主线剧情01-ARM-IMX6ULL基础学习记录
ARM & i.MX6ULL 基础学习记录
编辑整理 by Staok
本文大部分内容摘自“100ask imx6ull”开发板的配套资料(如《IMX6ULL裸机开发完全手册》等等),侵删。进行了精髓提取,方便日后查阅。过于基础的内容不会在此提及。如有错误恭谢指出!
注:在 Github 上的原版文章日后可能会更新,但这里不会跟进。文章的 Gitee 仓库地址,Gitee 访问更流畅。
目录
目录
目录
ARM & i.MX6ULL 基础学习记录
目录
ARM & Linux 相关
cpsr 寄存器详情
大小端模式
汇编程序调用 C 程序详情
imx6ull 裸机编程相关
裸机映像文件合成详情
重定位、启动和编译
100ASK IMX6ULL Flashing Tool 工具使用
异常与GIC介绍
ARM异常处理 & 启动文件的示例
ARM & Linux 相关
p.s 汇编基本指令和 ARM 的汇编启动代码看 “ARM异常处理 及其模板” 文件夹里的 startup.s 文件。
cpsr 寄存器详情
运行模式
Cortex-A7架构的运行模式有9种。运行模式可以通过软件进行任意切换,也可以通过中断或者异常来进行切换。大多数的程序都运行在用户模式,用户模式下是不能访问系统所有资源的,有些资源是受限的,要想访问这些受限的资源就必须进行模式切换。但是用户模式是不能直接进行切换的,用户模式下需要借助异常来完成模式切换,当要切换模式的时候,应用程序可以产生异常,在异常的处理过程中完成处理器模式切换。
| 模式 | 描述 |
|---|---|
| User | 用户模式,非特权模式,大部分程序运行的时候就处于此模式 |
| Sys(System) | 系统模式,用于运行特权级的操作系统任务 |
| FIQ | 快速中断模式,进入 FIQ 中断异常 |
| IRQ | 一般中断模式 |
| ABT(Abort) | 数据访问终止模式,用于虚拟存储以及存储保护 |
| SVC(Supervisor) | 超级管理员模式,供操作系统使用 |
| UND(Undef) | 未定义指令终止模式 |
| MON(Monitor) | 用于安全扩展模式 |
| Hyp | 用于虚拟化扩展 |
几点说明:
-
板子上电时,CPU处于SVC模式,它用的是SVC模式下的寄存器。
-
程序运行时发生了中断,CPU进入IRQ模式,它用的IRQ模式下的寄存器。
-
CPU发生某种异常时,比如读取内存出错,它会进入ABT模式,使用ABT模式下的寄存器来处理错误。
每一种模式对应使用的寄存器
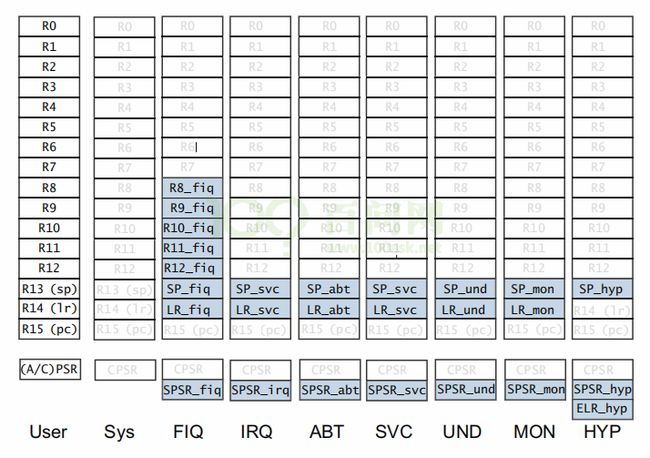
几点说明:
-
如果某个程序处于 FIQ 模式下访问寄存器 R13(SP),那它实际访问的是寄存器 SP_fiq。
-
如果某个程序处于 SVC 模式下访问寄存器 R13(SP),那它实际访问的是寄存器 SP_svc。
-
除了 FIQ 模式,寄存器 R0~R12 都是通用的,即模式之间切换前这些寄存器的值应该保存。
-
假如某个ARM处理器是三级流水线:取指->译码->执行,循环执行,那么程序计数器 R15(PC) = 当前执行指令地址 + 4 * 2 个字节。
-
未定义指令异常的个别用法:在某些系统中,代码可能包含用于协处理器(例如VFP协处理器)的指令,但是系统中不存在相应的VFP硬件。另外,VFP硬件有可能无法处理特定指令,而是想调用软件来对其进行模拟。或者,可能会禁用VFP硬件,采用异常处理,以便可以启用它,然后重新执行指令。使用未定义的指令,可以实现一些仿真器(软件模拟硬件的实现)。比如在你的芯片中,它并未支持某条硬件除法指令,但是你还可以在代码中使用它。当CPU执行这条指令时会发生异常,在异常处理函数中,你用软件来实现该指令的功能。对于不是特别设置的未定义指令,在异常处理函数中不能处理它时,通常做法是记录适当的调试信息,并关掉(kill)对应的应用程序。在某些情况下,未定义指令异常的另一个用途是实现用户断点:调试器(如gdb)去修改代码,替换断点位置的指令为一条未定义指令。
-
SVC异常的个别用法:软中断 swi 指令可以触发此异常,获得 SVC 权限。在Linux中对文件的open/read/write等APP层的系统函数,它的本质都是执行SVC指令,从而进入Linux内核中预设的SVC异常处理函数,在内核里操作文件。可以使用寄存器或者操作码中某个字段将参数传递给SVC处理程序。
程序状态寄存器 cpsr
