OFDM同步--符号定时偏差STO
参考书籍:《MIMO-OFDM无线通信技术及MATLAB实现》 实验图基本都截取自该本书
一、什么是STO
OFDM在接收时需要做FFT,需要在OFDM符号周期内获得对发射信号的精确采样,即在去CP之后我们需要找到OFDM的起始位,这样进行FFT运算时才能实现每一个符号位的对齐。时域 δ \delta δ的STO同时会导致频域 2 π k δ / N 2\pi k\delta/N 2πkδ/N的相位偏移。

二、STO的影响
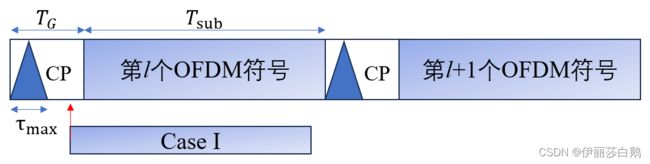
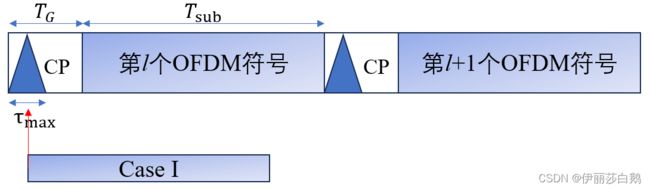
STO对符号采样的影响存在4种情况,假设多径延时拓展为 τ m a x \tau_{max} τmax
Case I
估计的 OFDM 符号起始点与精确的定时一致,因此能够保持子载波频率分量之间的正交性。在这种情况下,可以完美地恢复 OFDM符号,而且没有任何干扰。

Case II
估计的OFDM符号起始点在精确的定时点之前,但处在前一个OFDM符号信道响应的末端之后。在这种情况下,第I个符号与第I-1个符号不会重叠,即不存在由前一个符号引起的ISI。
Case II 情况下子载波分量保持正交性但是恢复结果会出现固定相位偏移(对应星座图出现旋转,但并不散乱),可以使用相位补偿器解决该问题。

Case III
估计的OFDM符号起始点早于前一个OFDM 符号信道响应的末端,因此符号定时太早而无法避免ISI。这种情况下,子载波之间的正交性被(来自前一个符号的)ISI破坏,同时出现了ICI。
相位偏差严重,无法通过补偿进行矫正

Case IV
估计的OFDM符号起始点滞后于精确的定时点。在这种情况下,在 FFT 间隔内,信号由当前的OFDM符号的一部分和下一个OFDM符号的一部分组成。

相位偏差严重,无法通过补偿进行矫正。

三、STO估计技术
Case III 和 Case IV 已经无法仅使用补偿技术进行矫正了,因此需要估计出STO,使得接收机可以准确估计出OFDM符号的起始点。
3.1 时域STO估计
1. 基于CP的STO估计
利用CP与数据的相似性去估计STO,利用间隔N个采样(N=OFDM符号采样长度)滑动窗口寻找接收数据最相似的情况,并将其定为OFDM的起始采样点。移动时不断变化的采样点时间,即 δ \delta δ 便为STO的时域延时。
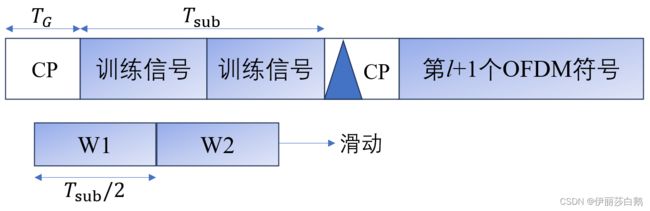
图为双滑动窗口的STO估计技术:

