16 Linux 内核定时器
一、Linux 时间管理和内核定时器简介
1. 内核时间管理简介
Linux 内核中有大量的函数需要时间管理,比如周期性的调度程序、延时程序、定时器等。
硬件定时器提供时钟源,时钟源的频率可以设置,设置好以后就周期性的产生定时中断,系统使用定时中断来计时。中断周期性产生的频率就是系统频率,也叫做节拍率(tick rate) 。
系统节拍率是可以设置的,单位是 Hz,我们在编译 Linux 内核的时候可以通过图形化界面设置系统节拍率,按照如下路径打开配置界面:
-> Kernel Features
-> Timer frequency ( [=y]) 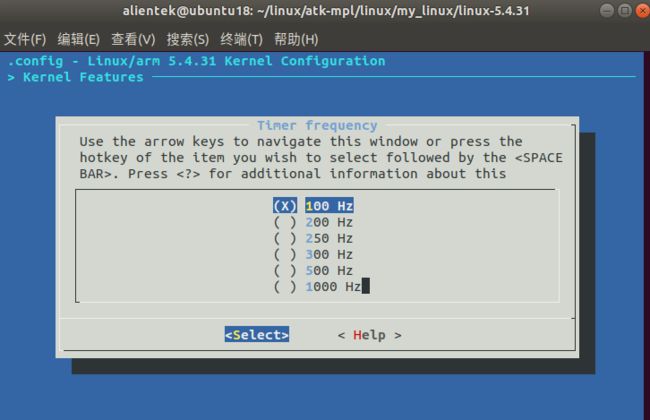
可选的系统节拍率为 100Hz、 200Hz、 250Hz、 300Hz、 500Hz 和 1000Hz,默认情况下选择 100Hz。设置好以后打开 Linux 内核源码根目录下的.config 文件,红框框出来的就是系统节拍率:

其实这里的 CONFIG_HZ 是被宏定义为 #define HZ CONFIG_HZ,所以这里 HZ 为 100,这里的 HZ 其实代表的就是一秒的节拍数,也就是频率。
有这么多的节拍率为什么选择 100Hz 的呢? 这里引出高节拍率和低节拍率的优缺点:
① 高节拍会提高系统的时间精度,如果采用 100 Hz,时间精度就是 10ms,如果采用 1000Hz,时间精度就是 1ms。对于时间严格的函数来说,使用高节拍会提高精度。
② 虽然高节拍能提高精度,但是也会使中断产生更加频繁,频繁的增加中断会家中系统的负担。就比如,100Hz 和 1000 Hz 来说,系统就要多花费 10 陪的“精力”去处理中断。但现在普遍的处理器性能都很强,所以采用 1000Hz 都不会有太大的压力。
Linux 内核使用全局变量 jiffies 来记录系统从启动以来的系统节拍数,系统启动的时候会将 jiffies 初始化为 0 :
extern u64 __cacheline_aligned_in_smp jiffies_64; // 64位的jiffies_64
extern unsigned long volatile __cacheline_aligned_in_smp __jiffy_arch_data jiffies; // unsigned long类型的32位jiffies
// 64位的jiffies应用在64位系统上,32位的就在32位的系统上,这是为了兼容不同的硬件HZ 表示每秒的节拍数, jiffies 表示系统运行的 jiffies 节拍数,所以 jiffies/HZ 就是系统运行时间,单位为秒。不管是 32 位还是 64 位的 jiffies,都有溢出的风险,溢出以后会重新从 0 开始计数,相当于绕回来了,这相当于绕回。假如 HZ 为最大值 1000 的时候, 32 位的 jiffies 只需要 49.7 天就发生了绕回,对于 64 位的 jiffies 来说大概需要 5.8 亿年才能绕回,所以 64 位的 jiffies 忽略不计。那处理 32 位的 jiffies 就比较重要,Linux 提供 API 函数来处理绕回:

如果 unkown 超过 known,time_after 函数返回真,否则返回假。如果 unkown 没有超过 known 的话 time_before 函数返回真,否则返回假。time_after_eq 函数和 time_after 函数类似,只是多了判断等于这个条件。time_before_eq也类似。
/*
比如我们要判断代码执行时间是不是超过了2s,那么超过的时间点就是jiffies + (2 * HZ),
如果jiffies大于timeout,那就表示超时,否则没有超时。
*/
unsigned long timeout;
timeout = jiffies + (2 * HZ); /* 超时的时间点 */
/*************************************
具体的代码
************************************/
/* 判断有没有超时 */
if(time_before(jiffies, timeout))
{
/* 超时未发生 */
}
else
{
/* 超时发生 */
}Linux 内核也提供了几个 jiffies 和 ms、us、ns 之间的转换函树:

2. 内核定时器简介
一般周期性的工作都是用到了定时器,Linux 内核定时器采用系统时钟来实现。Linux 内核定时器只要给出超时时间(定时值)和定时器处理函数。当超时时间到了,设置的定时函数就会执行。需要注意的是,内核定时器不是周期性的,它是运行完就自动关闭,如果想要周期性运行定时器,那么需要在定时处理函数中重新开启定时器。timer_list 结构体成员如下:
struct timer_list {
/*
* All fields that change during normal runtime grouped to the
* same cacheline
*/
struct hlist_node entry;
unsigned long expires; /* 定时器超时时间,单位是节拍数 */
void (*function)(struct timer_list *);/* 定时处理函数*/
u32 flags; /* 标志位 */
#ifdef CONFIG_LOCKDEP
struct lockdep_map lockdep_map;
