C++ 3D人脸重建,人头姿势估计,人脸Mesh
说明
该Demo使用 VS2022+opencv-4.8.1+Microsoft.ML.OnnxRuntime.1.12.1
我的opencv-4.8.1安装位置
如果你的opencv版本和位置和我一致,那么该Demo你可以直接运行。
opencv-4.8.1-windows.exe 下载
如果不一致,你需要设置:
1、包含目录、库目录设置

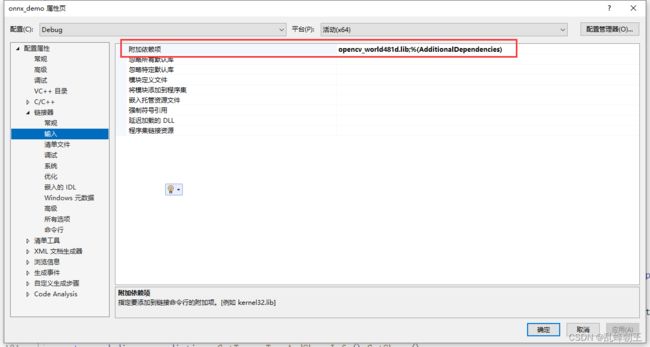
2、附加依赖项设置
3、并将dll拷贝到项目可运行程序同级目录下
注意:
Debug是opencv_world481d.dll
Release是opencv_world481.dll
注意附加依赖项:
Debug是opencv_world481d.lib
Release是opencv_world481.lib
效果-pose
效果-sparse
效果-dense
效果-mesh
项目
代码
#define _CRT_SECURE_NO_WARNINGS
#include
#include
#include
#include
#include
//#include
#include
#include"utils.h"
using namespace std;
using namespace cv;
using namespace Ort;
typedef struct BoxInfo
{
int x1;
int y1;
int x2;
int y2;
float score;
int label;
} BoxInfo;
class Detect_Face
{
public:
Detect_Face(float confThreshold);
vector detect(Mat frame);
void drawPred(Mat& frame, vector bboxes);
private:
int inpWidth;
int inpHeight;
int num_proposal;
int nout;
float confThreshold;
vector input_image_;
void normalize_(Mat img);
Env env = Env(ORT_LOGGING_LEVEL_ERROR, "Detect Face");
Ort::Session* ort_session = nullptr;
SessionOptions sessionOptions = SessionOptions();
vector input_names;
vector output_names;
vector> input_node_dims; // >=1 outputs
vector> output_node_dims; // >=1 outputs
};
Detect_Face::Detect_Face(float confThreshold)
{
this->confThreshold = confThreshold;
string model_path = "weights/RFB-320_240x320_post.onnx";
std::wstring widestr = std::wstring(model_path.begin(), model_path.end());
//OrtStatus* status = OrtSessionOptionsAppendExecutionProvider_CUDA(sessionOptions, 0);
sessionOptions.SetGraphOptimizationLevel(ORT_ENABLE_BASIC);
ort_session = new Session(env, widestr.c_str(), sessionOptions);
size_t numInputNodes = ort_session->GetInputCount();
size_t numOutputNodes = ort_session->GetOutputCount();
AllocatorWithDefaultOptions allocator;
for (int i = 0; i < numInputNodes; i++)
{
input_names.push_back(ort_session->GetInputName(i, allocator));
Ort::TypeInfo input_type_info = ort_session->GetInputTypeInfo(i);
auto input_tensor_info = input_type_info.GetTensorTypeAndShapeInfo();
auto input_dims = input_tensor_info.GetShape();
input_node_dims.push_back(input_dims);
}
for (int i = 0; i < numOutputNodes; i++)
{
output_names.push_back(ort_session->GetOutputName(i, allocator));
Ort::TypeInfo output_type_info = ort_session->GetOutputTypeInfo(i);
auto output_tensor_info = output_type_info.GetTensorTypeAndShapeInfo();
auto output_dims = output_tensor_info.GetShape();
output_node_dims.push_back(output_dims);
}
this->inpHeight = input_node_dims[0][2];
this->inpWidth = input_node_dims[0][3];
}
void Detect_Face::normalize_(Mat img)
{
// img.convertTo(img, CV_32F);
int row = img.rows;
int col = img.cols;
this->input_image_.resize(row * col * img.channels());
for (int c = 0; c < 3; c++)
{
for (int i = 0; i < row; i++)
{
for (int j = 0; j < col; j++)
{
float pix = img.ptr(i)[j * 3 + c];
this->input_image_[c * row * col + i * col + j] = (pix - 127.5) / 127.5;
}
}
}
}
void Detect_Face::drawPred(Mat& frame, vector bboxes)
{
for (size_t i = 0; i < bboxes.size(); ++i)
