【强化学习】12 —— 策略梯度(REINFORCE )
文章目录
- 前言
- 策略梯度
-
- 基于策略的强化学习的优缺点
- Example:Aliased Gridworld
- 策略目标函数
- 策略优化
- 策略梯度
- 利用有限差分计算策略梯度
- 得分函数和似然比
- 策略梯度定理
- 蒙特卡洛策略梯度(Monte-Carlo Policy Gradient)
-
- Puck World Example
- Softmax随机策略
- 代码实践
-
- 结果
- 参考
前言
之前在【强化学习】09——价值和策略近似逼近方法中讨论过使用参数 θ \theta θ来近似价值函数 V V V或状态价值函数 Q Q Q V θ ( s ) ≈ V π ( s ) Q θ ( s , a ) ≈ Q π ( s , a ) \begin{aligned}V_\theta(s)&\approx V^\pi(s)\\Q_\theta(s,a)&\approx Q^\pi(s,a)\end{aligned} Vθ(s)Qθ(s,a)≈Vπ(s)≈Qπ(s,a)之后,再通过价值函数推导出相应的策略(比如利用 ϵ \epsilon ϵ-贪婪策略)。
本节将主要讨论直接参数化策略的方法 π θ ( s , a ) \pi_{\theta}(s,a) πθ(s,a)。策略可以是确定性的—— a = π θ ( s ) a=\pi_{\theta}(s) a=πθ(s),也可以是随机的—— π θ ( s , a ) = P [ a ∣ s , θ ] \pi_\theta(s,a)=\mathbb{P}[a\mid s,\theta] πθ(s,a)=P[a∣s,θ]。通过参数化策略可以将可见的已知状态泛化到未知的状态上。在本节中我们主要讨论的是模型无关的强化学习。
强化学习算法主要可以分为基于价值函数(Value-Based)的、基于策略的(Policy-Based)以及基于Actor-Critic(后文会进行介绍)框架的。

三者区别如下表所示:
| Methods | Value | Policy |
|---|---|---|
| Value Based | 学习到的价值函数 | 隐式的策略,如 ϵ \epsilon ϵ-贪婪策略 |
| Policy Based | 没有价值函数 | 学习到的策略 |
| Actor-Critic | 学习到的价值函数 | 学习到的策略 |
策略梯度
基于策略的强化学习的优缺点
优点
- 具有更好的收敛性质
- 在高维度或连续的动作空间中更有效
- 这是最重要的因素:基于值函数的方法,通常需要取最大值
- 能够学习出随机策略
缺点
- 通常会收敛到局部最优而非全局最优(基于值函数的方法也可能出现)
- 评估一个策略通常不够高效并具有较大的方差(variance)
Example:Aliased Gridworld
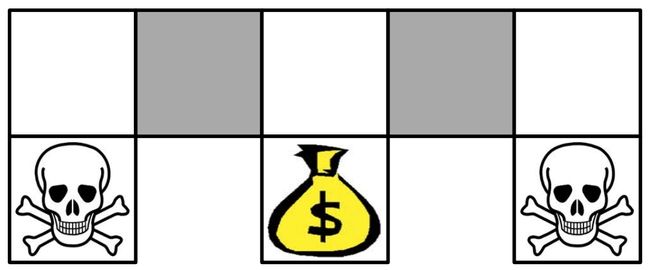
- 智能体无法区分灰色部分的格子
- 移动方向N, E, S, W

对于一个确定性的策略,可能会出现以下情况:
- 在灰色区域同时向W方向移动
- 或在灰色区域同时向E方向移动
因此,就无法抵达终点,获得奖励。基于价值函数的策略是近于确定性的策略(greedy or ϵ \epsilon ϵ-greedy),因此会在上面的区域经过很长的时间才可能获得奖励。
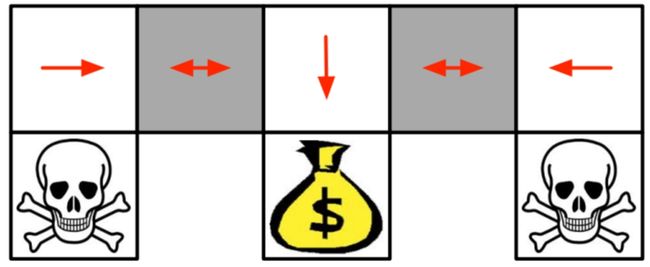
对于随机性的策略,在灰色区域向W或E方向移动的概率五五开。 π θ ( wall to N and S, move E ) = 0.5 π θ ( wall to N and S, move W ) = 0.5 \begin{aligned}\pi_\theta(\text{wall to N and S, move E})&=0.5\\\pi_\theta(\text{wall to N and S, move W})&=0.5\end{aligned} πθ(wall to N and S, move E)πθ(wall to N and S, move W)=0.5=0.5随机性的策略很有可能在几步内达到目标状态。基于策略的方法可以学习到最优的随机性策略。
