基于SURF的受电弓定位算法
当滑板磨耗超限、弓头倾斜和羊角缺失等典型故障出现的时候,都可能会引发严重交通事故,危及行车安全。因而,准确地检测受电弓的各种异常情况对于受电弓的维护和行车安全十分重要。首先应通过算法来进行受电弓的定位,为后续不同的故障类型检测打下基础。
2.1 机器视觉模板匹配算法
由于受电弓在车辆运行过程中始终位于图像的相对固定位置,则受电弓在图像中的定位问题即为机器视觉领域模板匹配问题。目前,常用的特征匹配算法主要有SIFT与SURF。
(a)SIFT
SIFT即尺度不变特征变换匹配算法(Scale Invariant Feature Transform, SIFT)。特征提取方法的成像匹配的核心问题是将同一目标在不同时间、不同分辨率、不同光照、不同位姿情况下所成的像相对应。传统的匹配算法往往是直接提取角点或边缘,对环境的适应能力较差。1999年British Columbia大学大卫.劳伊(David G.Lowe)教授总结了基于不变量技术的特征检测方法,并正式提出了一种基于尺度空间的、对图像平移、缩放、旋转甚至仿射变换保持不变性的图像局部特征描述算子。SIFT将一幅图像映射(变换)为一个局部特征向量集,同时对光照变化、投影变换也有一定不变性。
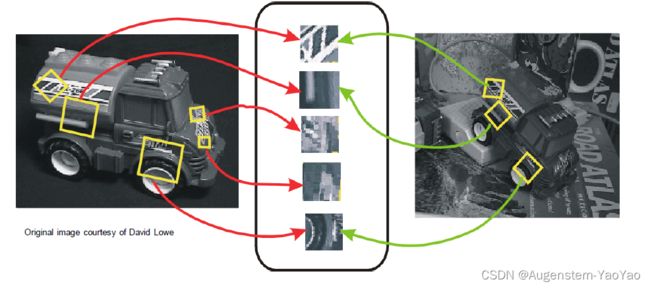
图13 SIFT用于特征匹配
SIFT算法具有以下特点:
1)具有较好的稳定性和不变性,能够适应旋转、尺度缩放、亮度的变化,能在一定程度上不受视角变化、仿射变换、噪声的干扰;
2) 区分性好,能够在海量特征数据库中进行快速准确的区分信息进行匹配;
3)多量性,就算只有单个物体,也能产生大量特征向量;
4)高速性,能够快速的进行特征向量匹配;
5)可扩展性,能够与其它形式的特征向量进行联合。
SIFT算法实现特征匹配主要有以下三个流程:
S1 提取关键点:关键点是一些十分突出的不会因光照、尺度、旋转等因素而消失的点,比如角点、边缘点、暗区域的亮点以及亮区域的暗点。此步骤是搜索所有尺度空间上的图像位置。通过高斯微分函数来识别潜在的具有尺度和旋转不变的兴趣点;
S2定位关键点并确定特征方向:在每个候选的位置上,通过一个拟合精细的模型来确定位置和尺度。关键点的选择依据于它们的稳定程度。然后基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向。所有后面的对图像数据的操作都相对于关键点的方向、尺度和位置进行变换,从而提供对于这些变换的不变性;
S3 通过各关键点的特征向量,进行两两比较找出相互匹配的若干对特征点,建立景物间的对应关系。
(b)SURF
SURF算法是SIFT算法的加速版,为加速稳健特征算法(Speeded Up Robust Features, SURF),是一种鲁棒的局部特征点检测和描述算法。最初由Herbert Bay发表在2006年的欧洲计算机视觉国际会议(Europen Conference on Computer Vision, ECCV)上,并在2008年正式发表在Computer Vision and Image Understanding期刊上。
SURF是对SIFT算法的改进,提升了算法的执行效率,为算法在实时计算机视觉系统中应用提供了可能。SURF将积分图使用在Hessian矩阵上,并应用了降维特征描述子,因此其执行效率相较SIFT算法具有明显提升。
2.2 受电弓定位算法
考虑到地铁车辆运行于复杂的光照环境,选定单独的模板图像作为SURF的对比基准将无法保证在实际运行时的模板匹配效果。具体而言,若SURF的基准图像为较暗光照环境下的受电弓监测图像,而被检测对象为光照较为强烈环境中的受电弓,由于两种环境差别明显,相似图像区域较少,则可能出现特征向量较少,甚至为零的情况,算法失去了泛化性能,不利于实际应用与部署。
根据上述分析,单一基础匹配模板无法适用于全部运行环境,本文提出采用多组环境中受电弓图像作为模板组的方法,每次将待识别图像与多组不同环境光下的受电弓基准模板均进行比较,根据特征向量的数量进行排序,获得最佳匹配基准图像,并在此基础上运用SURF算法进行模板匹配,最终获得鲁棒的受电弓定位算法。
根据实车车载监控视频,选取以下8幅图像作为基准模板组,其包括了不同环境光照强度、受电弓升起高度、受电弓倾斜角度等特征。


![]()
![]()


![]()
![]()
图14 SURF图像基准模板组
对于每幅车载弓网监控系统获得的图像,均进行下列算法流程:
S1:获得单帧图像数据;
S2:分别与8张基准图片进行SURF模板匹配,计算与每张基准图片之间的特征向量数量,并排序;
S3:选取与监控图像具有最多特征向量的基准图片作为最终SURF基准图片,并进行SURF模板匹配计算,获得特征点对应关系矩阵,并标注检测框;
S4:计算特征点组在基准图像与监测图像上的坐标平均值与方差,并对检测框进行对应的平移与缩放,获得最终的受电弓框选结果。
2.3 受电弓定位识别结果
使用车载弓网监控系统采集了6733帧受电弓运行视频,使用上述多基准SURF模板匹配识别算法进行了逐帧分析,并对于同时进行8张图像的模板匹配的计算特性采用了CPU并行计算编程,极大地提高了计算效率。
最终受电弓定位识别结果如图15所示。由图可知,在不同车辆运行环境下,均能够准确框选出受电弓在图像中的位置,因此证明算法有效并具有较强的鲁棒性。
(图片已删除)
图15 受电弓定位识别结果