所有运行模式都共用一个 CPSR 物理存在的寄存器叫 程序状态寄存器,CPSR 可以在任何模式下被访问。当特定异常中断发生时,备份程序状态寄存器 SPSR 用来保存 CPSR 的值,当异常退出以后可以用 SPSR 中保存的值来恢复 CPSR。

各个位的说明:
-
N(bit31):当两个有符号整数(补码表示)运算时,结果用N表示,N=1/0 表示 负数/正数。
-
Z(bit30):对于 CMP 指令,Z=1 表示进行比较的两个数大小相等。
-
C(bit29):
-
在加法指令中,当结果产生了进位,则C=1,表示无符号数运算发生上溢,其它情况下 C=0;
-
在减法指令中,当运算中发生借位,则C=0,表示无符号数运算发生下溢,其它情况下 C=1;
-
对于包含移位操作的非加/减法运算指令,C 中包含最后一次溢出的位的数值;
-
对于其它非加/减运算指令,C 位的值通常不受影响。
-
-
V(bit28):对于加/减法运算指令,当操作数和运算结果表示为二进制的补码表示的带符号数时,V=1 表示符号位溢出,通常其他位不影响 V 位。
-
Q(bit27):仅 ARM v5TE_J 架构支持,表示饱和状态,Q=1/0 表示累积饱和/累积不饱和。
-
IT[1:0] (bit26:25) 和 IT[7:2] (bit15:bit10)一起组成 IT[7:0],作为 IF-THEN 指令执行状态。
-
J(bit24) 和 T(bit5):控制指令执行状态,表明本指令是ARM指令还是Thumb指令。{J,T} = b00 为 ARM;= b01 为 Thumb;= b11 为 ThumbEE;= b10 为 Jazelle。
-
GE[3:0] (bit19:16):SIMD(单指令多数据,处理器为提升并行操作的一种功能) 指令有效,大于或等于。
-
E(bit9):大小端控制位,E=1/0 表示大/小端模式。
-
A(bit8):禁止异步中断位,A=1 表示禁止异步中断。
-
I(bit7):I=1/0 代表 禁止/使能 IRQ。
-
F(bit6):F=1/0 代表 禁止/使能 FIQ。
-
M[4:0]:运行模式控制位,如表
M[4:0] 运行模式 10000 User 模式 10001 FIQ 模式 10010 IRQ 模式 10011 Supervisor(SVC)模式 10110 Monitor(MON)模式 10111 Abort(ABT)模式 11010 Hyp(HYP)模式 11011 Undef(UND)模式 11111 System(SYS)模式
在用户模式下,无法改变处理器模式的M位[4:0]来切换模式和A,I和F位来使能或者禁止异步中止、IRQ和FIQ。
大小端模式
-
大端模式(Big-endian),是指数据的高字节保存在内存的低地址中,而数据的低字节保存在内存的高地址中。
-
小端模式(Little-endian),是指数据的高字节保存在内存的高地址中,而数据的低字节保存在内存的低地址中。
汇编程序调用 C 程序详情
在 C 程序和 ARM 汇编程序之间相互调用时必须遵守 ATPCS 规则,其是基于 ARM 指令集和 THUMB 指令集过程调用的规范,规定了调用函数如何传递参数,被调用函数如何获取参数,以何种方式传递函数返回值。
-
寄存器 R0~R15 在 ATPCS 规则的使用
-
在函数中,通过寄存器 R0~R3 来传递参数,被调用的函数在返回前无需恢复寄存器 R0~R3 的内容。
-
在函数中,通过寄存器 R4~R11 来保存局部变量。
-
寄存器 R12 用作函数间 scratch 寄存器。
-
寄存器 R13 用作栈指针,记作 SP ,在函数中寄存器 R13 不能用做其他用途,寄存器 SP 在进入函数时的值和退出函数时的值必须相等。
-
寄存器 R14 用作链接寄存器,记作 LR ,它用于保存函数的返回地址,如果在函数中保存了返回地址,则 R14 可用作其它的用途。
-
寄存器 R15 是程序计数器,记作 PC ,它不能用作其他用途。
-
-
汇编程序向 C 程序函数传递参数
-
当参数小于等于 4 个时,使用寄存器 R0~R3 来进行参数传递。
-
当参数大于 4 个时,前四个参数按照上面方法传递,剩余参数传送到栈中,入栈的顺序与参数顺序相反,即最后一个参数先入栈。
-
-
C 程序函数返回结果给汇编程序
-
结果为一个 32 位的整数时,通过寄存器 R0 返回。
-
结果为一个 64 位整数时,通过 R0 和 R1 返回,依此类推。
-
结果为一个浮点数时,通过浮点运算部件的寄存器 f0,d0 或 s0 返回。
-
结果为一个复合的浮点数时,通过寄存器 f0-fN 或者 d0~dN 返回。
-
