day2 ARM基础
@
.text
.globl _start
_start:
mov r0,#0
mov r1,#0
addfunc:
add r0,r0,#1 @r0自增1
adds r1,r1,r0 @R1实现1~100累加
cmp r0,#100 @ 判断r0是否到100
bleq loop @r0等于100 进入死循环
blne addfunc @r0等于100跳转至循环累加
loop:
b loop
stop:
b stop
.end【汇编工程创建】
1.汇编工程的创建步骤
参考汇编环境搭建PDF
2.汇编工程的编译

3.配置编辑器编码为UTF-8

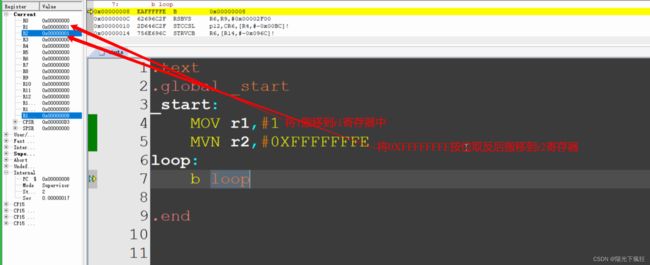
4.示例汇编代码分析
.text @声明当前内容为文本段内容 .global _start @声明_start的内容为全局内容 _start: mov r1,#1 @将1保存在r1寄存器 loop: b loop @程序跳转到loop标签 .end @程序结束
5.程序的调试


map.lds文件是一个链接脚本文件 链接脚本的作用:当程序在编译的最后一个阶段-链接阶段中按照链接脚本的规定,链接不同的文件生成可执行文件

OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm") /*指定输出elf格式的适用于32位机器的镜像,镜像内部的数据按照小端存储方式 */ OUTPUT_ARCH(arm)/*生成的镜像架构是ARM架构的 */ ENTRY(_start)/* 程序执行的入口是_start*/ SECTIONS /* 内部指定了不同内容在内存中的存储位置*/ { . = 0x00000000; /*当前程序起始地址为0X0*/ . = ALIGN(4);/*程序中的指令遵循4字节对齐*/ .text : /*指定文本段的存储地址*/ { ./Objects/start.o(.text) /*将start.o的内容放在文本段最开始*/ *(.text)/*其他的文件保存位置由链接器自己决定*/ } . = ALIGN(4); .rodata : /*规定只读代码段的存储规则*/ { *(.rodata) } . = ALIGN(4); .data : { *(.data) } . = ALIGN(4); __bss_start = .; /*指定.bss段的起始位置*/ .bss : { *(.bss) } __bss_end__ = .;/* 指定.data段的起始位置*/ }
【汇编语言的相关语法】
1.汇编文件中的内容
1.伪操作:在汇编程序中不占用存储空间,但是可以在程序编译时起到引导和标识作用 .text .global .glbal .if .else .endif .data .word.... 2.汇编指令:每一条汇编指令都用来标识一个机器码,让计算机做一个指令运算 数据处理指令 数据搬移指令 算数运算指令 数据移位指令 位运算指令 数据比较指令 跳转指令 内存读写指令 状态寄存器传送指令 CPSR 软中断指令 3.伪指令:不是汇编指令,但是也可以让处理器做一些数据处理,通常一条伪指令会由多条汇编指令联合实现 4.注释 单行注释: @ ; 多行注释: /* */ 条件注释 .if 1/0 指令段1 .else 指令段2 .endif
2.汇编指令的基本语法格式
指令的基本格式:
 【汇编的指令】
【汇编的指令】
1.数据搬移指令
1.1 基本格式
1.2 示例
 2. 立即数的概念
2. 立即数的概念
2.1 概念
定义:可以直接当作指令的一部分去执行的数据叫做立即数。立即数是通过一个0-255之间的数字循环右移偶数位获取
循环右移:低位移除,补到高位
2.2 立即数的判断
如何判断一个数据是不是立即数: 只要让这个数据或者这个数据按位取反的值循环右移偶数位,能够得到一个0-255范围内的数字就说明这个数是立即数 ex: 1. 0X104-> 0000 0000 0000 0000 0000 0001 0000 0100 0X104循环右移两位-》00 0000 0000 0000 0000 0000 0001 0000 01->0x41 0X41是一个0-255范围内的数据 0x104是0X41循环右移30位得到的数据,所以,0X104是立即数 2.0x101-> 0000 0000 0000 0000 0000 0001 0000 0001 0X101找不到一个0-255范围内的数字寻魂右移偶数位得到它,所以它不是立即数 3.0XFFFFFFFE ->1111 1111 1111 1111 1111 1111 1111 1110 0XFFFFFFFE也找不到0-255范围内的数字循环右移偶数位得到它,但是它的取反值0X1是一个立即数,所以0XFFFFFFFE也是一个立即数
2.3 如何将一个非立即数保存在寄存器中
利用伪指令ldr即可完成非立即数的操作 格式: ldr 目标寄存器名,=数据