#endif
};Linux 内核使用 timer_list 结构体表示内核定时器,使用内核定时器前需要定义一个 timer_list 结构体变量。
比如我们现在需要定义一个周期为 2 秒的定时器,那么这个定时器的超时时间就是 jiffies+(2*HZ),因此 expires=jiffies+(2*HZ)。function 就是定时器超时以后的定时处理函数,我们要做的工作就放到这个函数里面,需要我们编写这个定时处理函数, function 函数的形参就是我们定义的 timer_list 变量。
定义好超时时间和定时处理函数后,还需要有一系列 API 函数来初始化定时器:
① timer_setup 函数
当我们定义了一个 timer_list 变量以后一定要先用 timer_setup 初始化一下。
/*
* @description : 初始化 timer_list 类型变量
* @param - timer : 要初始化定时器
* @param - func : 定时器的回调函数,此函数的形参是当前定时器的变量
* @param - flags : 标志位,直接给 0
* @return : 没有返回值
*/
void timer_setup(struct timer_list *timer, void (*func)(struct timer_list *), unsigned int flags);② add_timer 函数
/*
* @description : 向 Linux 内核注册定时器,注册完成后定时器就会开始运行
* @param - timer : 要注册的定时器
* @return : 没有返回值
*/
void add_timer(struct timer_list *timer);③ del_timer 函数
/*
* @description : 用于删除一个定时器,不管定时器是否是激活,都可以用此函数删除。
* @description : 在多处理器系统上,定时器可能会在其他的处理器上运行,因此在调用 del_timer 函数删除定时器之前要先等待其他处理器的定时处理器函数退出
* @param - timer : 要删除的定时器
* @return : 0,定时器还没被激活; 1,定时器已经激活
*/
int del_timer(struct timer_list * timer);④ del_timer_sync 函数
/*
* @description : del_timer 函数的同步版,这个函数会等待其他处理器使用完定时器再删除,并且不能使用在中断上下文中
* @param - timer : 要删除的定时器
* @return : 0,定时器还没被激活; 1,定时器已经激活
*/
int del_timer_sync(struct timer_list *timer);⑤ mod_timer 函数
/*
* @description : 用于修改定时值,如果定时器还没有激活的话,函数会激活定时器
* @param - timer : 要修改超时时间(定时值)的定时器
* @param - expires : 修改后的超时时间
* @return : 0,调用 mod_timer 函数前定时器未被激活; 1,调用 mod_timer 函数前定时器已被激活
*/
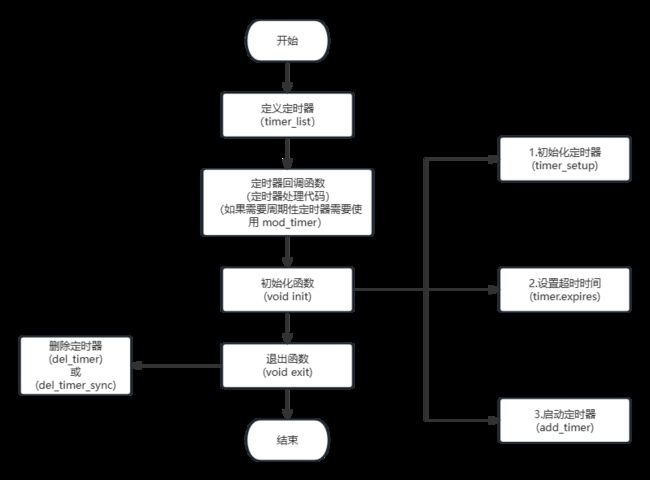
int mod_timer(struct timer_list *timer, unsigned long expires);内核定时器一般使用流程如下:
struct timer_list timer; /* 定义定时器 */
/* 定时器回调函数 */
void function(struct timer_list *arg)
{
/*
* 定时器处理代码
*/
/* 如果需要定时器周期性运行的话就使用 mod_timer
* 函数重新设置超时值并且启动定时器。
*/
mod_timer(&dev->timertest, jiffies + msecs_to_jiffies(2000));
}
/* 初始化函数 */
void init(void)
{
timer_setup(&timerdev.timer, timer_function, 0); /* 初始化定时器 */
timer.expires=jffies + msecs_to_jiffies(2000);/* 超时时间 2 秒 */
add_timer(&timer); /* 启动定时器 */
}
/* 退出函数 */
void exit(void)
{
del_timer(&timer); /* 删除定时器 */
/* 或者使用 */
del_timer_sync(&timer);
}使用流程图如下:
3. Linux 内核短延时函数
有时候我们需要在内核中实现短延时。 Linux 内核提供了毫秒、微秒和纳秒延时函数:

二、实验程序编写
这次实验用 LED 和 定时器配合来实现亮灭操作。
由于是使用内核定时器自带的 API 函数,所以不用修改设备树。LED 设备树之前章节就修改好了。
首先在 /linux/atk-mpl/Drivers 目录下创建子目录 12_tiemr,并创建好 Vscode 工作区和 timer.c,并向 timer.c 加入以下代码:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define TIMER_CNT 1 /* 设备号个数 */