对于位数更多的结果,通过调用内存来传递。
-
-
当 C 程序从一个函数跳转到另一个函数时,会先把源函数的 CPU 的寄存器和函数内的局部变量都入栈,当跳回时再出栈,这一过程的汇编代码是当 C 程序编译成汇编时被编译器自动添加。
imx6ull 裸机编程相关
这里是处理器启动流程等的介绍,属于科普环节,有个印象,会加深对于处理器如何运行的理解,非必要记住,而是为以后的操作说明每一个步骤都在做什么事情。此部分理解为主。
裸机映像文件合成详情
先说原理,看 imx6ull 芯片手册可知,芯片上电时内部的 boot ROM 固化的程序会通过外部引脚确定启动方式(USB\NAND\EMMC\SD等),将应用的二进制数据(app.bin)从存储区(NAND\EMMC\SD等)搬运到内存区(DDR2\3等),然后跳转到内存区的程序处开始执行程序。这个过程是这个芯片自动完成的,但是需要根据规定合成烧录到存储区的映像文件, 在编译得到应用的二进制文件 app.bin(这个就是比如 裸机应用固件 或 Linux 固件等)之后,再用 mkimage 工具(gcc-arm-linux-gnueabihf-6.2.1 编译器自带的)根据 imximage.cfg.cfgtmp 这个文件的信息,合成头部信息,再与 app.bin 组合生成 .imx 文件, .imx 的头部再添加 1KB 的数据(可以全为0,也可包含分区表等数据) 组合生成 .img 文件,具体如下:
-
.imx 文件 = 头部信息( IVT + Boot data + DCD) + app.bin -> 用于在烧写工具中烧写到 EMMC 中,烧写工具会自动将其烧写到 1KB 偏移处。
-
.img 文件 = 1k.bin + .imx 文件 = 1k.bin + 头部信息( IVT + Boot data + DCD) + app.bin -> 用于在烧写工具中烧写到 SD 中,烧写工具会将其烧写到 0 位置处(对与 SD 的烧写,此工具不会自动加 1KB 偏移...)。
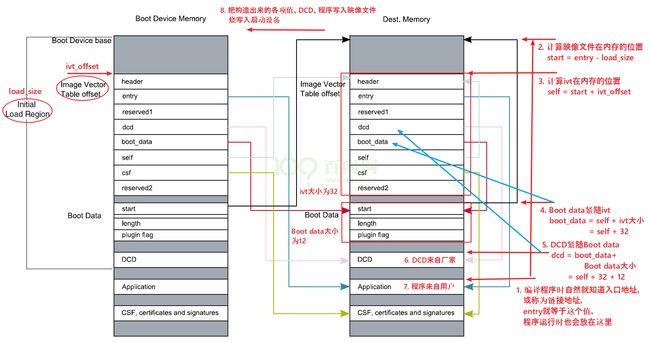
头部信息包含了指示 boot ROM 程序要把 app.bin 数据搬运到内存的何处,其大小,以及包含了配置 DDR 的寄存器、引脚等数据等待,具体如下:
-
IVT:Image vector table,含 header(含 tag、length、version,这 3 项,length 表示 IVT 的大小)、entry(指示 app.bin 在内存中的位置,即程序数据被复制到内存哪里)、dcd(指示 DCD 数据 在内存中的位置)、boot_data(指示 Boot data 在内存中的位置)、self(指示 IVT 在内存中的位置)等,共占 32*8bit 大小,entry 为 app.bin 要在内存中的目的地址。
-
Boot data:start(映像文件在内存中的地址,为 IVT 在内存中的绝对地址减去 1024 偏移)、length(整个映像文件的长度,含 1k.bin)、plugin,共占 32*3bit 大小。
-
DCD:配 imx6ull 芯片的寄存器,如 DDR 的配置等,可自定,复杂,mkimage 根据 imximage.cfg.cfgtmp 这个文件的信息合成。
其中,entry(指示 app.bin 在内存中的位置,即程序数据被复制到内存哪里)的地址在 Makefile 中调用 mkimage 工具时是可以指定的,在"重定位"章节会细说。
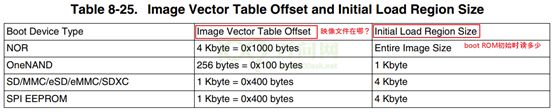
具体分布:
-
头部数据和偏移区使用 mkimage 工具生成,官方都会提供的。
-
最前面的灰色部分就是偏移数据区,对于EMMC/SD存储区设备是 1KB,对于 NAND 是256B,具体看手册。
最终生成的 .img 文件结构:
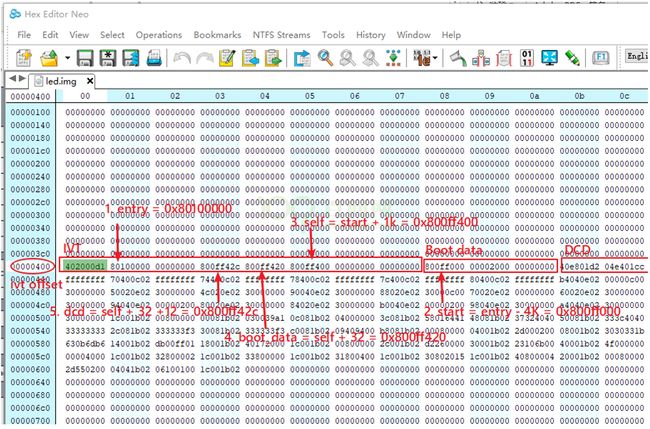
imx6ull 上电启动过程分析:
-
boot Rom 会把 EMMC 或 SD 卡的前 4K 数据(涵盖了头部信息( IVT + Boot data + DCD)这些等)读入到芯片内部 RAM 运行。
-
boot Rom 根据 DCD 进行初始化 DDR。
-
boot Rom 根据 IVT,从 EMMC 或 SD 卡中将 app.bin 读到 DDR 的 0x80100000 地址(IVT 的 entry,如上图所示)。
-
跳转到 DDR 的 0x80100000 地址执行,即 CPU 开始从内存 0x80100000 地址开始执行机器码。