策略目标函数
目标:给定策略 π θ ( s , a ) \pi_{\theta}(s,a) πθ(s,a),找到最优的 θ \theta θ。以下为几种衡量策略 π θ ( s , a ) \pi_{\theta}(s,a) πθ(s,a)质量的方法:
- 在离散episodic的环境中使用起始价值(start value): J 1 ( θ ) = V π θ ( s 1 ) = E π θ [ v 1 ] J_1(\theta)=V^{\pi_\theta}(s_1)=\mathbb{E}_{\pi_\theta}\left[v_1\right] J1(θ)=Vπθ(s1)=Eπθ[v1]
- 在连续 continuing的环境中使用平均价值(average value): J a v V ( θ ) = ∑ s d π θ ( s ) V π θ ( s ) J_{avV}(\theta)=\sum_sd^{\pi_\theta}(s)V^{\pi_\theta}(s) JavV(θ)=s∑dπθ(s)Vπθ(s)
- 或者是每步的平均奖励average reward per time-step: J a v R ( θ ) = ∑ s d π θ ( s ) ∑ a π θ ( s , a ) R s a J_{avR}(\theta)=\sum_sd^{\pi_\theta}(s)\sum_a\pi_\theta(s,a)R_s^a JavR(θ)=s∑dπθ(s)a∑πθ(s,a)Rsa
- π θ \pi_{\theta} πθ服从 d π θ ( s ) d^{\pi_\theta}(s) dπθ(s)分布
策略优化
基于策略的强化学习本质是一个优化问题,对于目标函数 J ( θ ) J({\theta}) J(θ),找到合适的 θ \theta θ,使得目标函数最大化。
- 未使用梯度的方法
- Hill climbing
- Simplex / amoeba / Nelder Mead
- Genetic algorithms
- 使用梯度的方法
- Gradient descent
- Conjugate gradient
- Quasi-newton
在本节中,主要讨论基于梯度下降的方法。
策略梯度
同样的,对于目标函数 J ( θ ) J({\theta}) J(θ),策略梯度算法需要通过不断提升策略的梯度以找到 J ( θ ) J({\theta}) J(θ)的局部最大值, Δ θ = α ∇ θ J ( θ ) \Delta\theta=\alpha\nabla_\theta J(\theta) Δθ=α∇θJ(θ)。其中 ∇ θ J ( θ ) \nabla_\theta J(\theta) ∇θJ(θ)为策略梯度 ∇ θ J ( θ ) = ( ∂ J ( θ ) ∂ θ 1 ⋮ ∂ J ( θ ) ∂ θ n ) \nabla_\theta J(\theta)=\begin{pmatrix}\frac{\partial J(\theta)}{\partial\theta_1}\\\vdots\\\frac{\partial J(\theta)}{\partial\theta_n}\end{pmatrix} ∇θJ(θ)= ∂θ1∂J(θ)⋮∂θn∂J(θ)
利用有限差分计算策略梯度
- 对于维度 k ∈ [ 1 , n ] k\in[1,n] k∈[1,n]
- 估计滴 k k k维上目标函数 J ( θ ) J({\theta}) J(θ)对 θ \theta θ的偏微分
- 引入偏移量 ϵ u k \epsilon u_k ϵuk,用差分近似微分。其中 u k u_k uk是单位向量,第 k k k个分量中为1,其他分量中为0. ∂ J ( θ ) ∂ θ k ≈ J ( θ + ϵ u k ) − J ( θ ) ϵ \frac{\partial J(\theta)}{\partial\theta_k}\approx\frac{J(\theta+\epsilon u_k)-J(\theta)}\epsilon ∂θk∂J(θ)≈ϵJ(θ+ϵuk)−J(θ)
