基于STM32F103C8T6的端口重映射及定时器输出PWM控制
#一、端口重映射原理及部分/完全重映射
#二、端口重映射的配置
#三、PWM控制
##1、通用定时器输出PWM
##2、PWM的工作原理
##3、PWM的内部运作机制
##4、PWM的模式
##5、自动加载的预载寄存器
#四、定时器输出PWM结构体及库函数的配置
#五、项目硬件
#六、项目代码
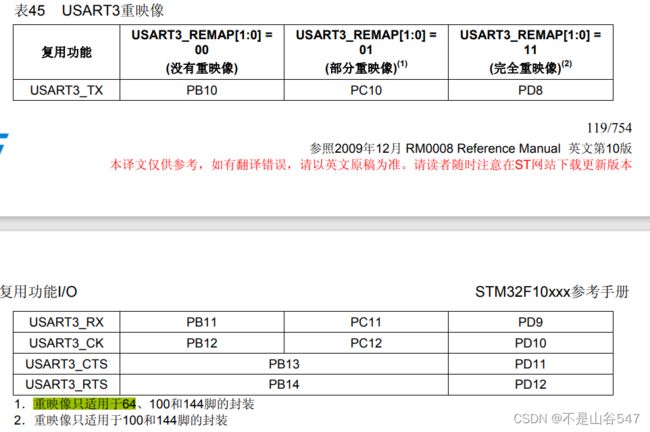
一、端口重映射原理及部分/完全重映射
每个外设都有若干个输入输出引脚,一般这些引脚也都不是固定不变的,但为了让开发工程师更好的安排引脚的功能和走向,引入了重映射的功能。也就是一个外设的引脚除了具有默认的端口外,也还可以设置重映寄存器来把这个外设映射到其他GPIO端口。方便硬件工程师布线,减少干扰。

部分重映射:
功能外设的部分引脚重新映射,还有一部分引脚是原来的默认引脚,简言之,外设的功能不止能在默认引脚使用,还可以在其他引脚使用。
完全重映射:
功能外设的所有引脚都是重新映射。
二、端口重映射的配置
1.使能GPIO引脚(重映射后的GPIO引脚)
2.使能功能外设
3.使能AFIO时钟,重映射必须使能AFIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
4.开启重映射:
void GPIO_PinRemapConfig(uint32_t GPIO_Remap,FunctionalState NewState);
三、PWM控制
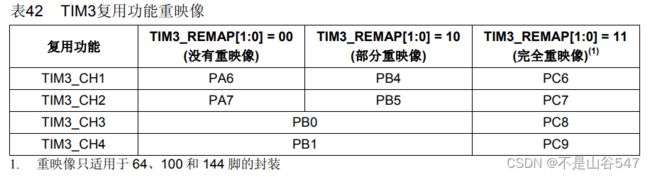
1、通用定时器输出PWM
以TIM3为例,STM32的通用定时器分为TIM2、TIM3、TIM4、TIM5,每个定时器都有独立的四个通道可以用来作为:输入捕获,输出比较,PWM输出,单脉冲模式输出等。
STM32的定时器除了TIM6和TIM7(基本定时器)之外,其他的定时器都可以产生PWM波输出,高级定时器TIM1,TIM8可以同时产生7路PWM输出,而通用定时器可以同时产生4路PWM输出,这样STM32可以最多同时输出30路PWM输出。
2、PWM的工作原理
以向上计数为例,讲述PWM原理:
1.在PWM输出模式下除了CNT(计数器当值),ARR(自动重装载值),CCRx(捕获/比较寄存器值)
2.在CNT小于CCRx时,TIMx_CHx通道输出低电平
3.在CNT大于或等于CCRx时,TIM_CHx通道输出高电平
所谓脉宽调制信号(PWM波),就是一个TIMx_ARR自动重装载寄存器确定频率(由它决定pWM周期),TIM_CCRx寄存器确定占空比信号。

3、PWM的内部运作原理
CCR1:设置捕获比较器寄存器,设置比较值
CCMR1:设置PWM模式1或者PWM模式2
CCER:
P位:输出/捕获:设置极性:0高电平有效,1低电平有效
E位:输出/捕获:使能串口

