【ROS】ros环境配置与基础回顾
心口如一,犹不失为光明磊落丈夫之行也。——梁启超
文章目录
-
- :smirk:1. ros环境安装
- :blush:2. ros命令与工具
- :satisfied:3. helloworld节点创建
- :smirk:4. 日志消息
- :smirk:5. ros程序打包
1. ros环境安装
官网:https://www.ros.org/
中文wiki:http://wiki.ros.org/cn
ubuntu安装ros:http://wiki.ros.org/cn/melodic/Installation/Ubuntu
ros安装最常见的是在ubuntu系统中,有amd64和arm64两种,安装流程如下:
- 配置Ubuntu软件仓库
- 设置sources.list
- 设置密钥
- 安装ros-distro
- 初始化 rosdep(包含rosdep init和rosdep update)
- 设置环境
- 构建工厂依赖
之前常见的是在第5步出现问题卡住,原因是ros的github仓库国内网络访问缓慢,有这几种解决方法:
- 用手机热点更新:rosdep依赖下载的就是从
https://github.com/ros/rosdistro这个repo里的yaml文件,大家知道,手机一般是能访问github的,因此rosdep update这步用手机热点一般是能更新成功。- 将rosdistro下载到本地:手动改URL路径,把
https://raw.githubusercontent.com/ros替换为file:///home/xxx/Software- 将rosdistro转存到gitee仓库:将
https://raw.githubusercontent.com/ros替换为https://gitee.com/ros
后来,一位机器人领域的大佬自制了一个安装工具,让我们终于不用花时间在安装上了,简直是太良心,不用浪费生命了。这就是小鱼一键安装ROS工具:
wget http://fishros.com/install -O fishros && . fishros
包含了换源、选择ROS版本等操作选项,极为方便,从此安装ROS不再烦恼!大佬网址在这:http://fishros.com/#/fish_home
当然如果确实想用rosdep工具,也可用以下方法试试:
# 首先下载20-default.list(和运行sudo rosdep init是一样的效果)
sudo mkdir -p /etc/ros/rosdep/sources.list.d/
sudo curl -o /etc/ros/rosdep/sources.list.d/20-default.list https://mirrors.tuna.tsinghua.edu.cn/github-raw/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
# 然后更新配置
echo 'export ROSDISTRO_INDEX_URL=https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml' >> ~/.bashrc
source ~/.bashrc
# 最后重新执行
rosdep update
ros安装完成后,可通过在命令行输入roscore查看主节点启动信息;

然后启动小乌龟节点:rosrun turtlesim turtlesim_node
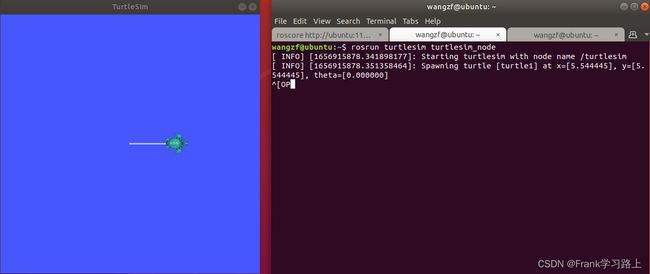
最后启动键盘控制节点:rosrun turtlesim turtle_teleop_key
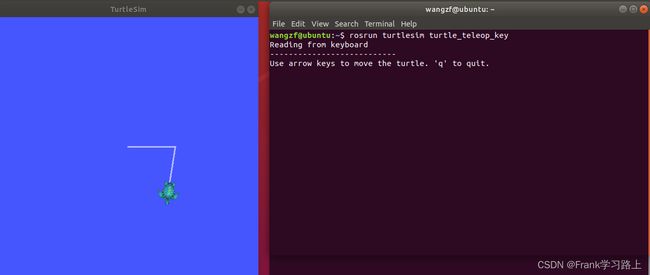
以上是ros的简单示例,通过这个有趣的例子让大家能对ros有基本的认知。
2. ros命令与工具
随着ros的流行,相关的学习媒介也越来越多,除了官网和书籍外,还有古月居、创客智造、赵虚左等都有ros的相关教程,这里就不放链接了,网上很容易找到。