{
int xmin = bboxes[i].x1;
int ymin = bboxes[i].y1;
rectangle(frame, Point(xmin, ymin), Point(bboxes[i].x2, bboxes[i].y2), Scalar(0, 0, 255), 2);
string label = format("Face:%.2f", bboxes[i].score);
//label = "Face:" + label;
putText(frame, label, Point(xmin, ymin - 5), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 255, 0), 1);
}
}
vector Detect_Face::detect(Mat frame)
{
Mat dstimg;
cvtColor(frame, dstimg, COLOR_BGR2RGB);
resize(dstimg, dstimg, Size(this->inpWidth, this->inpHeight));
this->normalize_(dstimg);
array input_shape_{ 1, 3, this->inpHeight, this->inpWidth };
auto allocator_info = MemoryInfo::CreateCpu(OrtDeviceAllocator, OrtMemTypeCPU);
Value input_tensor_ = Value::CreateTensor(allocator_info, input_image_.data(), input_image_.size(), input_shape_.data(), input_shape_.size());
// 开始推理
vector ort_outputs = ort_session->Run(RunOptions{ nullptr }, &input_names[0], &input_tensor_, 1, output_names.data(), output_names.size()); // 开始推理
Ort::Value& predictions = ort_outputs.at(0);
auto pred_dims = predictions.GetTensorTypeAndShapeInfo().GetShape();
num_proposal = pred_dims.at(0);
nout = pred_dims.at(1);
vector bboxes;
int n = 0; ///batchno , classid , score , x1y1x2y2
const float* pdata = predictions.GetTensorMutableData();
for (n = 0; n < this->num_proposal; n++) ///特征图尺度
{
const float class_socre = pdata[2];
if (class_socre >= this->confThreshold)
{
int xmin = int(pdata[3] * (float)frame.cols);
int ymin = int(pdata[4] * (float)frame.rows);
int xmax = int(pdata[5] * (float)frame.cols);
int ymax = int(pdata[6] * (float)frame.rows);
bboxes.push_back(BoxInfo{ xmin, ymin, xmax, ymax, class_socre, int(pdata[1]) });
}
pdata += nout;
}
return bboxes;
}
class Face_Mesh
{
public:
Face_Mesh(string mode);
void detect(Mat& frame, vector faces);
~Face_Mesh(); // 这是析构函数, 释放内存
private:
int inpWidth;
int inpHeight;
string mode;
int edge_size;
const int ntri = 76073;
int* triangles;
vector input_image_;
void normalize_(vector imgs);
Env env = Env(ORT_LOGGING_LEVEL_ERROR, "Face Mesh");
Ort::Session* ort_session = nullptr;
SessionOptions sessionOptions = SessionOptions();
vector input_names;
vector output_names;
vector> input_node_dims; // >=1 outputs
vector> output_node_dims; // >=1 outputs
};
Face_Mesh::Face_Mesh(string mode)
{
this->mode = mode;
string model_path;
if (mode == "pose" || mode == "sparse")
{
model_path = "weights/sparse_face_Nx3x120x120.onnx";
}
else if (mode == "dense" || mode == "mesh")
{
model_path = "weights/dense_face_Nx3x120x120.onnx";
}
else
{
cout << "input mode is error" << endl;
exit(100);
}
std::wstring widestr = std::wstring(model_path.begin(), model_path.end());
//OrtStatus* status = OrtSessionOptionsAppendExecutionProvider_CUDA(sessionOptions, 0);
sessionOptions.SetGraphOptimizationLevel(ORT_ENABLE_BASIC);
ort_session = new Session(env, widestr.c_str(), sessionOptions);
size_t numInputNodes = ort_session->GetInputCount();
size_t numOutputNodes = ort_session->GetOutputCount();
AllocatorWithDefaultOptions allocator;