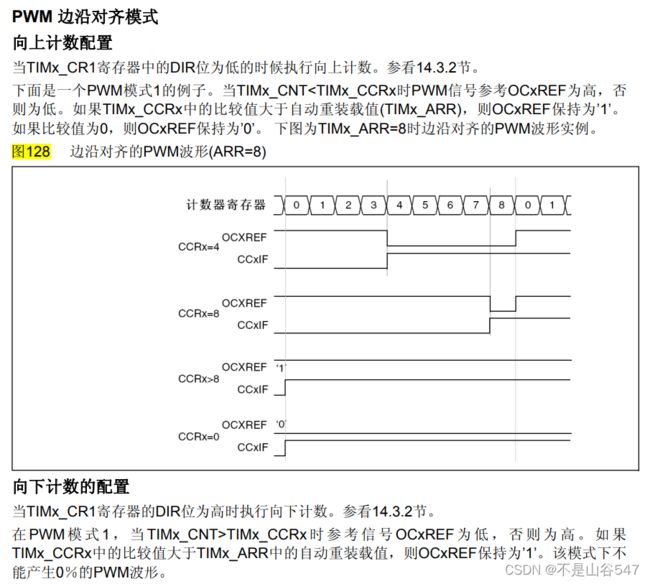
4、PWM的模式
1)模式一:边沿对齐模式
向上计数时:当TIMx_CNT
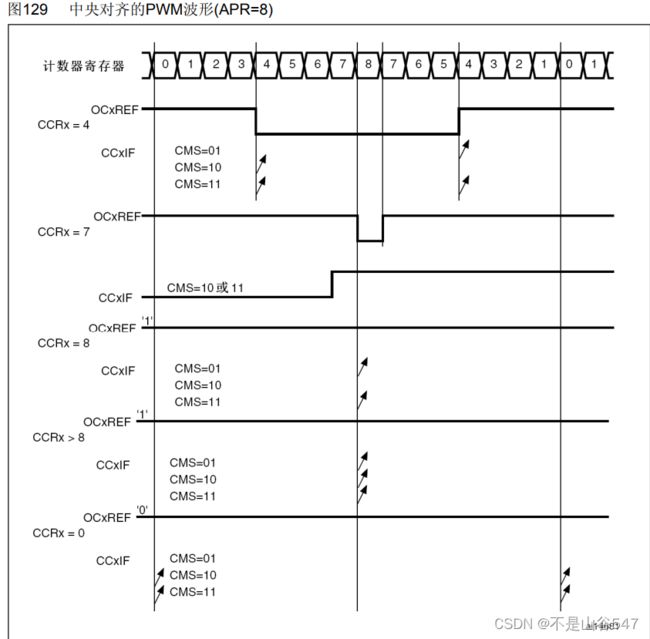
2)模式二:中央对齐模式
向上计数时:当TIMx_CNT
5、自动加载的预加载寄存器
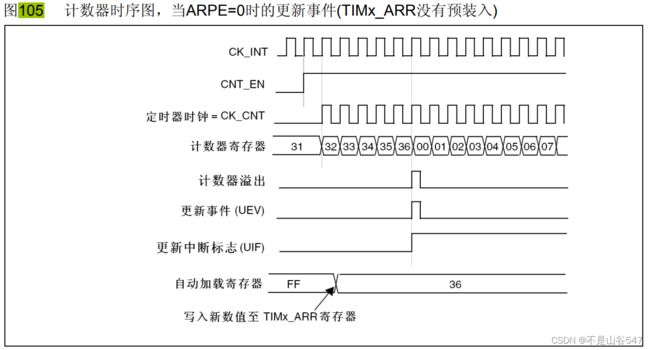
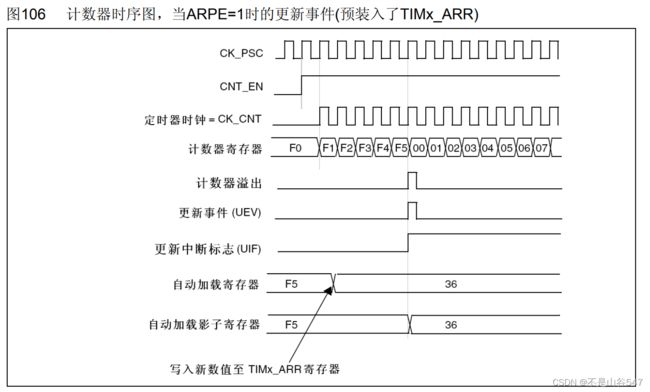
APER=1,ARR立即生效
APER=2,ARR下个周期生效
void TIM_ARRPreloadConfig(TIM_TypeDef * TIMx,FunctionalState NewState);
四、定时器输出PWM结构体及库函数的配置
1)打开时钟:GPIO时钟、TIM定时器时钟、部分重映射时钟
2)配置GPIO结构体
3)配置通用定时器结构体
4)配置定时输出PWM结构体
5)在主函数中配置PWM比较值
五、项目硬件
SG90电机(舵机)
硬件接线:
红线:3.3V/5V
黑线:GND
黄线:信号线

六、项目代码
motor.c
#include "stm32f10x.h"
#include "motor.h"
void motor_config(void)
{
GPIO_InitTypeDef GPIO_Motorinit;//配置GPIO结构体初始化
TIM_TimeBaseInitTypeDef TIM_Motorinit;//配置定时器结构体初始化
TIM_OCInitTypeDef TIMPWM_Motorinit;//配置舵机定时器结构体初始化
//1.打开时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//配置GPIO时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//配置定时器时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//配置引脚复用时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);//配置重映射模式为部分重映射
//2.配置GPIO结构
GPIO_Motorinit.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出
GPIO_Motorinit.GPIO_Pin = GPIO_Pin_5;//pin口配置为5
GPIO_Motorinit.GPIO_Speed = GPIO_Speed_50MHz;//速度配置为50Mhz
GPIO_Init(GPIOB,&GPIO_Motorinit);//配置GPIO初始化函数
//3.配置通用定时器结构体
TIM_Motorinit.TIM_ClockDivision = TIM_CKD_DIV1;//设置时钟不分频