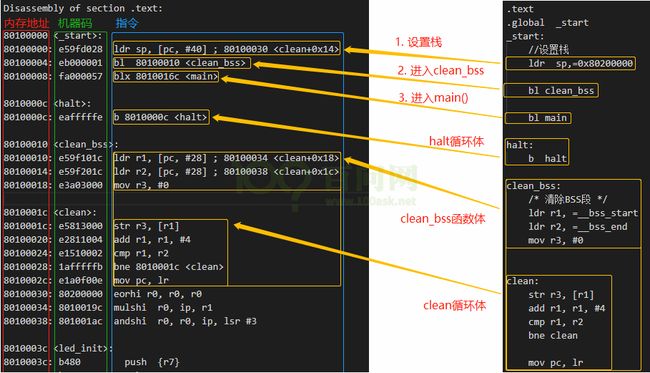
以上步骤执行完之后的 DDR 内存图示:(这是反汇编 应用固件 产生的 机器码-汇编码 相互对应的内容)
重定位、启动和编译
各段数据重排序
每一个汇编成机器码的 .o 文件都会分为这几个数据段:
-
代码段(.text):存放代码指令;
-
只读数据段(.rodata):存放有初始值并且 const 修饰的全局类变量;
-
数据段(.data):存放有初始值的全局类变量(有非零初始值的变量,如
char A = 'A';); -
零初始化段(.bss):存放没有初始值或初始值为0的全局类变量(如
int g_intA = 0;int g_intB;,这些存放在 .bss 段); -
注释段(.comment):存放注释。
在 Makefile 文件中,在链接步骤,通过 LD 工具,把各个 .o 文件的各个数据段,按照 imx6ull.lds 定义的顺序安放,即各段数据重排序,最后合成一个二进制文件 app.bin,其中的代码段(.text)、只读数据段(.rodata)和数据段(.data)等都来自于前面各个 .o 文件,每个段 的顺序按照 imx6ull.lds 安放。
链接脚本 imx6ull.lds 解析(一体式链接脚本格式):
SECTIONS {
. = 0x80100000; //设定链接地址为0x80100000
. = ALIGN(4); //将当前地址以4字节为标准对齐
.text : //创建段,其名称为 .text
{ //.text包含的内容为所有链接文件的数据段
*(.text) // *:表示所有文件
}
. = ALIGN(4); //将当前地址以4字节为标准对齐
.rodata : { *(.rodata) } //.rodata存放在.text之后,包含所有链接文件的只读数据段
. = ALIGN(4);
.data : { *(.data) } //.data存放在.rodata之后,包含所有链接文件的只读数据段
. = ALIGN(4);
__bss_start = .; //将当前地址的值存储为变量__bss_start
.bss : { *(.bss) *(.COMMON) } //.bss存放在.data段之后, 包含所有文件的bss段和注释段
__bss_end = .; //将当前地址的值存储为变量__bss_end
}
可见 imx6ull.lds 文件给出 .bss 段的头、尾地址标识:__ bss_start 和 __ bss_end。
启动文件程序
以最简单的裸机点灯程序的启动文件 start.S 为例。仅为示例,过于简单,完整示例可看 下面 “ARM异常处理 & 启动文件的示例” 一节。
.text
.global _start
_start:
/* 设置栈地址 */
ldr sp,=0x80200000
bl main
halt:
b haltMakefile 文件解析
以最简单的裸机点灯程序的 makefile 为例。
PREFIX=arm-linux-gnueabihf-
CC=$(PREFIX)gcc
LD=$(PREFIX)ld
AR=$(PREFIX)ar
OBJCOPY=$(PREFIX)objcopy
OBJDUMP=$(PREFIX)objdump
led.img : start.S led.c main.c
$(CC) -nostdlib -g -c -o start.o start.S # 把启动文件 .s 和各个 .c 文件都汇编为机器码文件 .o
$(CC) -nostdlib -g -c -o led.o led.c
$(CC) -nostdlib -g -c -o main.o main.c
$(LD) -T imx6ull.lds -g start.o led.o main.o -o led.elf # 链接,按照 imx6ull.lds 定义的格式,各段数据重排序,把各个 .o 文件组成 .elf 文件
$(OBJCOPY) -O binary -S led.elf led.bin # .elf 转为 .bin 二进制文件,应用二进制文件
$(OBJDUMP) -D -m arm led.elf > led.dis
mkimage -n ./tools/imximage.cfg.cfgtmp -T imximage -e 0x80100000 -d led.bin led.imx
# 使用 mkimage 生成 头部数据,并与 .bin 组合,产生 .imx 文件
dd if=/dev/zero of=1k.bin bs=1024 count=1 # 创建一个 1KB 的空文件 1k.bin