3.移位操作指令
3.1 指令格式以及指令码
格式:
3.2 示例
.text .global _start _start: mov r0,#0XFF lsl r1,r0,#4 @0XFF左移四位结果保存到r1 0XFF0 lsr r2,r0,#4 @0XFF右移移四位结果保存到r2 0XF ror r3,r0,#4 @0XFF循环右移四位结果保存到r3 0XF000000F loop: b loop .end
 4.位运算指令
4.位运算指令
4.1 相关指令功能以及规则
与、或、异或、按位清0
与:与0清0 与1不变
| 初值 |
运算值 |
结果 |
| 1 |
0 |
0 |
| 1 |
1 |
1 |
| 0 |
1 |
0 |
| 0 |
0 |
0 |
或:或1置1 或0不变
| 初值 |
运算值 |
结果 |
| 1 |
0 |
1 |
| 1 |
1 |
1 |
| 0 |
1 |
1 |
| 0 |
0 |
0 |
异或:相同为0,不同为1
| 初值 |
运算值 |
结果 |
| 1 |
0 |
1 |
| 1 |
1 |
0 |
| 0 |
1 |
1 |
| 1 |
1 |
0 |
按位清0:想要哪位清0,只需要和1进行运算即可
| 初值 |
运算值 |
结果 |
| 1 |
1 |
0 |
| 0 |
1 |
0 |
| 1 |
0 |
1 |
| 0 |
0 |
0 |
4.2 位运算指令码以及格式
格式:
4.3 示例
.text .global _start _start: mov r0,#0XFF and r1,r0,#(~(0X1<<4)) @第四位清0 0xEF orr r2,r0,#(0X1<<9) @第9位置1 0X2FF eor r3,r0,#0XF @0xf0 bic r4,r0,#(0X1<<4)@第四位清0 0xEF loop: b loop .end

