基于Arduino、ESP8266的物联网项目开发方案整理、毕业设计(第二波)
文章目录
-
- 1、背景
- 2、项目整理
-
- 2.1 Home Office —— 在家办公时调节休息的灯
-
- 2.1.1 功能介绍
- 2.1.2 实物图片
- 2.1.3 视频
- 2.1.4 源代码
- 2.2 仿生珊瑚
-
- 2.2.1 功能介绍
- 2.2.2 实物图片
- 2.2.3 视频
- 2.2.4 源代码
- 2.3 气体传感器 —— 气体检测
-
- 2.3.1 功能介绍
- 2.3.2 实物图片
- 2.3.3 视频
- 2.3.4 源代码
- 2.4 气体采集平台
-
- 2.4.1 功能介绍
- 2.4.2 实物图片
- 2.4.3 视频
- 2.4.4 源代码
- 3、如何联系我们
博主联系方式汇总(非诚勿扰)
博主联系方式汇总(非诚勿扰)
博主联系方式汇总(非诚勿扰)
1、背景
了解博哥的同学都知道,作为一名电子爱好者,博哥除了平时乐于分享基础知识之外,还需要肩负起减轻家庭负担的责任(毕竟从农村走出来的孩子)。
目前,一般加博哥好友的人大概可以分为两类:
- 学习知识(这一部分目前基本上都很
正常运转起来,更多人还是喜欢我的ESP8266开发系列,主要着重点在于基础) - 项目开发、毕业设计等(这一部分内容缺失,没有一系列的帖子去
记录过博哥有经历过哪些项目开发,不一定是我开发的。。。。)
所以,经过仔细考虑还是需要去介绍一下一些项目开发整理。
2、项目整理
主要分为几个项目:
- Home Office
- 仿生珊瑚
- 气体传感器
- 气体采集平台
2.1 Home Office —— 在家办公时调节休息的灯
