字符设备驱动(实验一)——保姆级教程
文章目录
- 前言
- 环境搭建
-
- CLion 远程服务配置
- 创建项目
- 修改CMakeLists.txt文件
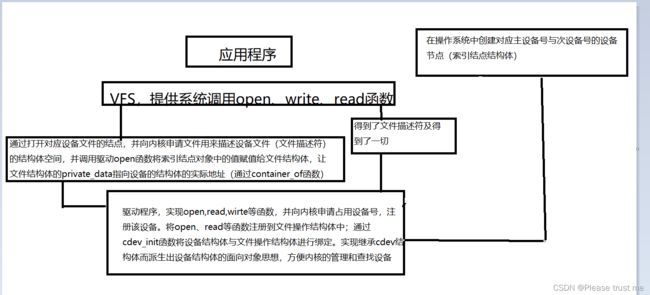
- 应用程序与驱动的关系
- cdev与设备结构体的关系
- 项目源码
-
- 驱动代码
- 应用程序
- Makefile
- 开发板测试
- Ubuntu测试
- Tips
- Git下载
前言
这里采用的模拟方法是在内核空间开辟一段内存空间来模拟一个字符设备,其功能就是可以对这块内存空间实现读写的功能,和mmap的功能和原理相似,只是实现方法不同。
环境搭建
这里使用的工具是CLion进行编写代码,在虚拟机上进行编译身成.ko文件。因为只是一个模拟嘛,入门。不需要配置设备树啥的,所以也就不在开发板上进行操作了。(操作相同)
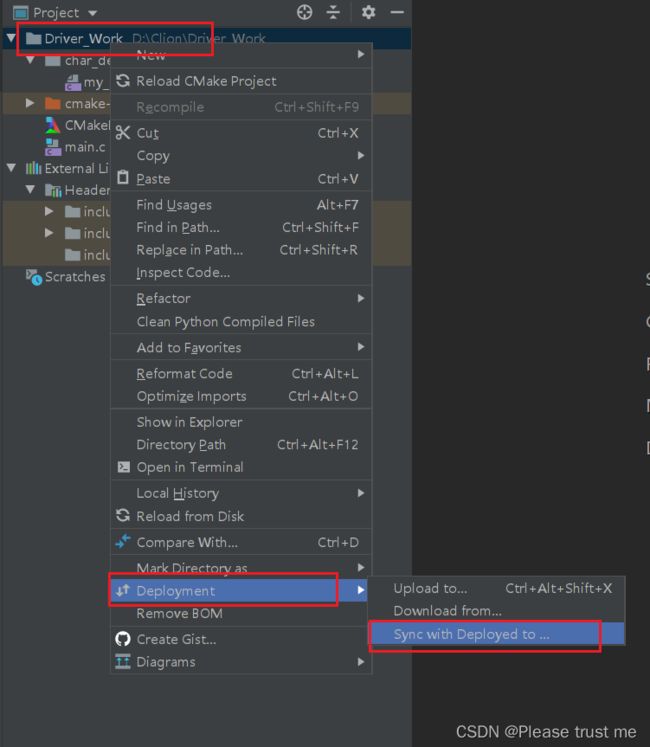
CLion 远程服务配置
推荐------------B站UP主海牛Rocky
创建项目