- 简单、噪声大、效率低,但有时有效
- 适用于任意策略,即使策略不可微分
得分函数和似然比
似然比(Likelihood ratios)利用下列特性 ∇ θ π θ ( s , a ) = π θ ( s , a ) ∇ θ π θ ( s , a ) π θ ( s , a ) = π θ ( s , a ) ∇ θ log π θ ( s , a ) \begin{aligned} \nabla_\theta\pi_\theta(s,a)& =\pi_\theta(s,a)\frac{\nabla_\theta\pi_\theta(s,a)}{\pi_\theta(s,a)} \\ &=\pi_\theta(s,a)\nabla_\theta\log\pi_\theta(s,a) \end{aligned} ∇θπθ(s,a)=πθ(s,a)πθ(s,a)∇θπθ(s,a)=πθ(s,a)∇θlogπθ(s,a)其中, ∇ θ log π θ ( s , a ) \nabla_\theta\log\pi_\theta(s,a) ∇θlogπθ(s,a)是得分函数(score function)
考虑一个简单的单步马尔可夫决策过程
- 起始状态为~()
- 决策过程在进行一步决策后结束,获得奖励值为 r = R s , a r=\mathcal R_{s,a} r=Rs,a
所以策略的价值期望可以写成 J ( θ ) = E π θ [ r ] = ∑ s ∈ S d ( s ) ∑ a ∈ A π θ ( s , a ) R s , a ∇ θ J ( θ ) = ∑ s ∈ S d ( s ) ∑ a ∈ A ∇ θ π θ ( s , a ) = ∑ s ∈ S d ( s ) ∑ a ∈ A π θ ( s , a ) ∇ θ log π θ ( s , a ) R s , a = E π θ [ ∇ θ log π θ ( s , a ) r ] \begin{aligned} J(\theta)& =\mathbb{E}_{\pi_\theta}\left[r\right] \\ &=\sum_{s\in\mathcal{S}}d(s)\sum_{a\in\mathcal{A}}\pi_\theta(s,a)\mathcal{R}_{s,a} \\ \nabla_\theta J(\theta)&=\sum_{s\in\mathcal{S}}d(s)\sum_{a\in\mathcal{A}}\nabla_\theta\pi_\theta(s,a)\\& =\sum_{s\in\mathcal{S}}d(s)\sum_{a\in\mathcal{A}}\color{red}\pi_\theta(s,a)\nabla_\theta\log\pi_\theta(s,a)\mathcal{R}_{s,a} \\ &=\mathbb{E}_{\pi_\theta}\left[\nabla_\theta\log\pi_\theta(s,a)r\right] \end{aligned} J(θ)∇θJ(θ)=Eπθ[r]=s∈S∑d(s)a∈A∑πθ(s,a)Rs,a=s∈S∑d(s)a∈A∑∇θπθ(s,a)=s∈S∑d(s)a∈A∑πθ(s,a)∇θlogπθ(s,a)Rs,a=Eπθ[∇θlogπθ(s,a)r]
这一结果可以通过从 d ( s ) d(s) d(s)中采样状态 s s s和从 π θ π_θ πθ中采样动作来近似估计
策略梯度定理
策略梯度定理把似然比的推导过程泛化到多步马尔可夫决策过程.用长期的价值函数 Q π θ ( s , a ) Q^{\pi_\theta}(s,a) Qπθ(s,a)代替前面的瞬时奖励 r = R s , a r=\mathcal R_{s,a} r=Rs,a。策略梯度定理涉及起始状态目标函数 J 1 J_1 J1,平均奖励目标函数 J a v R J_{avR} JavR ,和平均价值目标函数 J a v V J_{avV} JavV.