2.1.1 功能介绍
- 0、用户A是个设计师,疫情在家工作也常常要加班。
大量的工作很容易让他烦躁并且缺乏休息(用户背景)。 - 1、当时间到达T1(hh1:mm1:ss1)时、表示上班时间到了。随着时间的推移,光线会慢慢变暗(
人工拉动窗帘或者遮挡光敏传感器)如果光敏电阻检测到环境暗,则灯环自动亮暖色(环境越暗灯环越亮)。//这里是避免由于忘记开灯,伤害眼睛 - 2、连续亮了t分钟后,灯变暗变绿色
呼吸灯效果, MP3模块播放音乐,提醒用户A休息。 - 3、 只有当人手摸着心率/心跳传感器,检测到稳定(舒畅的状态)时,心跳稳定且平静则恢复1中的暖光,这时重新计时t。//比如像我这种工作狂 灯一灭就想立刻重启继续,那就要心跳传感器给予验证,脉搏是OK的才行
- 4、需要去休息时,点击开关按钮, 灯进入休眠(关闭灯),到第二天的T2(hh2:mm2:ss2)再次开启。
- 5、测试的时候,T1和T2可以设置的间隔短一点,比如5分钟。
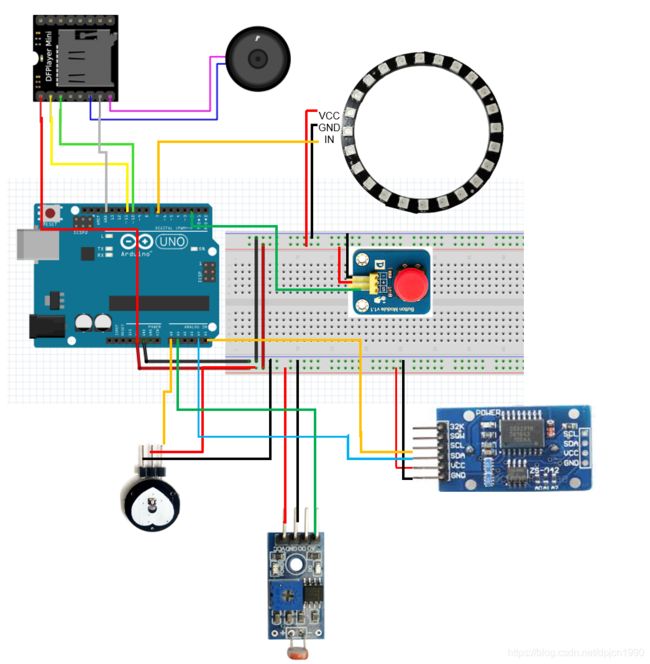
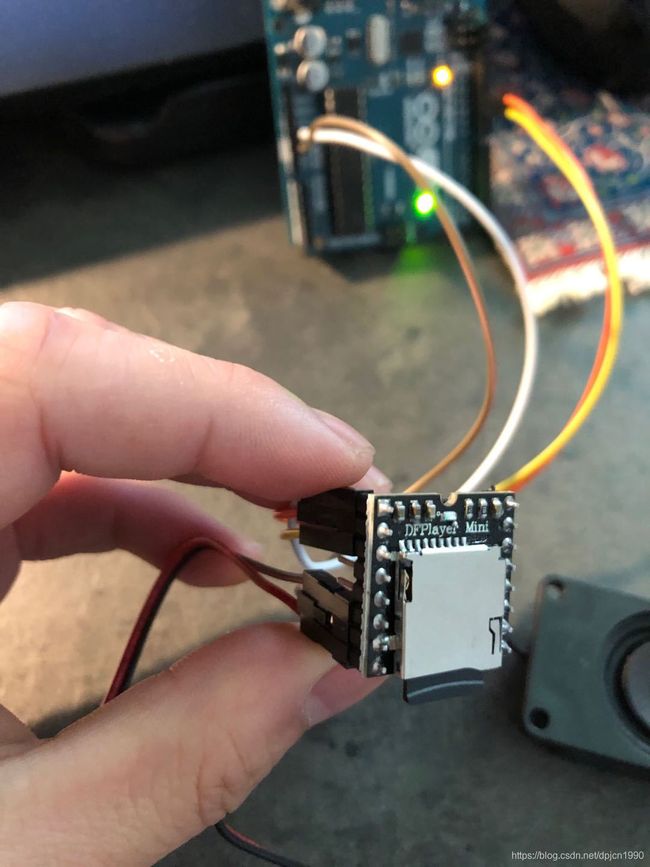
2.1.2 实物图片
1、1Arduino nano或uno
2、1DS3231时钟模块(含纽扣电池)
3、1光敏电阻(模块)
4、124位 WS2812LED灯环
5、1无源蜂鸣器/mp3模块
6、1心率传感器/心跳传感器
7、1*9v电池
8、其他可能需要的元器件(面包板、按钮、电阻、电容、导线等)


2.1.3 视频
演示视频暂时无法上传(需要的可以另外帖子留言)
2.1.4 源代码