#define TIMER_NAME "timer" /* 名字 */
#define CLOSE_CMD (_IO(0XEF, 0x1)) /* 关闭定时器 */
#define OPEN_CMD (_IO(0XEF, 0x2)) /* 打开定时器 */
#define SETPERIOD_CMD (_IO(0XEF, 0x3)) /* 设置定时器周期命令 */
#define LEDON 1 /* 开灯 */
#define LEDOFF 0 /* 关灯 */
/* timer设备结构体 */
struct timer_dev{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
int led_gpio; /* key所使用的GPIO编号 */
int timeperiod; /* 定时周期,单位为ms */
struct timer_list timer;/* 定义一个定时器*/
spinlock_t lock; /* 定义自旋锁 */
};
struct timer_dev timerdev; /* timer设备 */
/*
* @description : 初始化LED灯IO,open函数打开驱动的时候
* 初始化LED灯所使用的GPIO引脚。
* @param : 无
* @return : 无
*/
static int led_init(void)
{
int ret;
const char *str;
/* 设置LED所使用的GPIO */
/* 1、获取设备节点:timerdev */
timerdev.nd = of_find_node_by_path("/gpioled");
if(timerdev.nd == NULL) {
printk("timerdev node not find!\r\n");
return -EINVAL;
}
/* 2.读取status属性 */
ret = of_property_read_string(timerdev.nd, "status", &str);
if(ret < 0)
return -EINVAL;
if (strcmp(str, "okay"))
return -EINVAL;
/* 3、获取compatible属性值并进行匹配 */
ret = of_property_read_string(timerdev.nd, "compatible", &str);
if(ret < 0) {
printk("timerdev: Failed to get compatible property\n");
return -EINVAL;
}
if (strcmp(str, "alientek,led")) {
printk("timerdev: Compatible match failed\n");
return -EINVAL;
}
/* 4、 获取设备树中的gpio属性,得到led-gpio所使用的led编号 */
timerdev.led_gpio = of_get_named_gpio(timerdev.nd, "led-gpio", 0);
if(timerdev.led_gpio < 0) {
printk("can't get led-gpio");
return -EINVAL;
}
printk("led-gpio num = %d\r\n", timerdev.led_gpio);
/* 5.向gpio子系统申请使用GPIO */
ret = gpio_request(timerdev.led_gpio, "led");
if (ret) {
printk(KERN_ERR "timerdev: Failed to request led-gpio\n");
return ret;
}
/* 6、设置PI0为输出,并且输出高电平,默认关闭LED灯 */
ret = gpio_direction_output(timerdev.led_gpio, 1);
if(ret < 0) {
printk("can't set gpio!\r\n");
return ret;
}
return 0;
}
/*
* @description : 打开设备
* @param - inode : 传递给驱动的inode
* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量
* 一般在open的时候将private_data指向设备结构体。
* @return : 0 成功;其他 失败
*/
static int timer_open(struct inode *inode, struct file *filp)
{
int ret = 0;
filp->private_data = &timerdev; /* 设置私有数据 */
timerdev.timeperiod = 1000; /* 默认周期为1s */
ret = led_init(); /* 初始化LED IO */
if (ret < 0) {
return ret;
}
return 0;
}
/*
* @description : ioctl函数,
* @param - filp : 要打开的设备文件(文件描述符)
* @param - cmd : 应用程序发送过来的命令
* @param - arg : 参数
* @return : 0 成功;其他 失败
*/
static long timer_unlocked_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