当 W1 和 W 2中两个采样块之间相似度达到最大,估计出 δ \delta δ 即可确定OFDM采样起始点。
W1与W2相似度计算方法
- 差值估计
直接计算搜索块的差值,尽管这种技术简单,但是当接收系统中存在 CFO 时其性能会下降。
δ ^ = arg min δ { ∑ i = δ N G − 1 + δ ∣ y l [ n + i ] − y l [ n + N + i ] ∣ } \hat{\delta}=\underset{\delta}{\arg \min }\left\{\sum_{i=\delta}^{N_{\mathrm{G}-1+\delta}}\left|y_l[n+i]-y_l[n+N+i]\right|\right\} δ^=δargmin{i=δ∑NG−1+δ∣yl[n+i]−yl[n+N+i]∣} - 平方估计
为了处理CFO, 通过最小化 W1 中采样块和 W2中采样块之差的平方来估计STO
δ ^ = arg min δ { ∑ i = δ N G − 1 + δ ( ∣ y l [ n + i ] ∣ − ∣ y l ∗ [ n + N + i ] ) 2 } \hat{\delta}=\underset{\delta}{\arg \min }\left\{\sum_{i=\delta}^{N_{\mathrm{G}}-1+\delta}\left(\left|y_l[n+i]\right|-\mid y_l^*[n+N+i]\right)^2\right\} δ^=δargmin{i=δ∑NG−1+δ(∣yl[n+i]∣−∣yl∗[n+N+i])2} - 相关性估计
W1 和 W2 中两个采样块之间的相关性,即
δ ^ = arg max δ { ∑ i = δ N G − 1 + δ ∣ y l [ n + i ] y l ∗ [ n + N + i ] ∣ } \hat{\delta}=\underset{\delta}{\arg \max }\left\{\sum_{i=\delta}^{N_{\mathrm{G}}-1+\delta}\left|y_l[n+i] y_l{ }^*[n+N+i]\right|\right\} δ^=δargmax{i=δ∑NG−1+δ∣yl[n+i]yl∗[n+N+i]∣} - 最大似然估计
最大化 W1 中采样块和 W2 中采样块之间的相关性。然而,当接收信号中存在 CFO 时的性能会下降。为了处理接收信号中的 CFO,通过最大化对数似然函数来估计STO。
δ ^ M L = arg max δ [ ∑ i = δ N G − 1 + δ 2 ( 1 − ρ ) Re { y l [ n + i ] y l ∗ [ n + N + i ] } − ρ ∑ i = δ N G − 1 + δ ∣ y l [ n + i ] − y l [ n + N + i ] ∣ ] \hat{\delta}_{\mathrm{ML}}=\underset{\delta}{\arg \max }\left[\sum_{i=\delta}^{N_{\mathrm{G}-1+\delta}} 2(1-\rho) \operatorname{Re}\left\{y_l[n+i] y_l^*[n+N+i]\right\}-\rho \sum_{i=\delta}^{N_{\mathrm{G}}-1+\delta}\left|y_l[n+i]-y_l[n+N+i]\right|\right] δ^ML=δargmax[i=δ∑NG−1+δ2(1−ρ)Re{yl[n+i]yl∗[n+N+i]}−ρi=δ∑NG−1+δ∣yl[n+i]−yl[n+N+i]∣]
2. 基于训练符号的STO技术
通过发射训练符号,可以在接收机实现符号同步。与基于 CP 的方法相比,基于训练符号的方法存在因传输训练符号而带来的负荷问题,但是这种方法不受多径信道的影响 (我其实不太理解为什么不受多径信道影响,这也是书中提到的方法就放在这) 。在估计的过程中,可以使用两个相同的OFDM训练符号,也可以使用具有 (不同重复周期)重复结构的单个OFDM训练符号。