for (int i = 0; i < numInputNodes; i++)
{
input_names.push_back(ort_session->GetInputName(i, allocator));
Ort::TypeInfo input_type_info = ort_session->GetInputTypeInfo(i);
auto input_tensor_info = input_type_info.GetTensorTypeAndShapeInfo();
auto input_dims = input_tensor_info.GetShape();
input_node_dims.push_back(input_dims);
}
for (int i = 0; i < numOutputNodes; i++)
{
output_names.push_back(ort_session->GetOutputName(i, allocator));
Ort::TypeInfo output_type_info = ort_session->GetOutputTypeInfo(i);
auto output_tensor_info = output_type_info.GetTensorTypeAndShapeInfo();
auto output_dims = output_tensor_info.GetShape();
output_node_dims.push_back(output_dims);
}
this->inpHeight = input_node_dims[0][2];
this->inpWidth = input_node_dims[0][3];
this->edge_size = input_node_dims[0][3];
const int len = this->ntri * 3;
this->triangles = new int[len];
FILE* fp = fopen("triangles.bin", "rb");
fread(triangles, sizeof(int), len, fp);//导入数据
fclose(fp);//关闭文件。
}
Face_Mesh::~Face_Mesh()
{
delete[] triangles;
triangles = NULL;
}
void Face_Mesh::normalize_(vector imgs)
{
const int imgnum = imgs.size();
const int img_area = this->inpHeight * this->inpWidth;
this->input_image_.resize(imgnum * img_area * 3); 也可以用opencv里的merge函数
for (int n = 0; n < imgnum; n++)
{
for (int c = 0; c < 3; c++)
{
for (int i = 0; i < this->inpHeight; i++)
{
for (int j = 0; j < this->inpWidth; j++)
{
float pix = imgs[n].ptr(i)[j * 3 + c];
this->input_image_[n * img_area * 3 + c * img_area + i * this->inpWidth + j] = pix; /// n, h, w, c
}
}
}
}
}
void Face_Mesh::detect(Mat& frame, vector faces)
{
vector inputs;
vector iMs;
for (int i = 0; i < faces.size(); i++)
{
const float trans_distance = float(this->edge_size) * 0.5;
const float maximum_edge = float(max(faces[i].x2 - faces[i].x1, faces[i].y2 - faces[i].y1)) * 2.7;
const float scale = this->edge_size * 2.0 / maximum_edge;
const float cx = trans_distance - scale * float(faces[i].x2 + faces[i].x1) * 0.5;
const float cy = trans_distance - scale * float(faces[i].y2 + faces[i].y1) * 0.5;
vector M = { scale, 0, cx, 0, scale, cy };
Mat warp_mat(2, 3, CV_32FC1, M.data());
Mat cropped;
Size outSize(this->inpWidth, this->inpHeight);
warpAffine(frame, cropped, warp_mat, outSize);
Mat rgb;
cvtColor(cropped, rgb, COLOR_BGR2RGB);
rgb.convertTo(rgb, CV_32FC3);
normalize(rgb, rgb, -1, 1, NORM_MINMAX);
inputs.push_back(rgb);
Mat iM;
invertAffineTransform(warp_mat, iM);
iMs.push_back(iM);
}
if (inputs.size() > 0)
{
this->normalize_(inputs);
array input_shape_{ inputs.size(), 3, this->inpHeight, this->inpWidth };
auto allocator_info = MemoryInfo::CreateCpu(OrtDeviceAllocator, OrtMemTypeCPU);
Value input_tensor_ = Value::CreateTensor(allocator_info, input_image_.data(), input_image_.size(), input_shape_.data(), input_shape_.size());
// 开始推理
vector ort_outputs = ort_session->Run(RunOptions{ nullptr }, &input_names[0], &input_tensor_, 1, output_names.data(), output_names.size()); // 开始推理
auto camera_matrixes_dims = ort_outputs.at(0).GetTensorTypeAndShapeInfo().GetShape();