struct timer_dev *dev = (struct timer_dev *)filp->private_data;
int timerperiod;
unsigned long flags;
switch (cmd) {
case CLOSE_CMD: /* 关闭定时器 */
del_timer_sync(&dev->timer); // 等待其他处理器用完定时器删除
break;
case OPEN_CMD: /* 打开定时器 */
spin_lock_irqsave(&dev->lock, flags); // 这里用了自旋锁的保存中断状态,禁止本地中断,并获取自旋锁。
timerperiod = dev->timeperiod;
spin_unlock_irqrestore(&dev->lock, flags); // 释放锁,把中断状态恢复到以前的状态,并且
mod_timer(&dev->timer, jiffies + msecs_to_jiffies(timerperiod)); // mod_timer就是用来让内核定时器有周期性
// msecs_to_jiffies 函数则是将毫秒转换为 jiffies 的函数宏
break;
case SETPERIOD_CMD: /* 设置定时器周期 */
spin_lock_irqsave(&dev->lock, flags);
dev->timeperiod = arg;
spin_unlock_irqrestore(&dev->lock, flags);
mod_timer(&dev->timer, jiffies + msecs_to_jiffies(arg));
break;
default:
break;
}
return 0;
}
/*
* @description : 关闭/释放设备
* @param - filp : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
static int led_release(struct inode *inode, struct file *filp)
{
struct timer_dev *dev = filp->private_data;
gpio_set_value(dev->led_gpio, 1); /* APP结束的时候关闭LED */
gpio_free(dev->led_gpio); /* 释放LED */
del_timer_sync(&dev->timer); /* 关闭定时器 */
return 0;
}
/* 设备操作函数 */
static struct file_operations timer_fops = {
.owner = THIS_MODULE,
.open = timer_open,
.unlocked_ioctl = timer_unlocked_ioctl,
.release = led_release,
};
/* 定时器回调函数 */
void timer_function(struct timer_list *arg)
{
/* from_timer是个宏,可以根据结构体的成员地址,获取到这个结构体的首地址。
作用:在定时器回调函数中通过回调函数的参数获取所属结构体的指针
第一个参数表示结构体,第二个参数表示第一个参数里的一个成员,第三个参数表示第二个参数的类型,得到第一个参数的首地址。
*/
struct timer_dev *dev = from_timer(dev, arg, timer);
static int sta = 1;
int timerperiod;
unsigned long flags;
sta = !sta; /* 每次都取反,实现LED灯反转 */
gpio_set_value(dev->led_gpio, sta);
/* 重启定时器 ,这里最大的作用就是更新定时器触发时间 */
spin_lock_irqsave(&dev->lock, flags);
timerperiod = dev->timeperiod;
spin_unlock_irqrestore(&dev->lock, flags);
mod_timer(&dev->timer, jiffies + msecs_to_jiffies(dev->timeperiod));
}
/*
* @description : 驱动入口函数
* @param : 无
* @return : 无
*/
static int __init timer_init(void)
{
int ret;
/* 初始化自旋锁 */
spin_lock_init(&timerdev.lock);
/* 注册字符设备驱动 */
/* 1、创建设备号 */
if (timerdev.major) { /* 定义了设备号 */
timerdev.devid = MKDEV(timerdev.major, 0);
ret = register_chrdev_region(timerdev.devid, TIMER_CNT, TIMER_NAME);
if(ret < 0) {
pr_err("cannot register %s char driver [ret=%d]\n", TIMER_NAME, TIMER_CNT);
return -EIO;
}
} else { /* 没有定义设备号 */