3.2 频域STO估计
接收信号会因 STO 而产生相位旋转。相位旋转与子载波的频率成比例, 所以可以用频域接收信号中相邻子载波的相位差来估计 STO。频域 STO 估计技术通常会得到相当精确的估计值,所以能够用于精符号同步中,但是同样以为着更大的计算量。
3.2.1 训练符号
一种利用相位旋转的影响进行 STO 估计的技术 。更具体地, 将训练符号的共轭 X l ∗ [ k ] X_l^*[k] Xl∗[k] 和存在 STO 的接收符号相乘,然后从中估计出 STO
δ ^ = arg max n ( y l X [ n ] ) \hat{\delta}=\underset{n}{\arg \max }\left(y_l^{\mathrm{X}}[n]\right) δ^=nargmax(ylX[n])其中 y l X [ n ] = IFFT { Y l [ k ] e j 2 π n k / N X l ∗ [ k ] } = 1 N ∑ k = 0 N − 1 Y l [ k ] e j 2 π δ k / N X l ∗ [ k ] e j 2 π δ k / N = 1 N ∑ k = 0 N − 1 H l [ k ] X l [ k ] X l ∗ [ k ] e j 2 π ( δ + n ) k / N = 1 N ∑ k = 0 N − 1 H l [ k ] e j 2 π ( δ + n ) k / N = h l [ n + δ ] \begin{aligned} y_l^{\mathrm{X}}[n] & =\operatorname{IFFT}\left\{Y_l[k] \mathrm{e}^{\mathrm{j} 2 \pi n k / N} X_l^*[k]\right\} \\ & =\frac{1}{N} \sum_{k=0}^{N-1} Y_l[k] \mathrm{e}^{\mathrm{j} 2 \pi \delta k / N} X_l^*[k] \mathrm{e}^{\mathrm{j} 2 \pi \delta k / N} \\ & =\frac{1}{N} \sum_{k=0}^{N-1} H_l[k] X_l[k] X_l^*[k] \mathrm{e}^{\mathrm{j} 2 \pi(\delta+n) k / N} \\ & =\frac{1}{N} \sum_{k=0}^{N-1} H_l[k] \mathrm{e}^{\mathrm{j} 2 \pi(\delta+n) k / N} \\ & =h_l[n+\delta] \end{aligned} ylX[n]=IFFT{Yl[k]ej2πnk/NXl∗[k]}=N1k=0∑N−1Yl[k]ej2πδk/NXl∗[k]ej2πδk/N=N1k=0∑N−1Hl[k]Xl[k]Xl∗[k]ej2π(δ+n)k/N=N1k=0∑N−1Hl[k]ej2π(δ+n)k/N=hl[n+δ]假设训练符号 X [ k ] X[k] X[k] 的功率等于 1 , 即 X [ k ] X l ∗ [ k ] = ∣ X [ k ] ∣ 2 = 1 X[k] X_l^*[k]=|X[k]|^2=1 X[k]Xl∗[k]=∣X[k]∣2=1 。
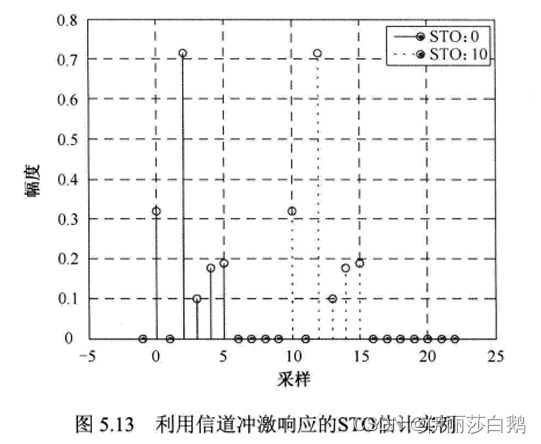
3.2.2 信道脉冲响应
利用信道脉冲响应进行 STO 估计的两个例子,其中一个0点采样,另一个10点采样。第一个信道脉冲响应从第 0个采样开始,用实线表示。第二个信道脉冲响应从第10个采样开始,用虚线表示。可以通过这种方法对 STO 进行正确的估计。
总结
数字信号的同步一直都是数字信号处理中很关键的步骤,但在学习过程中我仅将同步视为必要步骤而不是复杂步骤。其实系统同步技术都很关键和复杂,经过同步的矫正才能保证系统的正确稳定。本文简要介绍了OFDM的STO同步,后续还会介绍OFDM另外一个重要的同步技术—>CFO同步。