const int camera_matrixes_h = camera_matrixes_dims.at(1);
const int camera_matrixes_w = camera_matrixes_dims.at(2);
auto landmarks_dims = ort_outputs.at(1).GetTensorTypeAndShapeInfo().GetShape();
const int landmarks_h = landmarks_dims.at(1);
const int landmarks_w = landmarks_dims.at(2);
const int num_faces = iMs.size();
float* camera_matrixes = ort_outputs[0].GetTensorMutableData();
float* landmarks = ort_outputs[1].GetTensorMutableData();
vector Rs(num_faces);
if (mode == "pose" || mode == "sparse")
{
vector< vector> faces_points(num_faces);
for (int i = 0; i < num_faces; i++)
{
Mat R(camera_matrixes_h, camera_matrixes_w, CV_32FC1, camera_matrixes + i * camera_matrixes_h * camera_matrixes_w);
vector points(landmarks_h);
for (int j = 0; j < landmarks_h; j++)
{
float* plandmark = landmarks + i * landmarks_h * landmarks_w + j * landmarks_w;
const float x = plandmark[0] * iMs[i].ptr(0)[0] + iMs[i].ptr(0)[2];
const float y = plandmark[1] * iMs[i].ptr(0)[0] + iMs[i].ptr(1)[2];
points[j] = Point2f(x, y);
}
faces_points[i] = points;
Rs[i] = R;
}
if (mode == "sparse")
{
sparse(frame, faces_points, Rs, Scalar(224, 255, 255));
}
else
{
pose(frame, faces_points, Rs, Scalar(224, 255, 255));
}
}
else
{
if (mode == "dense")
{
vector< vector> faces_points(num_faces);
for (int i = 0; i < num_faces; i++)
{
Mat R(camera_matrixes_h, camera_matrixes_w, CV_32FC1, camera_matrixes + i * camera_matrixes_h * camera_matrixes_w);
vector points(landmarks_h);
for (int j = 0; j < landmarks_h; j++)
{
float* plandmark = landmarks + i * landmarks_h * landmarks_w + j * landmarks_w;
const float x = plandmark[0] * iMs[i].ptr(0)[0] + iMs[i].ptr(0)[2];
const float y = plandmark[1] * iMs[i].ptr(0)[0] + iMs[i].ptr(1)[2];
const float z = plandmark[2] * iMs[i].ptr(0)[0];
points[j] = Point3f(x, y, z);
}
faces_points[i] = points;
Rs[i] = R;
}
dense(frame, faces_points, Rs, Scalar(224, 255, 255));
}
else
{
float* faces_points = new float[num_faces * landmarks_h * 3];
for (int i = 0; i < num_faces; i++)
{
for (int j = 0; j < landmarks_h; j++)
{
float* plandmark = landmarks + i * landmarks_h * landmarks_w + j * landmarks_w;
faces_points[i * landmarks_h * 3 + j * 3] = plandmark[0] * iMs[i].ptr(0)[0] + iMs[i].ptr(0)[2];
faces_points[i * landmarks_h * 3 + j * 3 + 1] = plandmark[1] * iMs[i].ptr(0)[0] + iMs[i].ptr(1)[2];
faces_points[i * landmarks_h * 3 + j * 3 + 2] = plandmark[2] * iMs[i].ptr(0)[0];
}
}
mesh(frame, faces_points, num_faces, landmarks_h, this->triangles, this->ntri);
delete[] faces_points;
faces_points = NULL;
}
}
}
}
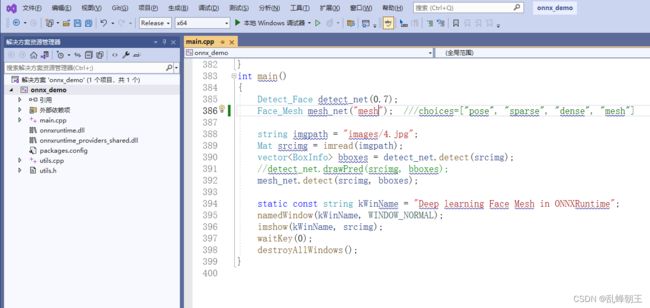
int main()
{
Detect_Face detect_net(0.7);
Face_Mesh mesh_net("mesh"); ///choices=["pose", "sparse", "dense", "mesh"]
string imgpath = "images/4.jpg";
Mat srcimg = imread(imgpath);
vector bboxes = detect_net.detect(srcimg);
//detect_net.drawPred(srcimg, bboxes);
mesh_net.detect(srcimg, bboxes);
static const string kWinName = "Deep learning Face Mesh in ONNXRuntime";
namedWindow(kWinName, WINDOW_NORMAL);
imshow(kWinName, srcimg);
waitKey(0);
destroyAllWindows();
}
下载
源码下载