ret = alloc_chrdev_region(&timerdev.devid, 0, TIMER_CNT, TIMER_NAME); /* 申请设备号 */
if(ret < 0) {
pr_err("%s Couldn't alloc_chrdev_region, ret=%d\r\n", TIMER_NAME, ret);
return -EIO;
}
timerdev.major = MAJOR(timerdev.devid); /* 获取分配号的主设备号 */
timerdev.minor = MINOR(timerdev.devid); /* 获取分配号的次设备号 */
}
printk("timerdev major=%d,minor=%d\r\n",timerdev.major, timerdev.minor);
/* 2、初始化cdev */
timerdev.cdev.owner = THIS_MODULE;
cdev_init(&timerdev.cdev, &timer_fops);
/* 3、添加一个cdev */
cdev_add(&timerdev.cdev, timerdev.devid, TIMER_CNT);
if(ret < 0)
goto del_unregister;
/* 4、创建类 */
timerdev.class = class_create(THIS_MODULE, TIMER_NAME);
if (IS_ERR(timerdev.class)) {
goto del_cdev;
}
/* 5、创建设备 */
timerdev.device = device_create(timerdev.class, NULL, timerdev.devid, NULL, TIMER_NAME);
if (IS_ERR(timerdev.device)) {
goto destroy_class;
}
/* 6、初始化timer,设置定时器处理函数,还未设置周期,所有不会激活定时器 */
timer_setup(&timerdev.timer, timer_function, 0);
return 0;
destroy_class:
device_destroy(timerdev.class, timerdev.devid);
del_cdev:
cdev_del(&timerdev.cdev);
del_unregister:
unregister_chrdev_region(timerdev.devid, TIMER_CNT);
return -EIO;
}
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static void __exit timer_exit(void)
{
del_timer_sync(&timerdev.timer); /* 删除timer */
#if 0
del_timer(&timerdev.tiemr);
#endif
/* 注销字符设备驱动 */
cdev_del(&timerdev.cdev);/* 删除cdev */
unregister_chrdev_region(timerdev.devid, TIMER_CNT); /* 注销设备号 */
device_destroy(timerdev.class, timerdev.devid);
class_destroy(timerdev.class);
}
module_init(timer_init);
module_exit(timer_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y"); ioctl 函数是设备的I/O通道进行管理的函数,也就是对设备的一些特性进行控制。
函数 timer_unlocked_ioctl,对应应用程序的 ioctl 函数,应用程序调用 ioctl 函数向驱动发送控制信息,此函数响应并执行。timer_unlocked_ioctl 函数有三个参数,分别是:filp、cmd 和 arg,其中 filp 对应的设备文件,cmd 对应的应用程序发过来的命令信息,arg 是应用程序发过来的参数,这次实验的 arg 参数定义为定时周期。
最开始宏定义定义了三个命令:
CLOSE_CMD:关闭定时器命令, 调用 del_timer_sync 函数关闭定时器。
OPEN_CMD:打开定时器命令,调用 mod_timer 函数打开定时器,定时周期为 timerdev 的 timeperiod 成员变量,定时周期默认是 1 秒。
SETPERIOD_CMD:设置定时器周期命令,参数 arg 就是新的定时周期,设置 timerdev 的 timeperiod 成员变量为 arg 所表示定时周期值。并且使用 mod_timer 重新打开定时器,使定时器以新的周期运行。
关于 timer_function 里的 from_timer,这里是根据 arg 参数反推出 timerdev 变量地址,from_timer 是一个宏,作用是给定结构体中的某个成员变量的地址、该结构体类型和该成员的名字来得到这个成员所在结构体变量的首地址。比如 timerdev 这个结构体变量,类型为 timer_dev,而 timer_dev 中有个成员变量 timer, timer 是 timer_list 类型。因此当我们知道了 timer 这个成员变量的具体地址以后,就可以根据 from_timer 宏定义来反推出 timer 这个成员变量所属的 timer_dev 结构体变量首地址,在这里就是得到 timerdev 地址。一句话总结,获得结构体中的结构体首地址。
