STM32F103 学习笔记(1)—— GPIO 初始化/配置
一、STM32F103 微控制器的 GPIO 简介
1. GPIO 简介
STM32F103 是 STM32 系列微控制器中的型号,也被称为 STM32F1 系列。它基于 ARM Cortex-M3 内核,以其丰富的外设和低功耗特性而闻名。GPIO(General Purpose Input Output)是 STM32F103 微控制器上的通用输入输出引脚。
STM32F103 微控制器提供了多个 GPIO 引脚,用于与外部设备进行数字信号的输入和输出。每个引脚都可以通过配置来灵活地设置为输入或输出。作为输入引脚时,GPIO 可以读取外部设备的状态,如按钮的按下状态或传感器的测量值。作为输出引脚时,GPIO 可以控制外部设备的操作,如驱动 LED 灯的亮灭。
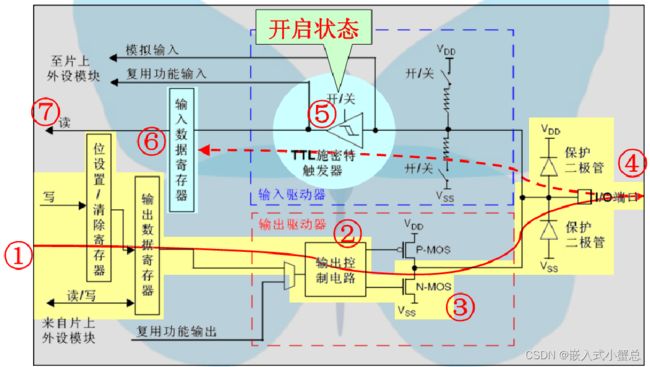
2. GPIO 内部结构

二、GPIO 的 8 种工作模式
4种输入模式:
- 输入浮空(GPIO_Mode_IN_FLOATING)
- 输入上拉 (GPIO_Mode_IPU)
- 输入下拉 (GPIO_Mode_IPD)
- 模拟输入 (GPIO_Mode_AIN)
4种输出模式:
- 开漏输出 (GPIO_Mode_Out_OD)
- 开漏复用输出 (GPIO_Mode_AF_OD)
- 推挽式输出 (GPIO_Mode_Out_PP)
- 推挽式复用输出 (GPIO_Mode_AF_PP)
1. GPIO 的输入工作模式 1——输入浮空模式(GPIO_Mode_IN_FLOATING)

浮空输入状态下,IO 的电平状态是不确定的,完全由外部输入决定,如果在该引脚悬空的情况下,读取该端口的电平是不确定的。
2. GPIO 的输入工作模式 2——输入上拉模式 (GPIO_Mode_IPU)

上拉输入状态下是将不确定的信号通过上拉电阻嵌位在高电平,防止输入端悬空,减少外部电流对芯片的干扰,同时起到限流作用,增加高电平输出时的驱动能力。当 GPIO 引脚无输入时,上拉输入在默认状态下为高电平。
3. GPIO 的输入工作模式 3——输入下拉模式 (GPIO_Mode_IPD)

下拉输入状态下是将不确定的信号通过下拉电阻嵌位在低电平,防止输入端悬空,减少外部电流对芯片的干扰,同时起到限流作用,增加低电平输出时的驱动能力。当 GPIO 引脚无输入时,下拉输入在默认状态下为低电平。
4. GPIO 的输入工作模式 4——模拟输入模式 (GPIO_Mode_AIN)

模拟输入状态即关闭施密特触发器,将电压信号传送到片上外设模块(不接上下拉电阻)。与数字输入模式不同,模拟输入模式允许引脚采样并转换模拟电压信号为对应的数字值。
5. GPIO 的输出工作模式 1——开漏输出模式 (GPIO_Mode_Out_OD)
开漏输出模式允许 GPIO 引脚输出低电平,而在高电平时处于高阻抗状态。它常用于共享总线或与其他设备联动的场景,需要外部上拉电阻来实现引脚的高电平输出。开漏输出的输出端相当于三极管的集电极,要得到高电平状态需要上拉电阻才行。适合于做电流型的驱动,其吸收电流的能力相对强(一般 20 ma以内)。
6. GPIO 的输出工作模式 2——开漏复用输出模式 (GPIO_Mode_AF_OD)