cat 1k.bin led.imx > led.img # 把 1k.bin 放在 .imx 前头,组合成 .img 文件
clean:
rm -f led.dis led.bin led.elf led.imx led.img *.o
清零 bss 段
在 启动文件 汇编程序中,根据 .bss 段的头、尾地址(__ bss_start、__ bss_end)来对此区域清零,让 C 程序中未定义初始值或零初始值的变量在初始化时都为零值,而非随机值。
附程序:
clean_bss:
ldr r1, =__bss_start @ 将链接脚本变量__bss_start变量保存于r1
ldr r2, =__bss_end @ 将链接脚本变量__bss_end变量保存于r2
mov r3, #0
clean:
strb r3, [r1] @ 将当前地址下的数据清零
add r1, r1, #1 @ 将r1内存储的地址+1
cmp r1, r2 @ 相等:清零操作结束;否则继续执行clean函数清零bss段
bne clean
mov pc, lr并在进入主函数前调用 bl clean_bss /* 清零bss段 */。
数据段再单独重定位
事出有因,想要把 .data 段的数据放到 片内内存中以加快访问速度,参考芯片手册得到片内RAM的地址为:0x900000 ~ 0x91FFFF,共128KB(当然不会很大,也就裸机下的编一编、学一学行,Linux 系统等的大型工程就不适合了),所以我们将 .data 段重定位后的地址设置为0x900000。
第一步:把链接脚本 imx6ull.lds 中的 .data : { *(.data) }换成下面的:
data_load_addr = .;
.data 0x900000 : AT(data_load_addr)
{
data_start = . ; //addr = 0x900000
*(.data)
data_end = . ; //addr = 0x900000 + SIZEOF(.data)
}第二步:在启动文件中,复制 data 段数据到片内内存 data_start
copy_data:
/* 重定位data段 */
ldr r1, =data_load_addr /* data段的加载地址, 从链接脚本中得到, 0x8010xxxx */
ldr r2, =data_start /* data段重定位地址, 从链接脚本中得到, 0x900000 */
ldr r3, =data_end /* data段结束地址, 从链接脚本中得到,0x90xxxx */
cpy:
ldr r4, [r1] /* 从r1读到r4 */
str r4, [r2] /* r4存放到r2 */
add r1, r1, #4 /* r1+1 */
add r2, r2, #4 /* r2+1 */
cmp r2, r3 /* r2 r3比较 */
bne cpy /* 如果不等则继续拷贝 */
mov pc, lr /* 跳转回调用copy_data函数之前的地址 */并在进入主函数前调用 bl copy_data /* 复制 data 段数据到片内内存 data_start */
100ask imx6ull 的 《IMX6ULL裸机开发完全手册》中的 "第13篇 IMX6ULL裸机开发 - 9.4.3 总结:如何在C函数中使用链接脚本变量" 章节讲了如何在 C 程序中调用链接脚本中的表示地址的变量,从而可以在 C 程序中实现 "清零 bss 段"和"数据段搬运到片内内存",而不用在启动代码里完成这些操作。
100ask imx6ull 的 《IMX6ULL裸机开发完全手册》中的 "第13篇 IMX6ULL裸机开发 - 9.5 重定位全部代码" 章节讲了将全部应用的二进制数据搬到芯片的内部内存(128KB),并在其内运行,并且使用 C 程序实现 bss 段清零。其步骤是:第一步,修改链接脚本,段顶位置加上 . = 0x900000;,并加上头、尾的地址标识字符;第二步,在 C 程序中利用头、尾的地址标识字符将其间的数据搬运到芯片内部内存地址;第三步,修改启动文件汇编程序,跳转到内部内存的应用数据处执行。
修改应用在内存中的存放地址
IVT 中的 entry(指示 app.bin 在内存中的位置,即程序数据被复制到内存哪里)的地址在 Makefile 中调用 mkimage 工具时是可以指定,需要改相关联的几个地方如下:
假设应用的二进制数据(app.bin)原来是要存放在内存的 0x80100000 位置,现在要改为 app_address 处。
-
Makefile 文件中修改 -e 选项后的地址
mkimage -n ./tools/imximage.cfg.cfgtmp -T imximage -e 0x80100000 -d relocate.bin relocate.imx。 -
链接脚本 imx6ull.lds 中
SECTIONS { . = 0x80100000;...此处改为 app_address 。 -
启动文件 start.S 内,要修改栈地址 sp,
ldr sp,=0x80200000此处根据 app_address 与 0x80100000 的偏移相应修改,对于小的裸机程序,可以至少比 app_address 大 0x00100000。
100ASK IMX6ULL Flashing Tool 工具使用
-
通过 USB 运行裸机程序(不需要烧写,通过u-boot直接在内存中运行):
板子设到 USB 启动,在 100ask_imx6ull_flashing_tool 工具中的“专业版”界面,打开 .imx 文件,直接点运行。
-
通过 USB 烧写裸机程序:
板子设到 USB 启动,在 Tool 中的“基础版”界面,若选 EMMC ,则用 .imx 文件,若选 SD ,则用 .img 文件。成功后,断电,切到 EMMC 或 SD 启动模式,再上电。
或者在 win 上,用 win disk imager 工具,把 .img 文件写到 SD 卡。
-
基础版界面详情:
| 按钮 | 作用 |
|---|---|
| 烧写整个系统 | “选择设备”为EMMC时,把emmc.img烧到EMMC上; “选择设备”为SD/TF时,把sdcard.img烧到SD/TF卡上; “选择设备”为NAND时,把rootfs.ubi烧到Nand Flash上; 并且会烧写对应的U-Boot,请看下面的“更新Uboot”按钮说明。 |
| 更新内核 | 把zImage上传到根文件系统的/boot目录 (对于Nand,是直接烧到内核分区) |
| 更新设备树 | 把100ask_imx6ull-14x14.dtb上传到根文件系统的/boot目录 (对于Nand,是直接烧到设备树分区) |
| 更新Uboot | 对于IMX6ULL全功能版: ①“选择设备”为EMMC时,把u-boot-dtb.imx烧写到EMMC ②“选择设备”为SD/TF时,把u-boot-dtb.imx烧写到SD/TF卡 对于IMX6ULL mini nand版: ①“选择设备”为NAND时,把u-boot-dtb_nand.imx烧写到Nand Flash ②“选择设备”为SD/TF时,把u-boot-dtb_nandsd.imx烧写到SD/TF卡 |
| 烧写裸机 | 把所选裸机文件,烧写到EMMC、SD/TF卡或Nand Flash |
| 上传文件 | 把所选用户文件,上传到根文件系统的/目录 对于imx6ull mini nand版,无法上传文件(只支持ext4文件系统,而它不是) |
异常与GIC介绍
GIC概念
念课本(以下内容都是针对"通用中断控制器(GIC)"而言,直接摘录的,有的地方可能不符人类的理解方式):
通用中断控制器(GIC)架构提供了严格的规范,不同厂商的中断控制器之间具有很高的一致性;该控制器包括一组用于管理单核或多核系统中的中断的硬件资源。GIC提供了内存映射寄存器,可用于管理中断源和行为,以及(在多核系统中)用于将中断路由到各个CPU核。它使软件能够屏蔽、启用和禁用来自各个中断源的中断,以(在硬件中)对各个中断源进行优先级排序和生成软件触发中断。它还提供对TrustZone安全性扩展的支持。GIC接受系统级别中断的产生,并可以发信号通知给它所连接的每个内核,从而有可能导致IRQ或FIQ异常发生。
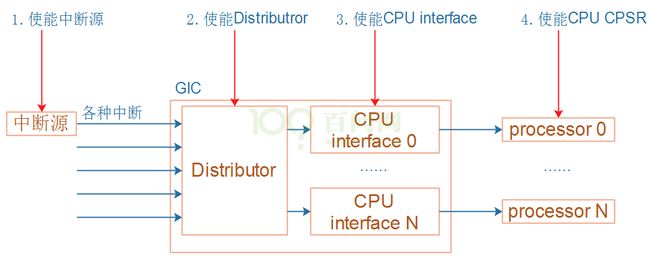
通用中断控制器的工作流程。GIC分为两部分:分发器(Distributor)和CPU接口(CPU interface)。系统中的所有中断源都连接到分发器。可以通过仲裁单元的寄存器来控制各个中断源的属性,例如优先级、状态、安全性、触发方式和使能状态。中断的优先级和可接收中断的核都在分发器中配置。分发器把中断输出到“CPU接口单元”,后者决定将哪个中断转发给CPU核。CPU接口单元寄存器用于屏蔽、识别和控制转发到CPU核的中断的状态。系统中的每个CPU核心都有一个单独的CPU接口,一个CPU核不可能访问另一个CPU核的CPU接口。中断处理详情请看下面的"处理中断"部分。