定理
对任意可微的策略 π θ ( s , a ) \pi_{\theta}(s,a) πθ(s,a),任意策略的目标函数 J 1 , J a v R , J a v V J_1,J_{avR},J_{avV} J1,JavR,JavV,其策略梯度是 ∇ θ J ( θ ) = E π θ [ ∇ θ log π θ ( s , a ) Q π θ ( s , a ) ] \nabla_\theta J(\theta)=\color{red}{\mathbb{E}_{\pi_\theta}\left[\nabla_\theta\log\pi_\theta(s,a)\right.Q^{\pi_\theta}(s,a)}] ∇θJ(θ)=Eπθ[∇θlogπθ(s,a)Qπθ(s,a)]这种形式也是 ∂ J ( θ ) ∂ θ = E π θ [ ∂ l o g π θ ( a ∣ s ) ∂ θ Q π θ ( s , a ) ] \frac{\partial J(\theta)}{\partial\theta}=\mathbb{E}_{\pi_\theta}\left[\frac{\partial\mathrm{log}\pi_\theta(a|s)}{\partial\theta}Q^{\pi_\theta}(s,a)\right] ∂θ∂J(θ)=Eπθ[∂θ∂logπθ(a∣s)Qπθ(s,a)]
详细证明过程请参考:
- Rich Sutton’s Reinforcement Learning: An Introduction (2nd Edition)第13章
- 动手学强化学习策略梯度的附录
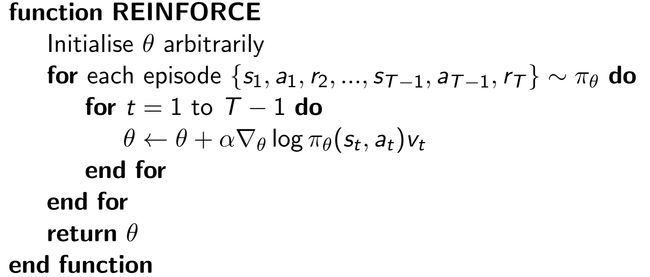
蒙特卡洛策略梯度(Monte-Carlo Policy Gradient)
- 利用随机梯度上升更新参数
- 利用策略梯度定理
- 利用累计奖励值 G t G_t Gt作为 Q π θ ( s , a ) Q^{\pi_\theta}(s,a) Qπθ(s,a)的无偏采样 Δ θ t = α ∂ log π θ ( a t ∣ s t ) ∂ θ G t \Delta\theta_t=\alpha\frac{\partial\log\pi_\theta(a_t|s_t)}{\partial\theta}G_t Δθt=α∂θ∂logπθ(at∣st)Gt
REINFORCE算法伪代码
Puck World Example
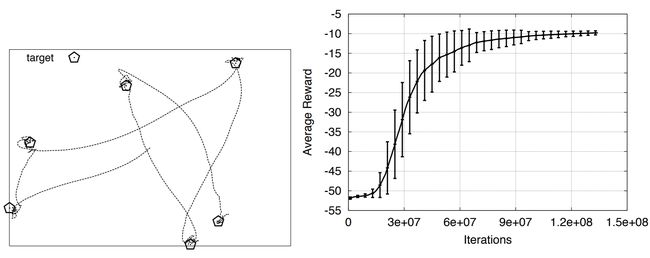
- 连续的动作对冰球施加较小的力
- 冰球接近目标可以得到奖励
- 目标位置每30秒重置一次
- 使用蒙特卡洛策略梯度方法训练策略
Softmax随机策略
对于具体策略的设计,通常使用Softmax随机策略。Softmax策略是一种非常常用的随机策略 π θ ( a ∣ s ) = e f θ ( s , a ) ∑ a ′ e f θ ( s , a ′ ) \pi_\theta(a|s)=\frac{e^{f_\theta(s,a)}}{\sum_{a^{\prime}}e^{f_\theta(s,a^{\prime})}} πθ(a∣s)=∑a′efθ(s,a′)efθ(s,a)式中, f θ ( s , a ) f_\theta(s,a) fθ(s,a)是用参数化的状态-动作对得分函数,可以预先定义。其对数似然的梯度是 ∂ log π θ ( a ∣ s ) ∂ θ = ∂ f θ ( s , a ) ∂ θ − 1 ∑ a ′ e f θ ( s , a ′ ) ∑ a ′ ′ e f θ ( s , a ′ ′ ) ∂ f θ ( s , a ′ ′ ) ∂ θ = ∂ f θ ( s , a ) ∂ θ − E a ′ ∼ π θ ( a ′ ∣ s ) [ ∂ f θ ( s , a ′ ) ∂ θ ] \begin{gathered} \frac{\partial\text{log}\pi_\theta(a|s)}{\partial\theta} \begin{aligned}=\frac{\partial f_\theta(s,a)}{\partial\theta}-\frac{1}{\sum_{a^{\prime}}e^{f_\theta(s,a^{\prime})}}\sum_{a^{\prime\prime}}e^{f_\theta(s,a^{\prime\prime})}\frac{\partial f_\theta(s,a^{\prime\prime})}{\partial\theta}\end{aligned} \\ =\frac{\partial f_\theta(s,a)}{\partial\theta}-\mathbb{E}_{a^{\prime}\sim\pi_\theta(a^{\prime}|s)}\left[\frac{\partial f_\theta(s,a^{\prime})}{\partial\theta}\right] \end{gathered} ∂θ∂logπθ(a∣s)=∂θ∂fθ(s,a)−∑a′efθ(s,a′)1a′′∑efθ(s,a′′)∂θ∂fθ(s,a′′)=∂θ∂fθ(s,a)−Ea′∼πθ(a′∣s)[∂θ∂fθ(s,a′)]
