又提出了新的资源请求,而该资源已被其他进程占有,此时请求进程被阻塞,但对自己已获得的资源保持不放。
3.不可剥夺条件:进程所获得的资源在未使用完毕之前,不能被其他进程强行夺走,即只能 由获得该资源的进程自己来释放(只能是主动释放)。
4.循环等待条件: 若干进程间形成首尾相接循环等待资源的关系
4、如何避免死锁
我们可以通过破坏死锁产生的4个必要条件来 预防死锁,由于资源互斥是资源使用的固有特性是无法改变的。
1.破坏“不可剥夺”条件:一个进程不能获得所需要的全部资源时便处于等待状态,等待期间他占有的资源将被隐式的释放重新加入到 系统的资源列表中,可以被其他的进程使用,而等待的进程只有重新获得自己原有的资源以及新申请的资源才可以重新启动,执行。
2.破坏”请求与保持条件“:第一种方法静态分配即每个进程在开始执行时就申请他所需要的全部资源。第二种是动态分配即每个进程在申请所需要的资源时他本身不占用系统资源。
3.破坏“循环等待”条件:采用资源有序分配其基本思想是将系统中的所有资源顺序编号,将紧缺的,稀少的采用较大的编号,在申请资源时必须按照编号的顺序进行,一个进程只有获得较小编号的进程才能申是指两个或两个以上的进程在执行过程中,由于竞争资源或者由于彼此通信而造成的一种阻塞的现象,若无外力作用,它们都将无法推进下去
死锁产生的四个必要条件:
1、互斥使用,即当资源被一个线程使用(占有)时,别的线程不能使用
2、不可抢占,资源请求者不能强制从资源占有者手中夺取资源,资源只能由资源占有者主动释放。
3、请求和保持,即当资源请求者在请求其他的资源的同时保持对原有资源的占有。
4、循环等待,即存在一个等待队列:P1占有P2的资源,P2占有P3的资源,P3占有P1的资源。这样就形成了一个等待环路。
注意:当上述四个条件都成立的时候,便形成死锁。当然,死锁的情况下如果打破上述任何一个条件,便可让死锁消失。
1, 2 ,3
A : 需要1,占有2
B :需要2,占有3
C:需要3,占有1
练习1用两个互斥锁完成两个线程一段字符串的正序倒序输出
#include 练习2:三个线程分别输出A、B、C,将三个线程实现同步,顺序输出ABCABC……

四、条件变量
一般与互斥锁搭配使用,可以实现同步机制
1、步骤
1)pthread_cond_init:初始化
2)pthread_cond_wait:阻塞等待条件产生,没有条件产生时阻塞,同时解锁,当条件产生时结束阻塞,再次上锁
3)pthread_mutex_lock(); //上锁
4)pthread_cond_wait(cond, lock); //如果没有条件产生时,解锁,当等待到条件产生时,上锁
5)pthread_cond_signal:产生条件,不阻塞
6)pthread_cond_wait先执行,pthread_cond_signal再产生条件
生产者与消费者:先有消费者再有生产者
消费者--》需求--》生产者--》生产--》消费者
pthread_cond_wait:消费者
pthread_cond_signal:生产者
2、函数
1)初始化条件变量 pthread_cond_init
#intclude2)无条件等待信号的产生,阻塞等待pthread_cond_wait
#intclude3)唤醒一个阻塞在pthread_cond_wait函数上的线程pthread_cond_signal
#intclude4)销毁条件变量pthread_cond_destroy
int pthread_cond_destroy(pthread_cond_t *cond);
功能:将条件变量销毁
参数:cond:条件变量值(要销毁的条件变量地址)
返回值:成功:0, 失败:非0
5)唤醒全部阻塞在条件变量上的线程pthread_cond_broadcast
int pthread_cond_broadcast(pthread_cond_t *cond);
功能: 唤醒全部阻塞在条件变量上的线程
参数: @cond 条件变量地址
返回值: 成功: 0
失败: errno值
练习:条件变量实现三个线程分别输出A、B、C,将三个线程实现同步,顺序输出ABCABC……
//练习:三个线程分别输出A、B、C,将三个线程实现同步,顺序输出ABCABC……
#include