开漏复用输出模式允许 STM32 微控制器的 GPIO 引脚以开漏输出的方式连接到外部电路,并通过复用功能与其他外设或功能模块进行共享。
7. GPIO 的输出工作模式 3——推挽式输出模式 (GPIO_Mode_Out_PP)

推挽式输出模式可以输出高、低电平,连接数字器件。推挽结构一般由两个三极管分别受两互补信号的控制,总是在一个三极管导通的时候另一个截止 GPIO 的输出模式。
8. GPIO 的输出工作模式 4——推挽式复用输出模式 (GPIO_Mode_AF_PP)

推挽式复用输出模式允许 STM32 微控制器的 GPIO 引脚以推挽输出的方式连接到外部电路,并通过复用功能与其他外设或功能模块进行共享。
9. GPIO 引脚配置方式
通常有 5 种方式使用某个引脚功能,它们的配置方式如下:
(1)作为普通 GPIO 输入:根据需要配置该引脚为浮空输入、带弱上拉输入或带弱下拉输入,同时不要使能该引脚对应的所有复用功能模块。
(2)作为普通 GPIO 输出:根据需要配置该引脚为推挽输出或开漏输出,同时不要使能该引脚对应的所有复用功能模块。
(3)作为普通模拟输入:配置该引脚为模拟输入模式,同时不要使能该引脚对应的所有复用功能模块。
(4)作为内置外设的输入:根据需要配置该引脚为浮空输入、带弱上拉输入或带弱下拉输入,同时使能该引脚对应的某个复用功能模块。
(5)作为内置外设的输出:根据需要配置该引脚为复用推挽输出或复用开漏输出,同时使能该引脚对应的所有复用功能模块。
三、LED 灯初始化/配置(调用库函数)
/*************************************************************************
* 初始化LED输出端口
************************************************************************/
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOC端口时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; // LED-->PC.13端口
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_Out_PP; // 推挽输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // GPIO口速度为50MHz
GPIO_Init(GPIOC, &GPIO_InitStructure); // 初始化PC.13端口
// PC.13端口输出高电平 等同LED=1
GPIO_SetBits(GPIOC, GPIO_Pin_13);
} 1. 操作步骤 1——使能端口时钟(调用下列函数)
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState)
{
/* Check the parameters */
assert_param(IS_RCC_APB2_PERIPH(RCC_APB2Periph));
assert_param(IS_FUNCTIONAL_STATE(NewState));
if (NewState != DISABLE)
{
RCC->APB2ENR |= RCC_APB2Periph;
}
else
{
RCC->APB2ENR &= ~RCC_APB2Periph;
}
}(1)形参 RCC_APB2Periph 的有效选择项
#define RCC_APB2Periph_AFIO ((uint32_t)0x00000001)
#define RCC_APB2Periph_GPIOA ((uint32_t)0x00000004)
#define RCC_APB2Periph_GPIOB ((uint32_t)0x00000008)
#define RCC_APB2Periph_GPIOC ((uint32_t)0x00000010)
#define RCC_APB2Periph_GPIOD ((uint32_t)0x00000020)
#define RCC_APB2Periph_GPIOE ((uint32_t)0x00000040)
#define RCC_APB2Periph_GPIOF ((uint32_t)0x00000080)
#define RCC_APB2Periph_GPIOG ((uint32_t)0x00000100)
#define RCC_APB2Periph_ADC1 ((uint32_t)0x00000200)
#define RCC_APB2Periph_ADC2 ((uint32_t)0x00000400)
#define RCC_APB2Periph_TIM1 ((uint32_t)0x00000800)
#define RCC_APB2Periph_SPI1 ((uint32_t)0x00001000)
#define RCC_APB2Periph_TIM8 ((uint32_t)0x00002000)
#define RCC_APB2Periph_USART1 ((uint32_t)0x00004000)
#define RCC_APB2Periph_ADC3 ((uint32_t)0x00008000)
#define RCC_APB2Periph_TIM15 ((uint32_t)0x00010000)
