六维空间向量表示法公式笔记
六维空间向量表示法目录
-
- 1、运动和力
- 2、空间速度和空间力
- 3、加法运算和模乘
- 4、点积(内积)
- 5、坐标变换
- 6、叉积(向量积,外积)
- 7、微分
- 8、加速度
- 9、空间动量
- 10、空间惯量
- 11、空间运动方程
目前对机器人动力学还没有一套标准的表示法,比如有3D向量、齐次矩阵、六维空间向量等。其中最有效的是六维空间向量( Spatial Vector Notation),本文是我看《Handbook of robotics》的笔记,其中看起来弯弯曲曲的字母 v f v f vf表示3维向量,看起来直直的v f 表示六维空间向量。
1、运动和力
为了区分刚体的运动(motion)和施加在刚体上的力(force),分别用运动六维向量空间 M 6 M^6 M6和力六维向量空间 F 6 F^6 F6来表示。两个空间及其各自的基向量如下图所示
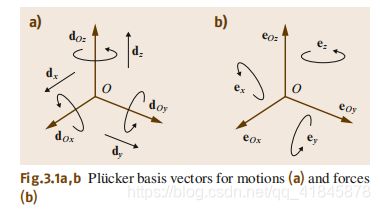
两个空间共有12个基向量,6个用来描述运动,6个用来描述力。
在运动六维空间,对于一个坐标系 O x y z O_{xyz} Oxyz,三个描述分别绕坐标轴 O x O_x Ox, O y O_y Oy, O z O_z Oz进行旋转的基向量 d O x d_{Ox} dOx, d O y d_{Oy} dOy, d O z d_{Oz} dOz;三个描述分别沿着坐标轴 O x O_x Ox, O y O_y Oy, O z O_z Oz进行平移的基向量 d x d_{x} dx, d y d_{y} dy, d z d_{z} dz。
在力六维空间,对于一个坐标系 O x y z O_{xyz} Oxyz,三个描述分别绕坐标轴 O x O_x Ox, O y O_y Oy, O z O_z Oz进行旋转的基向量 e O x e_{Ox} eOx, e O y e_{Oy} eOy, e O z e_{Oz} eOz;三个描述分别沿着坐标轴 O x O_x Ox, O y O_y Oy, O z O_z Oz进行平移的基向量 e x e_{x} ex, e y e_{y} ey, e z e_{z} ez。
2、空间速度和空间力
任意给定一个参考点 O O O,刚体的速度可以用一对3维向量来表示:沿三个轴的线速度 v = ( v O x , v O y , v O z ) v=(v_{Ox},v_{Oy},v_{Oz}) v=(vOx,vOy,vOz)、绕三个轴旋转的角速度 w = ( w x , w y , w z ) w=(w_x,w_y,w_z) w=(wx,wy,wz)。那么该运动的六维空间表示法为

相应的其普吕克坐标表示为

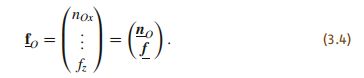
关于力是相似的。刚体受到力 f f f和扭矩 n O n_O nO的作用,则该受力情况的六维空间向量表示法为

相应的其普吕克坐标表示为
3、加法运算和模乘
如果刚体同时受到两个力f 1 _1 1和f 2 _2 2的作用,那么这两个力的合力为f 1 _1 1+f 2 _2 2;
如果刚体1的速度为v 1 _1 1,刚体2的速度为v 2 _2 2,那么刚体2相对于刚体1的运动速度为v 2 _2 2-v 1 _1 1;
如果刚体受到力f 1 _1 1的作用,其大小为1N,那个 α α αf 1 _1 1表示在该方向上大小为 α α αN的力。
4、点积(内积)
六维空间向量的点积定义为该物体的运动m∈M 6 ^6 6和力f∈F 6 ^6 6的点积——f·m或者m·f。
m·m和f·f是无定义的。
如果m和f是用同一坐标系来表示的,那么m·f=m T ^T Tf。
5、坐标变换
定义 A A A和 B B B是两个坐标系,在 A A A坐标系下的运动和力分别表示为m A _A A和f A _A A;在 B B B坐标系下的运动和力分别表示为m B _B B和f B _B B。
那么从 A A A坐标系下的运动变换到 B B B坐标系下的方程为
![]()
相应的力的变换为
![]()
其中 B X A ^BX_A BXA和 B X A F ^BX_A^F BXAF分别是从坐标系 A A A到坐标系 B B B的运动变换矩阵和力变换矩阵。并且二者满足如下关系,也就是从力变换矩阵到运动变换矩阵的变换(或者反过来)是先求逆再转置(求逆和转置可交换)。
![]()
假设坐标系 A A A相对于坐标系 B B B的位置向量为 B p A ^Bp_A BpA,旋转变换矩阵为 B R A ^BR_A BRA,那么 B X A ^BX_A BXA可以表示为
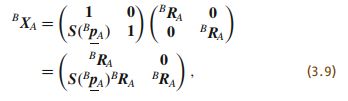
其逆矩阵为