举线性得分函数为例,则有 f θ ( s , a ) = θ T x ( s , a ) ∂ log π θ ( a ∣ s ) ∂ θ = ∂ f θ ( s , a ) ∂ θ − E a ′ ∼ π θ ( a ′ ∣ s ) [ ∂ f θ ( s , a ′ ) ∂ θ ] = x ( s , a ) − E a ′ ∼ π θ ( a ′ ∣ s ) [ x ( s , a ′ ) ] \begin{aligned} &f_{\theta}(s,a)=\theta^{\mathrm{T}}x(s,a) \\ \frac{\partial\text{log}\pi_\theta(a|s)}{\partial\theta}& =\frac{\partial f_{\theta}(s,a)}{\partial\theta}-\mathbb{E}_{a^{\prime}\sim\pi_{\theta}(a^{\prime}|s)}\left[\frac{\partial f_{\theta}(s,a^{\prime})}{\partial\theta}\right] \\ &=x(s,a)-\mathbb{E}_{a^{\prime}\sim\pi_{\theta}(a^{\prime}|s)}[x(s,a^{\prime})] \end{aligned} ∂θ∂logπθ(a∣s)fθ(s,a)=θTx(s,a)=∂θ∂fθ(s,a)−Ea′∼πθ(a′∣s)[∂θ∂fθ(s,a′)]=x(s,a)−Ea′∼πθ(a′∣s)[x(s,a′)]
代码实践
class PolicyNet(torch.nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(PolicyNet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim)
self.fc2 = torch.nn.Linear(hidden_dim, action_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
return F.softmax(self.fc2(x), dim=1)
class REINFORCE:
def __init__(self, state_dim, hidden_dim, action_dim, learning_rate, gamma,
device, numOfEpisodes, env):
self.policy_net = PolicyNet(state_dim, hidden_dim, action_dim).to(device)
self.optimizer = torch.optim.Adam(self.policy_net.parameters(), lr=learning_rate)
self.gamma = gamma
self.device = device
self.env = env
self.numOfEpisodes = numOfEpisodes
# 根据动作概率分布随机采样
def takeAction(self, state):
state = torch.tensor(np.array([state]), dtype=torch.float).to(self.device)
action_probs = self.policy_net(state)
action_dist = torch.distributions.Categorical(action_probs)
action = action_dist.sample()
return action.item()
def update(self, transition_dict):
reward_list = transition_dict['rewards']
state_list = transition_dict['states']
action_list = transition_dict['actions']
G = 0
self.optimizer.zero_grad()
for i in reversed(range(len(reward_list))):
reward = reward_list[i]
state = torch.tensor(np.array([state_list[i]]), dtype=torch.float).to(self.device)