GIC作为内存映射的外围设备,被软件访问。所有内核都可以访问公共的 GIC的分发器 单元。
中断在软件中由一个称为中断ID的数字标识。中断ID唯一对应于一个中断源。软件可以使用中断ID来识别中断源并调用相应的处理程序来处理中断。呈现给软件的中断ID由系统设计确定,一般在SOC的数据手册有记录。
中断可以有多种不同的类型:
-
软件触发中断(SGI,Software Generated Interrupt)。这是由软件通过写入专用仲裁单元的寄存器即软件触发中断寄存器(ICDSGIR)显式生成的。它最常用于CPU核间通信。SGI既可以发给所有的核,也可以发送给系统中选定的一组核心。中断号0-15保留用于SGI的中断号。用于通信的确切中断号由软件决定。
-
私有外设中断(PPI,Private Peripheral Interrupt)这是由单个CPU核私有的外设生成的。PPI的中断号为16-31。它们标识CPU核私有的中断源,并且独立于另一个内核上的相同中断源,比如,每个核的计时器。
-
共享外设中断(SPI,Shared Peripheral Interrupt)。这是由外设生成的,中断控制器可以将其路由到多个核。中断号为32-1020。SPI用于从整个系统可访问的各种外围设备发出中断信号。
GIC分发器 拥有许多寄存器,可以通过它们配置各个中断的属性。这些可配置属性是:
-
中断优先级:GIC分发器使用它来确定接下来将哪个中断转发到CPU接口。
-
中断配置:这确定中断是对电平触发还是边沿触发。
-
中断目标:这确定了可以将中断发给哪些CPU核。
-
中断启用或禁用状态:只有GIC分发器中启用的那些中断变为挂起状态时,才有资格转发。
-
中断安全性:确定将中断分配给Secure还是Normal world软件。
-
中断状态。中断标志位需要软件清除。
-
GIC分发器还提供优先级屏蔽,可防止低于某个优先级的中断发送给CPU核。
处理流程
众多的中断源,汇集于中断管理器,由中断管理器选择优先级最高的中断并通知CPU。CPU会根据中断的类型到跳转到不同的地址处理中断。当CPU核接收到中断时,它会跳转到异常向量表执行。顶层中断处理程序读取CPU接口模块的Interrupt Acknowledge Register,以获取中断ID。除了返回中断ID之外,读取操作还会使该中断在GIC分发器中标记为active状态。一旦知道了中断ID(标识中断源),顶层处理程序就可以根据中断ID来执行相应的处理任务。
当特定于设备的处理程序完成执行时,顶级处理程序将相同的中断ID写入CPU interface模块中的End of Interrupt register中断结束寄存器,指示中断处理结束。除了把当前中断移除active状态之外,这将使最终中断状态变为inactive或pending(如果状态为inactive and pending),这将使CPU interface能够将更多待处理pending的中断转发给CPU核。这样就结束了单个中断的处理。
同一CPU核上可能有多个中断等待服务,但是CPU interface一次只能发出一个中断信号。顶层中断处理程序重复上述顺序,直到读取特殊的中断ID值1023,表明该内核不再有任何待处理的中断。这个特殊的中断ID被称为伪中断ID(spurious interrupt ID),伪中断ID是保留值,不能分配给系统中的任何设备。

再讲一遍,中断信号先到达分发器,分发器根据该中断所设定的CPU,把中断发送到CPU对应的CPU interface上;在CPU interface里判断该中断的优先级是否足够高,能否抢断或打断当前的中断处理,如果可以,CPU interface就会发送一个物理的信号到CPU的IRQ(或FIQ)线上;CPU接收到中断信号,转到中断处理地址进行处理。
初始化流程
复位后,必须初始化GIC,中断才能生效。在初始化中断时,要初始化这4部分:产生中断的源头(GPIO模块或UART模块等)、GIC(内部有Distributor或CPU interface)、CPU本身(设置CPSR寄存器)。
最后提一句,相关的初始化和处理的代码,芯片官方会提供裸机编程的框架,提供基本的所有寄存器及其结构体的 .h 文件,以及相关使用例程代码,用时看懂就行。
前文根据 100ask的《imx6ull裸机编程》部分的 第十章 “异常与中断” 一节 进行简单总结,后面再看100ask的《imx6ull裸机编程》部分的 第十一章 “GPIO中断” 内容可了解裸机编程中的中断部分。
更多内容
-
中断管理_lgjjeff的博客-CSDN博客。
-
...
