Linux内核4.14版本——SPI框架(7)——spidev.c分析
目录
1. 简介
3. spidev_fops
3.1 spidev_read
3.2 spidev_write
3.3 spidev_ioctl
4. 参考文章
1. 简介
spidev.c文件:它是一个字符设备,满足字符设备的框架(注册设备、构造file_operation结构体、提供给虚拟文件系统的open、read、write函数接口)。
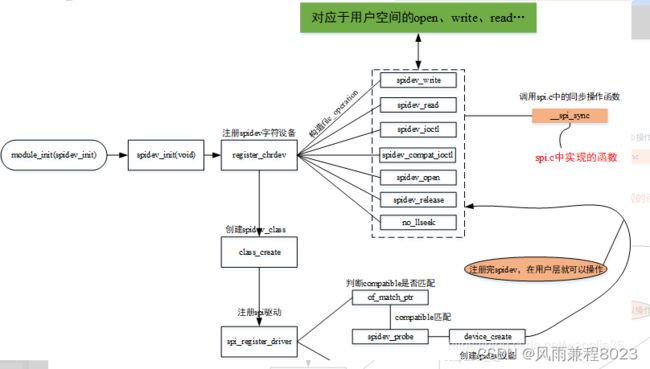
2. 驱动入口函数
static int __init spidev_init(void)
{
int status;
/* Claim our 256 reserved device numbers. Then register a class
* that will key udev/mdev to add/remove /dev nodes. Last, register
* the driver which manages those device numbers.
*/
BUILD_BUG_ON(N_SPI_MINORS > 256);
status = register_chrdev(SPIDEV_MAJOR, "spi", &spidev_fops);
if (status < 0)
return status;
spidev_class = class_create(THIS_MODULE, "spidev");
if (IS_ERR(spidev_class)) {
unregister_chrdev(SPIDEV_MAJOR, spidev_spi_driver.driver.name);
return PTR_ERR(spidev_class);
}
status = spi_register_driver(&spidev_spi_driver);
if (status < 0) {
class_destroy(spidev_class);
unregister_chrdev(SPIDEV_MAJOR, spidev_spi_driver.driver.name);
}
return status;
}
module_init(spidev_init);
static void __exit spidev_exit(void)
{
spi_unregister_driver(&spidev_spi_driver);
class_destroy(spidev_class);
unregister_chrdev(SPIDEV_MAJOR, spidev_spi_driver.driver.name);
}
module_exit(spidev_exit);
3. spidev_fops
static const struct file_operations spidev_fops = {
.owner = THIS_MODULE,
/* REVISIT switch to aio primitives, so that userspace
* gets more complete API coverage. It'll simplify things
* too, except for the locking.
*/
.write = spidev_write,
.read = spidev_read,
.unlocked_ioctl = spidev_ioctl,
.compat_ioctl = spidev_compat_ioctl,
.open = spidev_open,
.release = spidev_release,
.llseek = no_llseek,
};3.1 spidev_read
spidev_read->spidev_sync_read->spidev_sync->spi_sync->__spi_sync
3.2 spidev_write
spidev_write->spidev_sync_write->spidev_sync->spi_sync
3.3 spidev_ioctl
static long
spidev_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int retval = 0;
struct spidev_data *spidev;
struct spi_device *spi;
u32 tmp;
unsigned n_ioc;
struct spi_ioc_transfer *ioc;
/* Check type and command number */
if (_IOC_TYPE(cmd) != SPI_IOC_MAGIC)
return -ENOTTY;
/* guard against device removal before, or while,
* we issue this ioctl.
*/
spidev = filp->private_data;
spin_lock_irq(&spidev->spi_lock);
spi = spi_dev_get(spidev->spi);
spin_unlock_irq(&spidev->spi_lock);
if (spi == NULL)
return -ESHUTDOWN;
/* use the buffer lock here for triple duty:
* - prevent I/O (from us) so calling spi_setup() is safe;
* - prevent concurrent SPI_IOC_WR_* from morphing
* data fields while SPI_IOC_RD_* reads them;
* - SPI_IOC_MESSAGE needs the buffer locked "normally".
*/
mutex_lock(&spidev->buf_lock);
switch (cmd) {
/* read requests */
case SPI_IOC_RD_MODE:
retval = put_user(spi->mode & SPI_MODE_MASK,
(__u8 __user *)arg);
break;
case SPI_IOC_RD_MODE32:
retval = put_user(spi->mode & SPI_MODE_MASK,
(__u32 __user *)arg);
break;
case SPI_IOC_RD_LSB_FIRST:
retval = put_user((spi->mode & SPI_LSB_FIRST) ? 1 : 0,
(__u8 __user *)arg);
break;
case SPI_IOC_RD_BITS_PER_WORD:
retval = put_user(spi->bits_per_word, (__u8 __user *)arg);
break;
case SPI_IOC_RD_MAX_SPEED_HZ:
retval = put_user(spidev->speed_hz, (__u32 __user *)arg);
break;
/* write requests */
case SPI_IOC_WR_MODE:
case SPI_IOC_WR_MODE32:
if (cmd == SPI_IOC_WR_MODE)
retval = get_user(tmp, (u8 __user *)arg);
else
retval = get_user(tmp, (u32 __user *)arg);
if (retval == 0) {
u32 save = spi->mode;
if (tmp & ~SPI_MODE_MASK) {
retval = -EINVAL;
break;
}
tmp |= spi->mode & ~SPI_MODE_MASK;
spi->mode = (u16)tmp;
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "spi mode %x\n", tmp);
}
break;
case SPI_IOC_WR_LSB_FIRST:
retval = get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u32 save = spi->mode;
if (tmp)
spi->mode |= SPI_LSB_FIRST;
else
spi->mode &= ~SPI_LSB_FIRST;
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "%csb first\n",
tmp ? 'l' : 'm');
}
break;
case SPI_IOC_WR_BITS_PER_WORD:
retval = get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u8 save = spi->bits_per_word;
spi->bits_per_word = tmp;
retval = spi_setup(spi);
if (retval < 0)
spi->bits_per_word = save;
else
dev_dbg(&spi->dev, "%d bits per word\n", tmp);
}
break;
case SPI_IOC_WR_MAX_SPEED_HZ:
retval = get_user(tmp, (__u32 __user *)arg);
if (retval == 0) {
u32 save = spi->max_speed_hz;
spi->max_speed_hz = tmp;
retval = spi_setup(spi);
if (retval >= 0)
spidev->speed_hz = tmp;
else
dev_dbg(&spi->dev, "%d Hz (max)\n", tmp);
spi->max_speed_hz = save;
}
break;
default:
/* segmented and/or full-duplex I/O request */
/* Check message and copy into scratch area */
ioc = spidev_get_ioc_message(cmd,
(struct spi_ioc_transfer __user *)arg, &n_ioc);
if (IS_ERR(ioc)) {
retval = PTR_ERR(ioc);
break;
}
if (!ioc)
break; /* n_ioc is also 0 */
/* translate to spi_message, execute */
retval = spidev_message(spidev, ioc, n_ioc);
kfree(ioc);
break;
}
mutex_unlock(&spidev->buf_lock);
spi_dev_put(spi);
return retval;
}设置spi的一些设备参数等。
4. 参考文章
linux SPI驱动开发_wangjie36的博客-CSDN博客
spi 驱动一:spi基本结构和spidev文件系统_老鹏-CSDN博客_spidev
AM335X——SPI设备驱动_hceng_linux-CSDN博客_am335x spi