ros的基本组成单元是节点。节点之间的通信有消息通信(发布/订阅,msg定义数据结构)、服务通信(请求/响应,srv定义数据结构)、动作通信三种,但最常用的是消息通信,通信的形式一般是话题即/topic。消息传递的理念是:当节点想要分享消息时,可以发布(publish)消息到对应话题;当节点想要接收消息时,可以订阅(subscribe)所需要的话题。
节点之间的话题可以用bag的形式存储下来,并可以重播。当节点内有些参数需要配置时,可以使用参数服务器rosparam来配置。
常用命令:
roscore # 主节点,会启动节点管理器
rosrun package_name node_name # 启动节点
# 显示设置节点名称 __name:=node-name
# 指定命名空间 __ns:=namespace
roslaunch package_name xxx.launch # 启动多节点
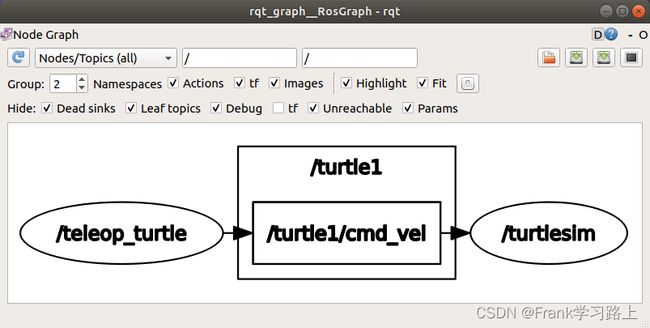
rosnode list # 查看node列表 rqt_graph 查看节点计算图
rosnode kill # 终止节点 rosnode cleanup 终止后清除
rostopic list # 查看topic列表
rosservice list # 查看service列表
rosservice call # 调用服务
rosmsg list # 查看msg列表
rosparam list # 查看param列表
rosbag record/play # 数据包记录/重播
rospack find # 找到软件包目录
rosls # 查看目录下的文件
roscd # 切换到软件包目录
rostopic hz # 发布频率(每秒发布的消息数量)
rostopic bw # 发布带宽(每秒消息所占字节数)
roslaunch # 多节点启动(有多种参数可调)
常用工具:
rviz
rqt
rosrun rqt_publisher rqt_publisher # rqt界面手动发送数据
gazebo
3. helloworld节点创建
创建ros工程的一般流程如下:
- 创建工作空间:
mkdir catkin_ws && cd catkin_ws - 创建源文件目录:
mkdir src && cd src - 使用
catkin_create_pkg命令来创建一个名为beginner_tutorials的新程序包。 这个程序包依赖于std_msgs、roscpp和rospy:catkin_create_pkg beginner_tutorials std_msgs rospy roscpp - 返回catkin工程目录并编译:
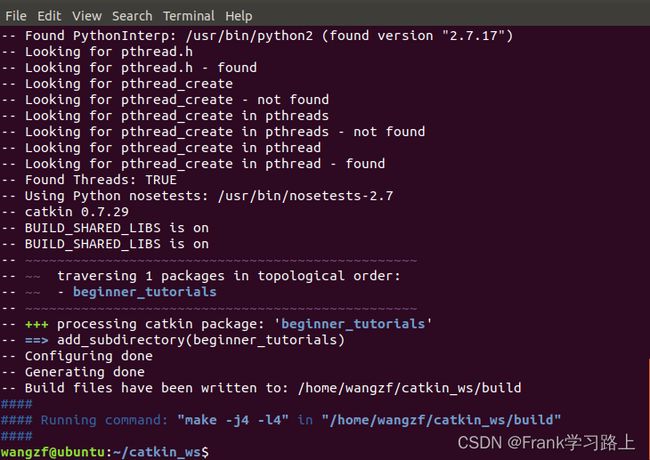
cd ~/catkin_ws && catkin_make
C++创建ros节点helloworld:
定义msg消息:
Header header
int64 num
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/TwistWithCovariance twist
找到CMakeLists.txt和package.xml添加消息的构建与运行(这个要练习并熟悉)。
基于msg消息,编写发布器节点和订阅器节点,实现话题通信。
发布器talker.cpp:
/*
* 代码思路如下:
* 1.初始化ROS系统
* 2.在ROS网络内广播我们将要在chatter topic上发布std_msgs/String消息
* 3.以每秒10次的频率在chatter上发布消息
*/
##include "ros/ros.h"
##include "std_msgs/String.h"
##include <sstream>
/**
* This tutorial demonstrates simple sending of messages over the ROS system.