TIM_Motorinit.TIM_CounterMode = TIM_CounterMode_Up;//设置计数方式为向上计数
TIM_Motorinit.TIM_Period = 200-1;//设置在下一个更新事件装入活动的自动重装载值为199
TIM_Motorinit.TIM_Prescaler = 7200-1;//TIM时钟频率预分频值为7199
TIM_TimeBaseInit(TIM3,&TIM_Motorinit); //配置定时器初始化函数
//4.配置定时去输出PWM结构体
TIMPWM_Motorinit.TIM_OCMode = TIM_OCMode_PWM1;//配置PWM定时器模式为1
TIMPWM_Motorinit.TIM_OutputState = TIM_OutputState_Enable;//使能PWM比较输出
TIMPWM_Motorinit.TIM_OCPolarity = TIM_OCNPolarity_Low;//选择有效输出的极性
TIM_OC2Init(TIM3,&TIMPWM_Motorinit);//配置初始化函数
TIM_Cmd(TIM3,ENABLE);//使能PWM输出
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);//自动加载的预装载寄存器使能
}
motor.h
#include "stm32f10x.h"
void motor_config(void);
main.c
#include "stm32f10x.h"
#include "main.h"
#include "LED.h"
#include "usart.h"
#include "relay.h"
#include "shake.h"
#include "exti.h"
#include "tim.h"
#include "motor.h"
void delay(uint16_t time)//延迟函数
{
uint16_t i=0;
while(time--)
{
i=12000;
while(i--);
}
}
int main()
{
uint16_t pwmval=155;//定义变量pwmval
usart_init();//串口初始化
tim_config();//定时器初始化
LED_Init();//LED初始化
motor_config();//PWM初始化
while(1)
{
for(pwmval=195;pwmval>=175;pwmval=-5)
{
TIM_SetCompare2(TIM3,pwmval);
delay(500);
}
}
}
usart.c(串口)
#include "stm32f10x.h"
#include "usart.h"
#include usart.h
#include "stm32f10x.h"
#include