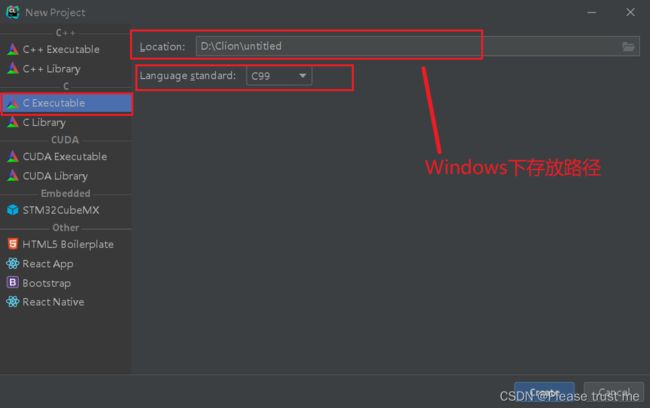




修改CMakeLists.txt文件

cmake_minimum_required(VERSION 3.10)
project(Driver_Work C)
set(ROOT_DIR "/home/jacky/100ask_stm32mp157_pro-sdk/Linux-5.4")
#头文件目录位置
include_directories(
"${ROOT_DIR}/include"
"${ROOT_DIR}/arch/arm/include"
)
# 控制程序走向,目的就是为了不破坏内核源码,又可以添加我们自己的功能
add_definitions(-D__KERNEL__)
add_definitions(-D__GNUC__)
add_definitions(-DMODULE)
#设置语言标准,我这里没加-stdnolib,因为我这个CLion好像有bug,加了-stdnolib所有的头文件都无法使用
#而这个-stdnolib的目的只是取消掉标准C库的头文件
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -std=gnu99 ")
add_executable(Driver_Work main.c)
![]()
看到CLion打印这个就成功了,直接在工程目录中创建一个.c文件即可
应用程序与驱动的关系
cdev与设备结构体的关系
基类与派生类的关系

项目源码
下面的代码解释都放在注释中,尽可能地将语言变得通俗易懂
驱动代码
globalmem_chardev.c
#include 应用程序
app01.c
#include Makefile
#Ubuntu内核目录
KERN_DIR := /lib/modules/$(shell uname -r)/build
#STM32MP157内核目录
#CROSS_COMILE :=arm-buildroot-linux-gnueabihf-
#KERN_DIR := /home/jacky/100ask_stm32mp157_pro-sdk/Linux-5.4
#防止出现污染内核的错误
CONFIG_MODULE_SIG=n
all:
make -C $(KERN_DIR) M=`pwd` modules
$(CROSS_COMILE)gcc -o globalmem_test app01.c
.PHONY:clean
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order globalmem_test
globalmem-y :=globalmem_chardev.o
obj-m +=globalmem.o
开发板测试
编译,记住这里要开启交叉编译链,并设置好Makefile中的KERN_DIR

拷贝到开发板,并挂载驱动,创建设备节点,这里采用指定主设备号

 测试成功
测试成功
Ubuntu测试
编译,设置为gcc编译,修改Makefile中KERN_DIR
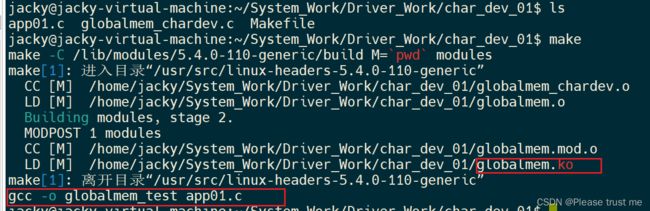
挂载驱动,创建设备节点,这里采用系统分配设备主设备号

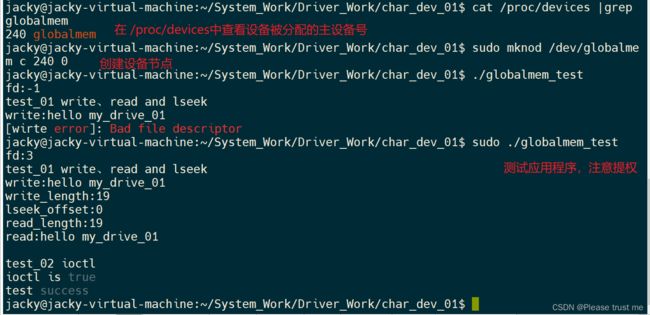
完成
Tips
1.尽量在开发板上进行调试,因为如果你的驱动有错误,很可能会造成虚拟机死机。这样就很麻烦,开发板直接关机再开就行。
2.有些地方会出现很不容易找到错误的地方,比如我这次驱动中我在globalmem_init函数最后忘记return 0;了。结果驱动还挂载成功了,但是无法在/proc/devices中查看,以及在read函数中,上锁后,忘记开锁了。导致测试程序运行了就卡死了。大家一定要注意,细心。
Git下载
Git