#define RCC_APB2Periph_TIM16 ((uint32_t)0x00020000)
#define RCC_APB2Periph_TIM17 ((uint32_t)0x00040000)
#define RCC_APB2Periph_TIM9 ((uint32_t)0x00080000)
#define RCC_APB2Periph_TIM10 ((uint32_t)0x00100000)
#define RCC_APB2Periph_TIM11 ((uint32_t)0x00200000)(2)形参 NewState 的有效选择项
#define IS_FUNCTIONAL_STATE(STATE) (((STATE) == DISABLE) || ((STATE) == ENABLE))2. 操作步骤 2——配置 I/O 口状态
// 声明初始化I/O口的结构体并进行配置
GPIO_InitTypeDef GPIO_InitStructure;
// GPIO端口初始化函数
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct)结构体定义函数
typedef struct
{
uint16_t GPIO_Pin; /*!< Specifies the GPIO pins to be configured.
This parameter can be any value of @ref GPIO_pins_define */
GPIOSpeed_TypeDef GPIO_Speed; /*!< Specifies the speed for the selected pins.
This parameter can be a value of @ref GPIOSpeed_TypeDef */
GPIOMode_TypeDef GPIO_Mode; /*!< Specifies the operating mode for the selected pins.
This parameter can be a value of @ref GPIOMode_TypeDef */
} GPIO_InitTypeDef;a. 参数 GPIO_Pin 的有效选择项
#define GPIO_Pin_0 ((uint16_t)0x0001) /*!< Pin 0 selected */
#define GPIO_Pin_1 ((uint16_t)0x0002) /*!< Pin 1 selected */
#define GPIO_Pin_2 ((uint16_t)0x0004) /*!< Pin 2 selected */
#define GPIO_Pin_3 ((uint16_t)0x0008) /*!< Pin 3 selected */
#define GPIO_Pin_4 ((uint16_t)0x0010) /*!< Pin 4 selected */
#define GPIO_Pin_5 ((uint16_t)0x0020) /*!< Pin 5 selected */
#define GPIO_Pin_6 ((uint16_t)0x0040) /*!< Pin 6 selected */
#define GPIO_Pin_7 ((uint16_t)0x0080) /*!< Pin 7 selected */
#define GPIO_Pin_8 ((uint16_t)0x0100) /*!< Pin 8 selected */
#define GPIO_Pin_9 ((uint16_t)0x0200) /*!< Pin 9 selected */
#define GPIO_Pin_10 ((uint16_t)0x0400) /*!< Pin 10 selected */
#define GPIO_Pin_11 ((uint16_t)0x0800) /*!< Pin 11 selected */
#define GPIO_Pin_12 ((uint16_t)0x1000) /*!< Pin 12 selected */
#define GPIO_Pin_13 ((uint16_t)0x2000) /*!< Pin 13 selected */
#define GPIO_Pin_14 ((uint16_t)0x4000) /*!< Pin 14 selected */
#define GPIO_Pin_15 ((uint16_t)0x8000) /*!< Pin 15 selected */
#define GPIO_Pin_All ((uint16_t)0xFFFF) /*!< All pins selected */b. 参数 GPIO_Speed 的有效选择项
typedef enum
{
GPIO_Speed_10MHz = 1,
GPIO_Speed_2MHz,
GPIO_Speed_50MHz
} GPIOSpeed_TypeDef;
#define IS_GPIO_SPEED(SPEED) (((SPEED) == GPIO_Speed_10MHz) || ((SPEED) == GPIO_Speed_2MHz) || \
((SPEED) == GPIO_Speed_50MHz))c. 参数 GPIO_Mode 的有效选择项
typedef enum
{
GPIO_Mode_AIN = 0x00, //模拟输入
GPIO_Mode_IN_FLOATING = 0x04, //浮空输入