#include 2.2 仿生珊瑚
2.2.1 功能介绍
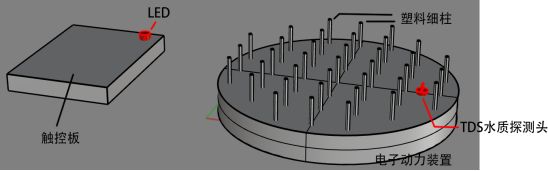
- 1、用户通过在触控板绘制上图“米”字所示的横线“一”,“|”,“╱”,“╲”这四个的任意一个,来控制圆盘上面的塑料柱。
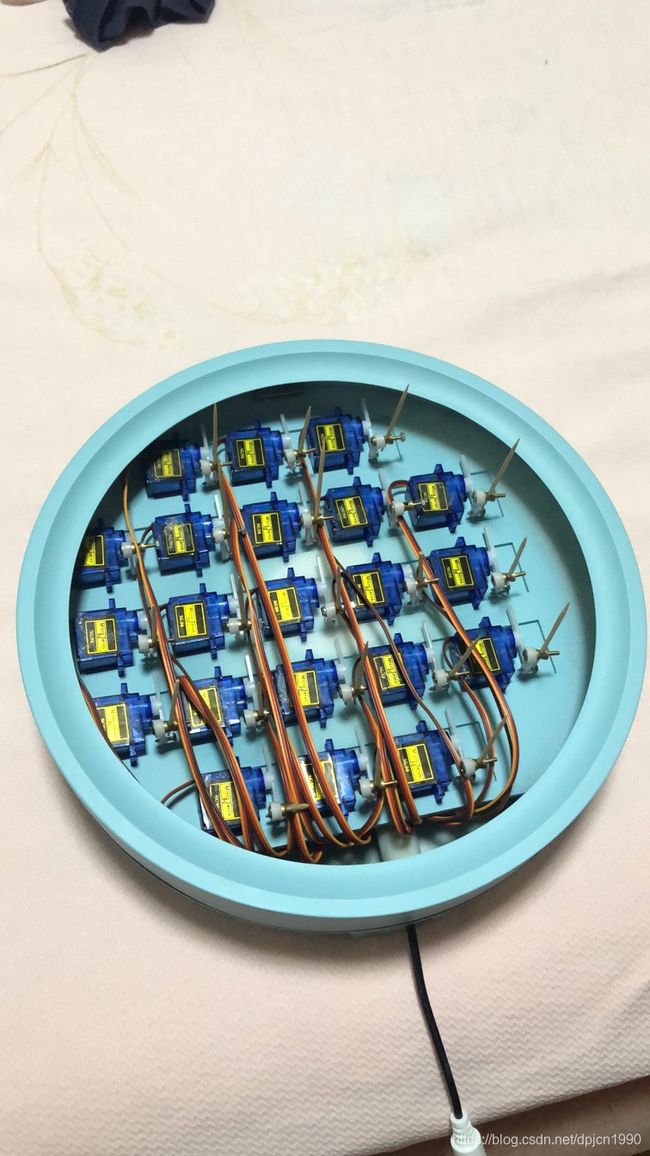
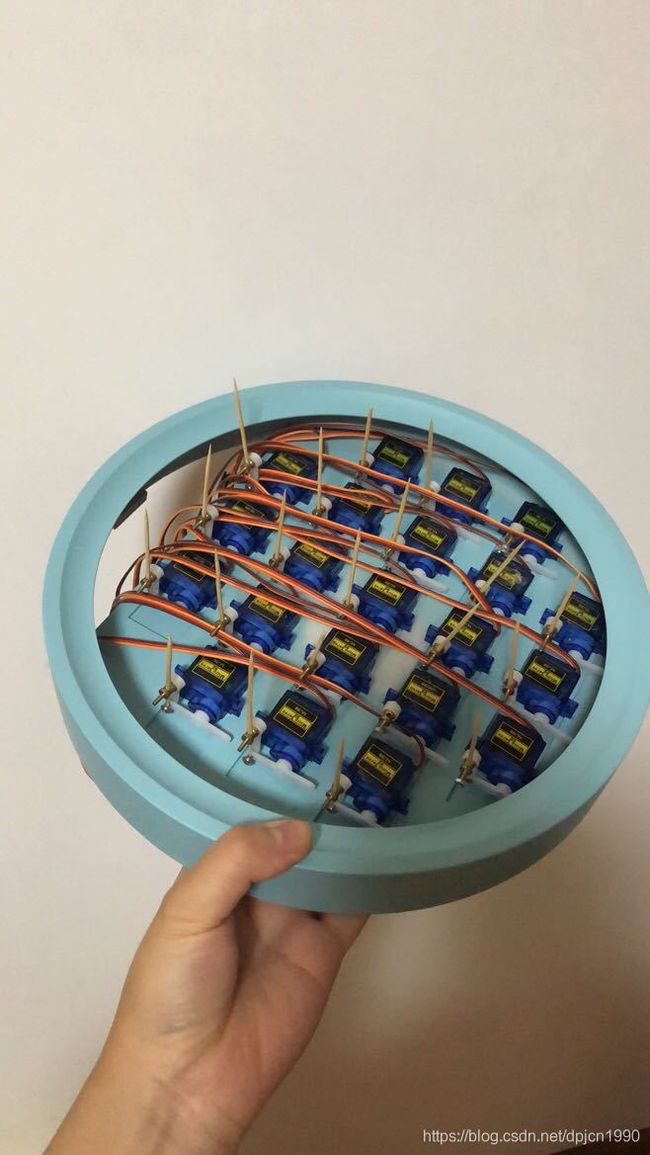
- 2、举个例子,当客户绘制“一”后,就从如右上图这排(记为A)开始,往两边扩散形成水波效果。具体的时间就是,A在1s内下去1cm,然后在1s内又复原。在A开始下去的0.3s后,A两边的也开始在1s下去。如此控制,直到最外边的也控制完。
- 3、当TDS模块采集的值超过250时,圆盘由最中心的点,往外扩散,形成水滴散开的效果。
- 4、最好是可以支持绘制“~”型图案。


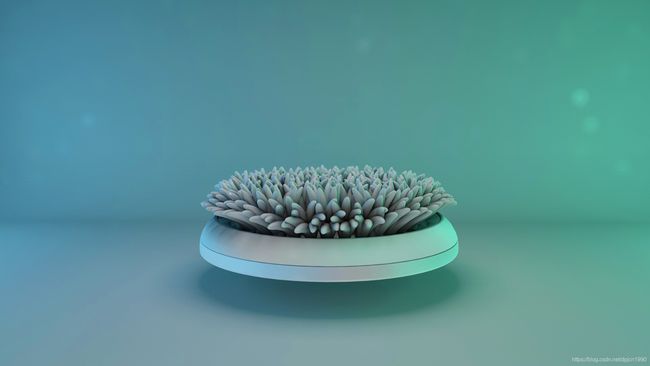
2.2.2 实物图片
1、1Arduino uno 或 mega
2、1TDS模块
3、37电机
4、1无线模块
5、1接收模块
6、1触摸板






2.2.3 视频
演示视频暂时无法上传(需要的可以另外帖子留言)
2.2.4 源代码
#include 2.3 气体传感器 —— 气体检测
2.3.1 功能介绍


- 1、气体芯片的大小约1.5*1.5cm大小,如上图所示,
16个圆圈对应16个气体检测通道。气体浓度越大,阻值越大。室内通常情况下就是1M欧姆左右,浓度加大阻值可以去到3M欧姆。 - 2、每个通道外接一个分压电阻,分压电阻和气体芯片直接连接到ADS1256芯片,每个ADS芯片有8个通道,因此需要两片ADS。