其中 S ( p ) S(p) S(p)为 p p p的斜对称矩阵

6、叉积(向量积,外积)
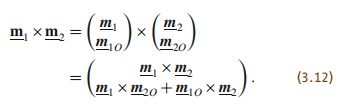
六维空间向量的叉积有两种形式,一种是运动和运动做叉积
第二种是运动和力做叉积

在此定义一个叉积算子

所以运动和运动的叉积表示为m 1 _1 1×m 2 _2 2=S(m 1 _1 1)m 2 _2 2
但是运动和力的叉积表示为m×f= - S(m) T ^T Tf
可见S(m)将运动向量映射为运动向量,S(m) T ^T T将力向量映射为力向量。
7、微分
六维空间向量的微分定义为

对于一个运动的坐标系 A A A,任意的六维空间向量s,该空间向量的微分表示为

且

8、加速度
六维空间向量的加速度和经典的刚体的加速度是不一样的。
![]()
上式中,左式为空间向量的加速度,右式为经典的刚体加速度,两者之间存在如下关系
![]()
如果r是某一个刚体相对于任意一个固定点的位置向量,那么存在如下关系

上式中,第一个式子是刚体的速度,第二个式子是刚体的经典加速度,第三个式子是刚体在向量空间的加速度,可见式子(3.21)依然是成立的。
如果刚体 B 1 B_1 B1和刚体 B 2 B_2 B2的速度分别是v 1 _1 1和v 2 _2 2,刚体 B 1 B_1 B1相对于刚体 B 2 B_2 B2的速度为v r e l rel rel,那么v 2 _2 2=v 1 _1 1+v r e l _{rel} rel
他们之间的加速度满足如下关系

9、空间动量
假设一个刚体的质量为 m m m,质心为C,绕过C的直线的转动惯量为 I c m I^{cm} Icm。如果刚体的空间速度为v c = ( w T v c T ) T _c=(w^Tv_c^T)^T c=(wTvcT)T,那么
线动量为 h = m v c h=mv_c h=mvc
角动量为 h C = I c m w h_C=I^{cm}w hC=Icmw
该刚体绕着某一个点 O O O的动量为 h O = h C + c × h h_O=h_C+c×h hO=hC+c×h,其中, c = O C ⃗ c=\vec{OC} c=OC,即存在如下关系
10、空间惯量
刚体的空间动量是其空间惯量和速度的点积h= I v Iv Iv。
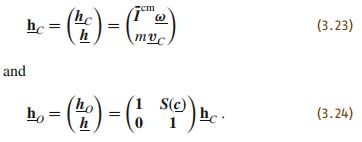
用在C处的普吕克坐标来表示为
![]()
其中,

上式是对一个质心在C处的刚体的空间惯量的一般表示方式。
但是对于另一点O来说,该刚体的动量表示为
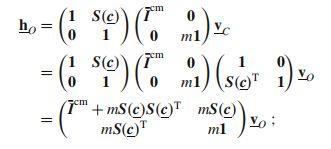
但是该式仍然满足h C _C C= I C v C I_Cv_C ICvC的形式,所以可得

我们继而写成如下形式
![]()
其中,
![]()
空间惯量矩阵是对称矩阵,也是正定矩阵。要表示空间惯量矩阵需要21个变量,但是刚体的惯量矩阵实际上只有10个参数:质量(1)、质心坐标(3)、 I O I_O IO或者 I c m I^{cm} Icm的六个独立参数(6)。
对于不同的坐标系 A A A和 B B B,惯量矩阵之间的变换矩阵为
![]()
故而下式也成立。
![]()
如果两个刚体的惯量分别是 I 1 I_1 I1和 i 2 i_2 i2,务必注意他俩相对于同一个旋转轴,那么总惯量为 I t o t = I 1 + I 2 I_{tot}=I_1+I_2 Itot=I1+I2,
其动能为

11、空间运动方程
刚体的受力等于其动量的变化率,故而
![]()
再故而
![]()