8.STM32F103freeRTOS---信号量
文章目录
- 前言
- 一、创建二值信号量
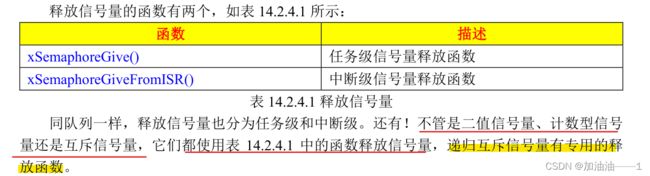
- 二、释放信号量
- 三、获取信号量
- 四、二值信号量操作实验
- 实验遇到的问题:
前言
信号量常用于控制对共享资源的访问和任务同步。
信号量说的直白一点就是:计数器。
比如我们去一个公共电话,我们知道电话的两种状态:使用和未使用状态。如果用电话的两个状态作为信号量的话,那么这个就是二值信号量。
信号量用于控制共享资源访问的场景相当于一个上锁机制,代码只有获得了这个锁的钥匙才能够执行。
信号量还有一个重要的运用场合就是任务同步,用于任务于任务或中断于任务之间的同步。
一、创建二值信号量



注意:二值信号量是基于队列的基础实现的,这个队列的长度为1,队列项长度为0.这个队列是没有存储区的队列,是通过使用队列是否为空来表示二值信号量。
新版本的的二值信号量创建函数创建的二值信号量默认是无效的。
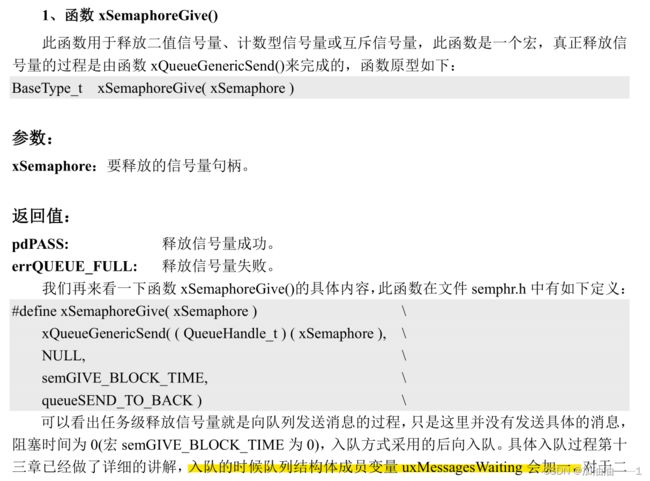
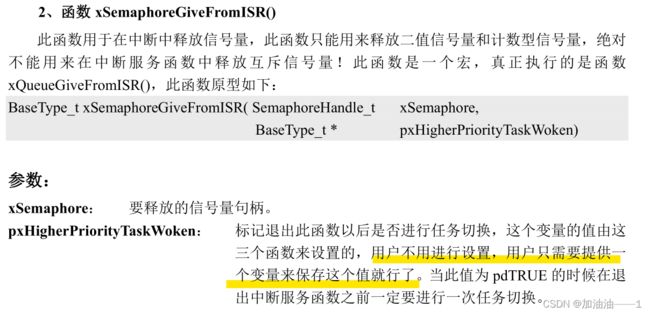
二、释放信号量