*/
int main(int argc, char **argv)
{
ros::init(argc, argv, "talker");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
ros::Rate loop_rate(10); // ros::Rate 可以考虑循环中其他部分消耗的时间
int count = 0;
while (ros::ok())
{
std_msgs::String msg;
std::stringstream ss;
ss << "hello ! ROS world !" << count;
msg.data = ss.str();
ROS_INFO("%s", msg.data.c_str());
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
++count;
}
return 0;
}
订阅器listener.cpp:
/*
* 1.初始化ROS系统
* 2.订阅chatter topic
* 3.进入自循环,等待消息的到达
* 4.当消息到达,调用chatterCallback()函数
*/
##include "ros/ros.h"
##include "std_msgs/String.h"
/**
* This tutorial demonstrates simple receipt of messages over the ROS system.
*/
// 回调函数
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard: [%s]", msg->data.c_str());
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback); // &可选,获取函数指针
ros::spin(); // 自循环,等待并执行回调函数,相当于在while循环里调用ros::spinOnce()
return 0;
}
然后运行catkin_make编译,会生成talker和listener两个可执行文件,存储到devel/lib目录。
服务通信类似,用到的时候再学习就行;另外,如果是python玩家,也可以用python实现。
参数服务器(给节点设置参数)参考:
http://t.csdn.cn/pYEpb
http://t.csdn.cn/zyL12
另外,默认ros的编译是以debug模式编译的,如果想打包release,运行命令:
catkin build --cmake-args -DCMAKE_BUILD_TYPE=Release
或者在cmake中设置:SET(CMAKE_BUILD_TYPE "Release")
4. 日志消息
程序中用于排查问题的简短文本字符流,即日志消息,根据严重级别,可分为DEBUG INFO WARN ERROR FATAL。输出指令分别为:
ROS_DEBUG_STREAM("")
ROS_INFO_STREAM("")
ROS_WARN_STREAM("")
ROS_ERROR_STREAM("")
ROS_FATAL_STREAM("")
// 若要生成一次性日志消息,加上ONCE
ROS_INFO_STREAM_ONCE("")
rosout节点会默认生成日志文件保存到~/.ros/log中,一段时间后,日志会大于1G,我们可以通过以下命令查看日志大小和清除:
rosclean check
rosclean purge
ros默认会生成INFO级别以上的日志,可通过rqt_logger_level界面来设置日志级别,也可在C++代码中设置:
#include 5. ros程序打包
在实际工程中,为避免在机器人上直接放源码编译,最好还是打包成deb,再部署到环境中。
有两篇教程,使用bloon和fakeroot来打包程序:
https://juejin.cn/post/7136394709219409933
https://zhuanlan.zhihu.com/p/578951132
但在实际执行bloom-generate rosdebian --os-name ubuntu --ros-distro melodic的时候,遇到个问题,各位博友看有没有遇到过的?
==> Generating debs for ubuntu:bionic for package(s) ['test_msgs']
No homepage set, defaulting to ''
Could not resolve rosdep key 'roscpp'
Try to resolve the problem with rosdep and then continue.
Continue [Y/n]? n
GeneratorError: Error running generator: Failed to resolve rosdep key 'roscpp', aborting.
另外,也有一种简单的打包方式,即通过catkin_make install的方式:
# 编译install(会生成install目录,包含include、lib和share等文件)
catkin_make install
# 然后要将devel中lib目录下的节点名目录拷贝到install中lib目录下
# 最后,如果有config配置文件的,放在install目录中即可
# 依次执行即可

以上!