GPIO_Mode_IPD = 0x28, //下拉输入
GPIO_Mode_IPU = 0x48, //上拉输入
GPIO_Mode_Out_OD = 0x14, //开漏输出
GPIO_Mode_Out_PP = 0x10, //推挽输出
GPIO_Mode_AF_OD = 0x1C, //复用开漏输出
GPIO_Mode_AF_PP = 0x18 //复用推挽输出
} GPIOMode_TypeDef;
#define IS_GPIO_MODE(MODE) (((MODE) == GPIO_Mode_AIN) || ((MODE) == GPIO_Mode_IN_FLOATING) || \
((MODE) == GPIO_Mode_IPD) || ((MODE) == GPIO_Mode_IPU) || \
((MODE) == GPIO_Mode_Out_OD) || ((MODE) == GPIO_Mode_Out_PP) || \
((MODE) == GPIO_Mode_AF_OD) || ((MODE) == GPIO_Mode_AF_PP))3. 操作步骤 3——设置 I/O 口输出电平(调用下列函数)
// 设置I/O口输出低电平
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Pin));
GPIOx->BRR = GPIO_Pin;
}
// 设置I/O口输出高电平
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Pin));
GPIOx->BSRR = GPIO_Pin;
}(1)参数 GPIOx 有效选择项
#define IS_GPIO_ALL_PERIPH(PERIPH) (((PERIPH) == GPIOA) || \
((PERIPH) == GPIOB) || \
((PERIPH) == GPIOC) || \
((PERIPH) == GPIOD) || \
((PERIPH) == GPIOE) || \
((PERIPH) == GPIOF) || \
((PERIPH) == GPIOG))(2)参数 GPIO_Pin 有效选择项
#define GPIO_Pin_0 ((uint16_t)0x0001) /*!< Pin 0 selected */
#define GPIO_Pin_1 ((uint16_t)0x0002) /*!< Pin 1 selected */
#define GPIO_Pin_2 ((uint16_t)0x0004) /*!< Pin 2 selected */
#define GPIO_Pin_3 ((uint16_t)0x0008) /*!< Pin 3 selected */
#define GPIO_Pin_4 ((uint16_t)0x0010) /*!< Pin 4 selected */
#define GPIO_Pin_5 ((uint16_t)0x0020) /*!< Pin 5 selected */
#define GPIO_Pin_6 ((uint16_t)0x0040) /*!< Pin 6 selected */
#define GPIO_Pin_7 ((uint16_t)0x0080) /*!< Pin 7 selected */
#define GPIO_Pin_8 ((uint16_t)0x0100) /*!< Pin 8 selected */
#define GPIO_Pin_9 ((uint16_t)0x0200) /*!< Pin 9 selected */
#define GPIO_Pin_10 ((uint16_t)0x0400) /*!< Pin 10 selected */
#define GPIO_Pin_11 ((uint16_t)0x0800) /*!< Pin 11 selected */
#define GPIO_Pin_12 ((uint16_t)0x1000) /*!< Pin 12 selected */
#define GPIO_Pin_13 ((uint16_t)0x2000) /*!< Pin 13 selected */
#define GPIO_Pin_14 ((uint16_t)0x4000) /*!< Pin 14 selected */
#define GPIO_Pin_15 ((uint16_t)0x8000) /*!< Pin 15 selected */
#define GPIO_Pin_All ((uint16_t)0xFFFF) /*!< All pins selected */四、STM32 调试端口复用为 IO 口
当 IO 口不够用时,可以复用调试端口:SWIO-PA13,SWCLK-PA14
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable, ENABLE); // 端口重映射配置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 使能GPIOA端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14; // 端口引脚配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); // 根据设定参数初始化PA.13、PA.14
}