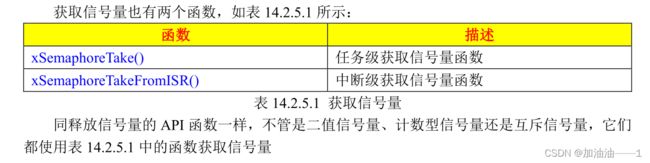
三、获取信号量

四、二值信号量操作实验
本实验是利用串口接收数据产生中断,从而产生释放一个二值信号量,这个二值信号量由一个任务去获取。若没有这个二值信号量,就代表串口没有接收到消息,没有触发串口接收中断。在接收二值信号量的任务中获取二值信号量的方式是:阻塞一个最大时间,如果超过这个规定阻塞时间,则该任务让出CPU的控制权。
【注意:由于串口中断里面运用到了freeRTOS的API,所以串口中断的抢占优先级的值需要大于5,我是把他设置为7.】
代码具体如下:
main.c
#include "sys.h"
#include "usart.h"
#include "led.h"
#include "delay.h"
#include "FreeRTOS.h"
#include "semphr.h"//信号量的头文件
#include "task.h"
/*
本次实验通过二值信号来完成中断程序与任务之间的同步。
我们设计一个:通过串口发送指定的指令来控制开发板上的LED1 和 LED2的开关实验。
串口发送: 1 -> led1on
2 -> led1off
3 -> led2on
4 -> led2off
这些指令通过串口发送给开发板,开发板使用中断接收,
当接收到数据以后就释放二值信号,任务DataProcess_task
用来处理这些指令,改任务会一直获取二值信号量,当获取到信号量就
会从串口接收缓冲区中提取这些指令,然后根据指令控制相应的外设。
*/
#define start_task_size 52
#define start_task_pro 1
TaskHandle_t startTask_handler;
void start_task(void *pram);
#define task1_size 256
#define task1_pro 2
TaskHandle_t Task1_handler;
void task1(void *pram);
#define DataPrecess_size 256
#define DataPrecess_pro 3
TaskHandle_t DataPrecess_handler;
void DataPrecess_task(void *pram);
//extern uint8_t RxBuff[128];
extern uint8_t Rx;
//uint8_t CommendPrecess(char * str);
//信号量句柄
SemaphoreHandle_t TaskToIrqSemaphore;
//SemaphoreHandle_t TaskToTaskSemaphore;
int main(void)
{
delay_init(); //延时函数初始化
uart_init(115200); //初始化串口
LED_Init(); //初始化LED
xTaskCreate(
(TaskFunction_t )start_task,
(const char * ) "start_task",
(uint16_t )start_task_size ,
(void * )NULL,
(UBaseType_t ) start_task_pro,
(TaskHandle_t * )startTask_handler );
vTaskStartScheduler();//开始任务调度
}
/*88888888888888888888888888888888888888888888888888888888888888888888*/
void start_task(void *pram)
{
//BaseType_t Return;
taskENTER_CRITICAL();
TaskToIrqSemaphore = xSemaphoreCreateBinary();//创建二值信号量
xTaskCreate(
(TaskFunction_t ) task1,
(const char * ) "task1",
(uint16_t ) task1_size ,
(void * ) NULL,
(UBaseType_t ) task1_pro,
(TaskHandle_t * ) Task1_handler);
xTaskCreate(
(TaskFunction_t ) DataPrecess_task,
(const char * ) "DataPrecess_task",
(uint16_t ) DataPrecess_size,
(void * ) NULL,
(UBaseType_t ) DataPrecess_pro,
(TaskHandle_t * ) DataPrecess_handler);
vTaskDelete(NULL);
taskEXIT_CRITICAL();
}
void task1(void *pram)
{
printf("this is task1\r\n");
while(1)
{
LED1 = !LED1;
vTaskDelay(1000);
}
}
void DataPrecess_task(void *pram)
{
while(1)
{
if(TaskToIrqSemaphore != NULL)
{
if( xSemaphoreTake(TaskToIrqSemaphore,portMAX_DELAY) == pdTRUE) //获取信号量成功
{
printf("Rx=%c\n",Rx);
switch(Rx)
{
case '1':LED2_ON();break;
case '2':LED2_OFF();break;
case '3':LED3_ON();break;
case '4':LED3_OFF();break;
}
}
else if(xSemaphoreTake(TaskToIrqSemaphore,portMAX_DELAY) == pdFALSE)
{
printf("taske2 seqfalt\r\n");
vTaskDelay(10);
}
}
}
}
/*
命令处理函数,将字符串转化为命令值
uint8_t CommendPrecess(char * str)
{
uint8_t commendVaul = commendERR;
if(strcmp((char *)str,"led1on\r\n" )== 0)
{
commendVaul = 1;
}
else if(strcmp((char *)str,"led1off") == 0)
{
commendVaul = 2;
}
else if(strcmp((char *)str,"led2on" )== 0)
{
commendVaul = 3;
}
else if(strcmp((char *)str,"led2off") == 0)
{
commendVaul = 4;
}
return commendVaul;
}
*/
uasrt.c
#include "sys.h"
#include "usart.h"
#include "led.h"
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "FreeRTOS.h" //FreeRTOS使用
#include "semphr.h"//信号量的头文件
#endif
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
uint8_t Rx ;
extern SemaphoreHandle_t TaskToIrqSemaphore;
BaseType_t *pxHigherPriorityTaskWoken ;
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4); //设置系统中断优先级分组4 ,串口1中断
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=7 ;//抢占优先级3,仅仅对于这个信号量实验,抢占优先级设置为7
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
void USART1_IRQHandler(void) //串口1中断服务程序
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Rx = USART_ReceiveData(USART1); //读取接收到的数据
xSemaphoreGiveFromISR(TaskToIrqSemaphore,pxHigherPriorityTaskWoken);
}
portYIELD_FROM_ISR(pxHigherPriorityTaskWoken);
}
usart.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h"
void uart_init(u32 bound);
#endif
实验遇到的问题:
(1)刚开始本来是想用一个字符串来控制的,但是出现了乱码以及控制不了的问题,所以听了大佬的意见,简单化,用一个字符来控制。