ARM异常处理 & 启动文件的示例
这里根据 100ask的《imx6ull裸机编程》部分的介绍内容,给出一个 比较丰富的、删去无关代码保留中断处理的、注释丰富的一个 启动文件 汇编程序示例。
@ 本程序仅仅是一个示例
@ 不同ARM内核的中断向量表不同,具体看手册
@ 现在的微处理器寄存器结构非常复杂,不建议硬刚芯片手册手写配置代码,直接参考厂家和网络高手的例子特别省事
@ 一些基础的、不变的、规律性的则必须要会
@ 中断的保存、恢复现场,以及分辨中断号和调用相应中断函数,Cortex M3/M4 是硬件完成的, Cortex A7 是软件实现的
.text @ 代码段(.text),表示代码段
@ 其他段介绍:
@ 只读数据段(.rodata):存放有初始值并且const修饰的全局类变量(全局变量或static修饰的局部变量)
@ 数据段(.data):存放有初始值的全局类变量
@ 注释段(.comment):存放注释,注释段里面的机器码是用来表示文字的
@ 零初始化段(.bss):存放没有初始值或初始值为0的全局类变量
@ 注:bss段和注释段不保存在bin/elf文件中,
@ 所以如果bss段的数据没有清0的话,没有初始值的变量在初始化时会是随机的,但个人觉得清不清0不是特别重要。
.global start @ .global 表示 start 是一个全局符号
start: @ 程序入口
@异常向量表
b reset @ 0x00 reset
ldr pc,=_undef @ 0x04 undef 未定义指令异常
ldr pc,=_swi_handler @ 0x08 swi 软中断入口 (如果用 mov 指令有32M地址大小限制)
ldr pc,=_pre_fetch @ 0x0c prefetch abort
ldr pc,=_data_abort @ 0x10 data abort
nop @ 0x14 reserved
ldr pc,=_irq @ 0x18 irq
ldr pc,=_fiq @ 0x1c fiq
_undef: .word _undef
_swi_handler: .word _swi_handler
_pre_fetch: .word _pre_fetch
_data_abort: .word _data_abort
_irq: .word _irq
_fiq: .word _fiq
_swi_handler:
stmfd sp!,{r0-r12,lr} @ 把 r0-r12 和 lr 寄存器内容进栈,即保护现场
sub r0,lr,#4 @ 软中断号被保存到 lr 寄存器的上一个指令地址,将其临时保存到 r0
ldr r0,[r0] @ 取 r0 保存的地址所指向的值
bic r0,#0xff000000 @ 根据手册,软中断号被保存在低 24 位,则把高八位内容清 0
bl swi_user_handle @ 跳转到 swi_user_handle 软中断用户处理程序,并把下一指令的地址保存到 lr 中
ldmfd sp!,{r0-r12,pc}^ @ 从栈恢复 r0-r12 寄存器内容,并把原来的 lr 内容 恢复到 pc 中,
@ 并从 spsr(cpsr的影子寄存器)恢复到 cpsr,即恢复现场
swi_user_handle:
@... 软中断的用户应用程序,可以调用 c 函数
cmp r0,#2 @ 判断软中断号是否为2,是则执行后面尾缀带eq的指令
moveq r7,#2
cmp r0,#5 @ 判断软中断号是否为5,是则执行后面尾缀带eq的指令
moveq r7,#5
cmp r0,#7 @ 判断软中断号是否为7,是则执行后面尾缀带eq的指令
moveq r7,#7
ldr pc,lr @ 跳回
_irq:
sub lr,lr,#4
stmfd sp!,{r0-r12,lr}
bl irq_user_handle
ldmfd sp!,{r0-r12,pc}^
irq_user_handle:
@... 外中断的用户应用程序,可以调用 c 函数
@并在用户程序中,从中断控制器的寄存器中读出当前的中断号,做相应的相应,然后清中断标志位
@现在的微处理器寄存器结构非常复杂,不建议硬刚芯片手册手写配置代码,直接参考厂家和网络高手的例子特别省事
ldr pc,lr
reset:
ldr sp,=stack_base @ 分配栈地址到 sp 寄存器
msr cpsr,#0x10 @ 切换到 user 模式
@... 用户应用程序,可以调用 c 函数
swi 2 @ 触发软中断,自动跳转到软中断程序入口
@ 并自动把返回地址(下一个指令的地址)保存到 LR 寄存器
@ 并自动切换到 SVC(超级用户) 模式
nop
nop
swi 5
nop
nop
swi 7
nop
nop
/*
@ 这一段是调用 c 程序里面的 void print_test_string(unsigned int cpsr, char *str) 函数
@ 给它传入的两个实参为 r0 和 r1
@ 这时 ARM-THUMB procedure call standard(ARM-Thumb过程调用标准)所规定的
mrs r0, cpsr
ldr r1, =test_string
bl print_test_string
*/
b reset @ 返回 reset 地址,大循环
/*
test_string:
.string "test_string"
*/
@ 定义栈空间和地址,buf 为栈的开头地址,stack_base 为栈的尾地址,中间有 32 个 word 空间
@ 我们使用进出栈的指令是 stmfd 和 ldmfd
@ 这两个指令,为从 stack_base 开始向上递进存,向下递进取的顺序,与这里定义的顺序一致
/*
ldr sp,=0x80200000
stmfd sp!, {r0-r2} @ 入栈
ldmfd sp!, {r0-r2} @ 出栈
结果:
0x00000000
...
0x801FFFF4 -> R0
R1
0x80200000 -> R2 sp指针的移动方向:存向上,取向下
也可以用下面指令,效果一样
push {r0-r2} @ 入栈
pop {r0-r2} @ 出栈
*/
/*
栈的存取方式
栈的存取方式,为后进先出(LIFO),是由于进出栈指令的作用方式决定的,数据在栈指针处入栈时,
如 stmfd sp!,{r0-r12,lr},根据这个指令的含义,栈指针sp会根据数据存放的方向自增或自减,出栈的时候过程相反,
在外界看来,这种方式就是只能在头部进出数据的线性表,从算法上来说是一种特殊的线性表,这种
方式是由汇编指令和硬件的易实现性所决定的。
堆是一块空闲空间,使用 malloc 函数来管理它,malloc 函数可以自己写
"stack_base:" 这种带冒号的标签表示地址位置,通过其得到指令/数据地址
*/
.data
buf:
.space 32
stack_base:
.end