编写 timerApp.c 函数,它需要实现的功能是:
① 运行 APP 以后提示我们输入要测试的命令,输入 1 表示关闭定时器、输入 2 表示打开定时器,输入 3 设置定时器周期。
② 如果要设置定时器周期的话,需要让用户输入要设置的周期值,单位为毫秒。
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include
/* 命令值 */
#define CLOSE_CMD (_IO(0XEF, 0x1)) /* 关闭定时器 */
#define OPEN_CMD (_IO(0XEF, 0x2)) /* 打开定时器 */
#define SETPERIOD_CMD (_IO(0XEF, 0x3)) /* 设置定时器周期命令 */
/*
* @description : main主程序
* @param - argc : argv数组元素个数
* @param - argv : 具体参数
* @return : 0 成功;其他 失败
*/
int main(int argc, char *argv[])
{
int fd, ret;
char *filename;
unsigned int cmd;
unsigned int arg;
unsigned char str[100];
if (argc != 2) {
printf("Error Usage!\r\n");
return -1;
}
filename = argv[1];
fd = open(filename, O_RDWR);
if (fd < 0) {
printf("Can't open file %s\r\n", filename);
return -1;
}
while (1) {
printf("Input CMD:");
ret = scanf("%d", &cmd);
if (ret != 1) { /* 参数输入错误 */
fgets(str, sizeof(str), stdin); /* 防止卡死 */ // fgets一次读取一行数据,它保证每次读取的数据都是以换行符结尾的完整行,避免了数据的不完整和分割问题
}
if(4 == cmd) /* 退出APP */
goto out;
if(cmd == 1) /* 关闭LED灯 */
cmd = CLOSE_CMD;
else if(cmd == 2) /* 打开LED灯 */
cmd = OPEN_CMD;
else if(cmd == 3) {
cmd = SETPERIOD_CMD; /* 设置周期值 */
printf("Input Timer Period:");
ret = scanf("%d", &arg);
if (ret != 1) { /* 参数输入错误 */
fgets(str, sizeof(str), stdin); /* 防止卡死 */
}
}
ioctl(fd, cmd, arg); /* 控制定时器的打开和关闭 */
}
out:
close(fd);
} 三、运行测试
编写 Makefile 文件:
KERNELDIR := /home/zuozhongkai/linux/atk-mp1/linux/my_linux/linux-5.4.31
CURRENT_PATH := $(shell pwd)
obj-m := timer.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean编译 timer.c 和 timerApp.c 文件:
make
arm-none-linux-gnueabihf-gcc timerApp.c -o timerApp把编译好的 timer.ko 和 timerApp 复制:
sudo cp timerApp timer.ko /home/alientek/linux/nfs/rootfs/lib/modules/5.4.31/ -f开启开发板,进入 lib/modules/5.4.31/ 目录下,输入命令:
depmod # 第一次使用需要加载驱动程序
modprobe timer.ko # 加载驱动程序现在开始测试驱动程序:
./timerApp /dev/timer
# 后面可以输入2(每1s闪一次),3(设置周期后开始按着周期闪)
这里输入 3 后,再输入 200,这里的循环点灯时间为 0.2s。退出应用程序按 CTRL + C。
最后卸载驱动:
rmmod timer.ko总结
这里跟以往都有一定的区别。
程序中:
① 这里没有了 read 和 write,新增加了 timer_unlocked_ioctl 函数,它用于处理设备的特殊控制命令,根据 cmd 的值来确定执行哪个特定的设备命令,并针对不同的命令执行相应的操作。
② 新增了定时器回调函数(viod timer_function),这个函数是使用到定时器就要有的函数,这个函数主要包含了需要实现的功能及重启定时器等。
③ led_init 函数跟上一次的按键 key_init 类似,都是把关于类似的 GPIO 初始化的一些操作放在了 init 函数里,并把这个函数放在 open 函数里。之前是把 led_init 函数里的内容放在了驱动入口函数里,最大的区别在于现在每一次打开设备的时候都会初始化设备,但是如果放在驱动入口函数则是在加载驱动函数(modprobe)的时候,初始化一次。
概念:
这里学习了高节拍和低节拍的区别,并且学习了内核定时器的使用,使用流程必须掌握。