ADS是24位精度ADC采集芯片。
3、不需要计算具体的气体浓度值,用电压值的形式表示就行。并显示在HMI显示屏。 - 4、当然也需要把数据写入SD内存卡。
- 5、并
预留蓝牙接口,把数据也通过蓝牙实时发送出去。 - 6、通过锂电池供电,并板载锂电池充电电路。
2.3.2 实物图片
1、1ATmega328p
2、4 ADS1115芯片
3、13.5寸HMI显示屏
4、1气体芯片
5、1SD卡
6、16电阻

2.3.3 视频
演示视频暂时无法上传(需要的可以另外帖子留言)
2.3.4 源代码
#include 2.4 气体采集平台
2.4.1 功能介绍
- 1、CCS811采集CO2的ppm值。
- 2、MICS6814或4541采集CO、NO2、C2H5OH、H2、NH3、CH4、C3H8、C4H10的ppm值。
- 3、ppm显示在HMI显示屏。
- 4、当然也需要把数据写入SD内存卡。
- 5、并预留蓝牙接口,把数据也通过蓝牙实时发送出去。
- 6、通过锂电池供电,并板载锂电池充电电路。
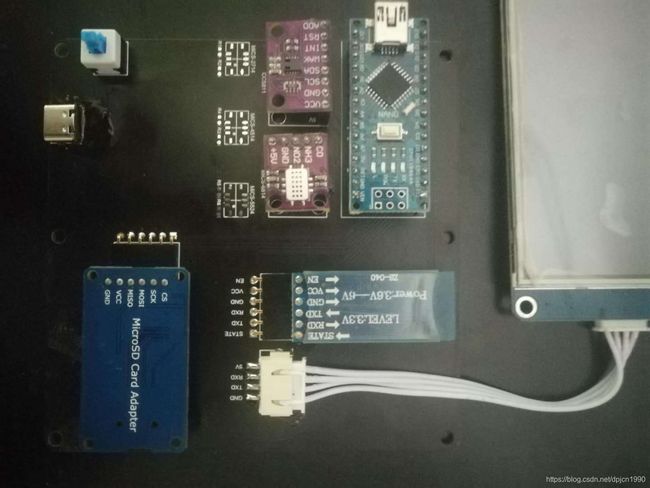
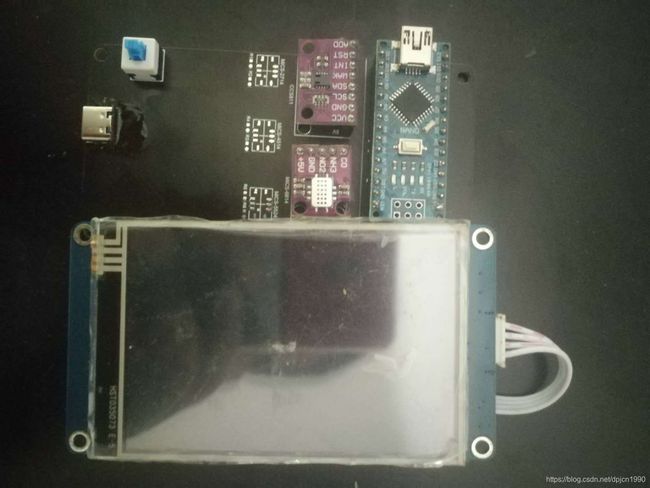
2.4.2 实物图片
1、1ATmega328p
2、13.5寸HMI显示屏
3、1CCS811芯片
4、1MICS6814或4541芯片
5、1*SD卡
2.4.3 视频
演示视频暂时无法上传(需要的可以另外帖子留言)
2.4.4 源代码
#include 3、如何联系我们
博主联系方式汇总(非诚勿扰)