4.4 练习
LDR R0,=0X12345678 @在r1里存放0X12345678 1.将R0寄存器第4位清0,其他位不变 and r0,r0,#(~(0X1<<4))) 或者 bic r0,r0,#(0X1<<4) 2.将R0寄存器第7位置1,其他位不变 orr r0,r0,#(0X1<<7) 3.将R0寄存器第[31:28]位清0,其他位不变 and r0,r0,#(~(0Xf<<28))) 或者 bic r0,r0,#(0Xf<<28) 4.将R0寄存器第[7:4]位置1,其他位不变 orr r0,r0,#(0XF<<4) 5.将R0寄存器第[15:11]位设置为10101,其他位不变 思想:想要将一个数据的哪几位设置为不同的数值,先将这几位清0,在给上指定的位数 先将[15:11]清0:bic r0,r0,#(0X1f<<11) 在给[15:11]设置为10101:orr r0,r0,#(0X15<<11)
5.算数运算指令
5.1 指令码以及格式
格式:
5.2 示例代码
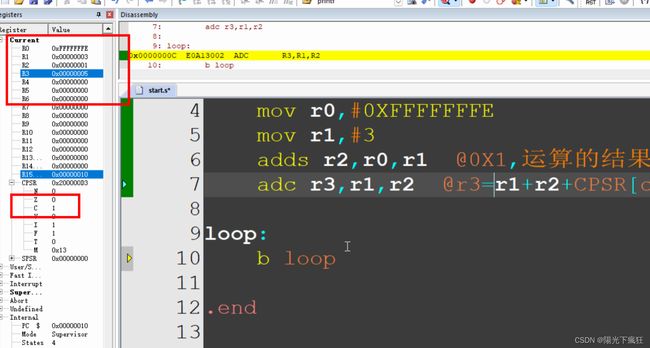
加法
.text .global _start _start: mov r0,#0XFFFFFFFE mov r1,#3 adds r2,r0,r1 @0X1,运算的结果影响到条件位 adc r3,r1,r2 @r3=r1+r2+CPSR[c] loop: b loop .end
减法:
.text .global _start _start: mov r0,#0XFFFFFFFE mov r1,#3 subs r2,r1,r0 @减法不借位,c位置1,借位,c位清0 mov r3,#6 sbc r4,r3,r1 @r4=r3-r1-!CPSR[c] loop: b loop .end

5.3 进行64位算数运算
思想:让低32位和高32位进行分别运算,每一个64位的数高32位和低32位数值保存在两个寄存器中
MOV R1,#0xfffffffe @第一个数据的低32位 mov r2,#0x00000004 @第一个数据的高32位 MOV R3,#0x00000005 @第二个数据的低32位 mov r4,#0x00000004 @第二个数据的高32位 加法: 低32位: adds r5,r1,r3 高32位: adc r6,r2,r4 减法: 低32位: subs r5,r3,r1 高32位: sbc r6,r4,r2
6.数据比较指令
6.1 语法
格式: cmp

6.2 示例
.text .global _start _start: MOV R1,#4 MOV R2,#4 CMP R1,R2 addeq r3,r1,r2 @if(r1==r2) r3=r1+r2 subne r4,r1,r2 @if(r1!==r2) r4=r1-r2 loop: b loop .end
7.跳转指令
一般实现程序的跳转有两种方式:
1.直接修改PC的值 2.通过跳转指令 跳转指令:
1.b label 解释:跳转到label标签所在代码,此时跳转,lr寄存器不保存返回地址
ex:
.text .global _start
_start: MOV R1,#4
MOV R2,#4
CMP R1,R2
beq addfunc
bne subfunc
addfunc:
add r3,r1,r2
b loop
subfunc: sub r4,r1,r2 @if(r1!==r2) r4=r1-r2 b loop loop: b loop .end
2. bl label 解释:跳转到label标签所在代码,此时跳转,lr寄存器保存返回地址 ex: .text .global _start _start: MOV R1,#4 MOV R2,#4 CMP R1,R2 bleq addfunc blne subfunc addfunc: add r3,r1,r2 mov pc,lr @程序返回 subfunc: sub r4,r1,r2 @if(r1!==r2) r4=r1-r2 mov pc,lr @程序返回 loop: b loop .end
3. bx 地址 跳转到地址对应的的指令位置,此时跳转LR不保存返回地址 .text .global _start _start: MOV R1,#4 MOV R2,#4 MOV R3,#4 MOV R4,#4 MOV R5,#4 MOV R6,#4 bx r3 @跳转到地址为4的指令位置 loop: b loop .end 4.blx 地址 跳转到地址对应的的指令位置,此时跳转LR保存返回地址 .text .global _start _start: MOV R1,#4 MOV R2,#4 MOV R3,#4 MOV R4,#4 MOV R5,#4 blx r3 @跳转到地址为4的指令位置 MOV R6,#4 loop: b loop .end
任务
1.复习今日内容
2.实现1-100,累加