action = torch.tensor(np.array([action_list[i]]), dtype=torch.int64).view(-1, 1).to(self.device)
log_prob = torch.log(self.policy_net(state).gather(1, action))
G = self.gamma * G + reward
loss = -log_prob * G # 每一步的损失函数
loss.backward() # 反向传播计算梯度
self.optimizer.step() # 梯度下降
def REINFORCERun(self):
returnList = []
for i in range(10):
with tqdm(total=int(self.numOfEpisodes / 10), desc='Iteration %d' % i) as pbar:
for episode in range(int(self.numOfEpisodes / 10)):
# initialize state
state, info = self.env.reset()
terminated = False
truncated = False
episodeReward = 0
transition_dict = {
'states': [],
'actions': [],
'next_states': [],
'rewards': [],
'terminateds': [],
'truncateds':[]
}
# Loop for each step of episode:
while (not terminated) or (not truncated):
action = self.takeAction(state)
next_state, reward, terminated, truncated, info = self.env.step(action)
if terminated or truncated:
break
transition_dict['states'].append(state)
transition_dict['actions'].append(action)
transition_dict['next_states'].append(next_state)
transition_dict['rewards'].append(reward)
transition_dict['terminateds'].append(terminated)
transition_dict['truncateds'].append(truncated)
state = next_state
episodeReward += reward
self.update(transition_dict)
returnList.append(episodeReward)
if (episode + 1) % 10 == 0: # 每10条序列打印一下这10条序列的平均回报
pbar.set_postfix({
'episode':
'%d' % (self.numOfEpisodes / 10 * i + episode + 1),
'return':
'%.3f' % np.mean(returnList[-10:])
})
pbar.update(1)
return returnList
结果
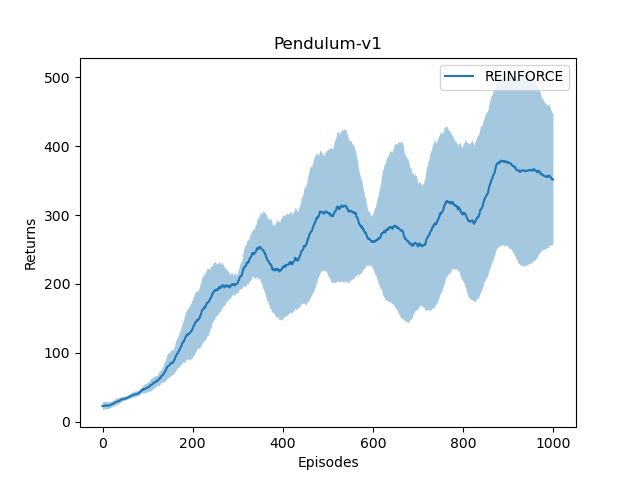
可以看到,随着收集到的轨迹越来越多,REINFORCE 算法有效地学习到了最优策略。不过,相比于前面的 DQN 算法,REINFORCE 算法使用了更多的序列,这是因为 REINFORCE 算法是一个在线策略算法,之前收集到的轨迹数据不会被再次利用。此外,REINFORCE 算法的性能也有一定程度的波动,这主要是因为每条采样轨迹的回报值波动比较大,这也是 REINFORCE 算法主要的不足。
REINFORCE 算法是策略梯度乃至强化学习的典型代表,智能体根据当前策略直接和环境交互,通过采样得到的轨迹数据直接计算出策略参数的梯度,进而更新当前策略,使其向最大化策略期望回报的目标靠近。这种学习方式是典型的从交互中学习,并且其优化的目标(即策略期望回报)正是最终所使用策略的性能,这比基于价值的强化学习算法的优化目标(一般是时序差分误差的最小化)要更加直接。 REINFORCE 算法理论上是能保证局部最优的,它实际上是借助蒙特卡洛方法采样轨迹来估计动作价值,这种做法的一大优点是可以得到无偏的梯度。但是,正是因为使用了蒙特卡洛方法,REINFORCE 算法的梯度估计的方差很大,可能会造成一定程度上的不稳定,这也是后面将介绍的 Actor-Critic 算法要解决的问题。
参考
[1] 伯禹AI
[2] https://www.davidsilver.uk/teaching/
[3] 动手学强化学习
[4] Reinforcement Learning