PMCW体制雷达系列文章(1) – PMCW体制雷达综述
说明
相位调制连续波(Phase-modulated continuous wave, PMCW)雷达,或又被称为数字雷达,近年来开始被应用于汽车雷达领域。而且因其特有的一些优势(精度高、抗干扰能力强等)被认为是车载毫米波雷达的发展趋势之一(从目前占主导的调频连续波(Frequency-modulated continuous wave, FMCW)体制到PMCW体制)。PMCW相关的内容不可不察,于是我预设了系列文章以求比较系统地论述这个话题。
本篇文章:“PMCW体制雷达综述”作为本系列的第一篇,对该话题将涉及的内容做一个概览,并对PMCW雷达做必要的介绍。本话题下的系列文章将随着本人理解的深入不定期更新。
Blog
20231111 博文第一次写作
目录
说明
目录
一、PMCW雷达概述
二、PMCW雷达与FMCW雷达对比
2.1 射频前端架构与核心参数指标对比
2.2 雷达信号处理与性能对比
三、PMCW雷达与CDM
四、PMCW雷达之匹配滤波
五、PMCW雷达之抗干扰
六、总结
七、参考资料
一、PMCW雷达概述
PMCW雷达是指在发射端使用单频信号作为载波,并使用二进制码等编码方式对载波进行相位调制后发射、接收和处理并进而获取目标距离、速度以及角度信息的雷达。PMCW雷达是通信领域数字调制技术在雷达领域推广应用的体现。
PMCW技术在雷达领域的应用研究最早可追溯至20世纪60年代,当时美国国防部尝试研究将PMCW雷达技术用于军事和空间探索领域,早期的研究主要集中在如何实现相位调制和信号处理方面,且载波频率较低。进入21世纪后,随着数字信号处理技术的发展,PMCW雷达逐渐进入成熟期,数字信号处理器的应用使得雷达信号处理变得更加精确和高效,这一时期的研究重点主要集中在提高雷达性能、降本、减小体积和重量等方面。近年来,随着CMOS工艺、片上技术以及PCB技术的发展,在解决了包括ADC采样率、相位调制速率等方面的难题后,PMCW雷达开始被应用于车载毫米波雷达领域,且因其测量精度高、高动态范围以及特有的抗干扰能力强等优点受到了学术界和工业界越来越多的重视。于2015年在美国德州成立的Uhnder公司是将PMCW体制雷达带入智能驾驶的先驱者,该公司在2022年4月发布的S80片上雷达SOC芯片(已经量产)是全球首个通过车规级认证的4D数字成像雷达芯片解决方案,该芯片的实物图以及硬件架构示意图如下:

图1.1 Uhnder S80 PMCW SOC芯片实物图[1]

图1.2 Uhnder S80 PMCW芯片内部架构[2]
据相关报道,国内包括中科云杉、欧菲光、德心智能、黑芝麻等诸多雷达和智驾产品供应商都与Uhnder有开发合作,其中中科云杉已有数字雷达产品发布。PMCW雷达在收发模式、信号处理方法、硬件前端架构等方面与现有应用最为广泛FMCW雷达都有较大区别,也正是这些区别点构成了相较于FMCW体制雷达的优缺点。
本文后续章节安排如下:第二章论述两种体制雷达的对比;第三章讨论PMCW雷达MIMO发射模式,并重点关注FMCW&PMCW两种波形体制下的码分调制(code Division Multiple, CDM)下的发射方式与对比,关于MIMO发射模式在我很早前写的博文:【精选】车载毫米波雷达MIMO阵列的天线发射问题-CSDN博客中有过一些初步的介绍,这篇博文中也提及了PMCW,本文第三章内容算是对这篇博文的补充;第四章对PMCW雷达在信号处理端与FMCW雷达最核心的区别点:匹配滤波进行论述,并做仿真探讨;第五章内容对PMCW雷达最核心的优势:抗干扰能力做说明,关于雷达间的干扰问题,读者可以参看我之前写的博文:车载毫米波雷达信号处理中的干扰问题-CSDN博客,同样,本章内容也算是对这篇博文的补充,等这些章节的内容更新后我会在对应文章中更新内容和blog。
二、PMCW雷达与FMCW雷达对比
两种体制雷达各有优势,本章对其主要的区别点进行说明并做简要探讨。
2.1 射频前端架构与核心参数指标对比
如下图所示为两体制雷达的射频前端架构对比:

图2.1 PMCW&FMCW两种体制雷达的射频前端架构对比
在射频前端,FMCW雷达通过锁相环的压控振荡器(VCO)直接产生调频信号,该信号后续经过倍频后给到发射通道进行发射,并在接收端与回波信号进行混频。而PMCW雷达其本振是产生单频信号倍频后作为载频的,该载频在发射通道上被相位调制器产生的相位编码信号调制并发射,同时在接收端与回波信号进行混频。信号调制方式的不同是两者最本质的区别,FMCW雷达因为发射的是调频信号(信号的频率随时间变化),为保证雷达测量的准确性,对包括:频率锁定速度、调频线性度、功率平坦度等有严格要求(一般来说其调频线性度应不大于0.5%,在工作带宽内的功率平坦度应不大于3dB),而PMCW雷达发射的是单频信号,并不需要调频,所以其对包括频率源在内的射频链路器件要求更低,这是PMCW雷达的优点之一。(关于雷达芯片的硬件架构更细节的东西读者可以参考博文:毫米波雷达的硬件架构与射频前端-CSDN博客)
在回波信号链路上,FMCW体制雷达下,回波信号经过混频解调以及低通滤波后,不同距离目标的回波信号体现在混频滤波后的信号频谱上对应不同的频点,其频率值的大小与目标相对雷达的距离、发射信号的调频斜率有关:
![]() (2-1)
(2-1)
式中,R为目标相对雷达的距离,C为光速,S是chirp斜率,f为该距离为R的目标对应的频率值,举个例子,当R=200m,S=30MHz/us时,f=4MHz,一般而言,频率值f基本在MHz量级及以下(可以实现较低的基带频率正是FMCW这种体制的核心优势),所以FMCW雷达的ADC最高只需要覆盖几十MHz的频带。而对于PMCW雷达,目标回波与载波本振混频并低通滤波后虽然去掉了载频,但ADC的采样率需要覆盖相位的调制速率(带宽)!(为方便后续论述,这里给出PMCW雷达典型的发射模式),如下图所示为FMCW&PMCW两种体制雷达典型发射模式对比[3]:
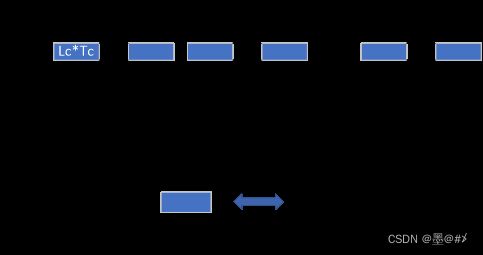
图2.2 FMCW&PMCW体制雷达发射时序对比示意图
假定PMCW雷达的相位调制时宽为Tc,雷达单脉冲下其相位编码序列的长度为Lc,则雷达单次发射的脉冲时长为Lc*Tc,为提高SNR,雷达一般会连续发射M个脉冲做累积,这M个脉冲就等价于FMCW体制雷达中的一个chirp,随后以此类推,重复发射N次以做速度测量(等价于FMCW雷达中的多普勒维度)。PMCW雷达的距离分辨率取决于单相位的调制时宽Tc(或调制速率1/Tc,这个会在后文的匹配滤波章节中有更详细说明):
![]() (2-2)
(2-2)
式中, Rres为雷达距离分辨率,C为光速,Tc为单chip的持续时间(也即单相位的持续时间),由带宽和脉宽的关系,1/Tc对应的便是带宽B,所以上式和FMCW体制雷达下的距离分辨率公式Rres = C/(2B)是一样的,举个例子,当Tc = 1ns时,雷达的距离分辨率为15cm,要保证雷达的距离分辨率足够小,则需要chip的时宽足够小,该值一般要在ns量级。PMCW体制下,给到ADC的混频滤波后的信号就是其相位调制信号,那么此时ADC的采样率至少需要覆盖其chip的调制带宽(1/Tc),所以PMCW雷达的ADC采样率一般至少要求到GHz量级!所以相较于FMCW雷达,PMCW雷达对ADC的采样率提出了更高的要求,同时,采样率的增加必然导致功耗增加,为了平衡该点,PMCW雷达中的ADC分辨率会设计得更低,FMCW雷达芯片中ADC的分辨率一般在12bit左右,而PMCW雷达芯片中可能只有6bit左右,分辨率的降低会影响雷达的动态范围。总之,更高的ADC采样率要求、更高的功耗以及更低的采样分辨率是PMCW雷达主要的缺点。下表列出了Uhnder雷达芯片与现有两款主流的FMCW雷达芯片的核心参数对比:
表1 PMCW&FMCW体制SOC芯片核心参数对比
| 参数 |
S80@Uhnder |
AWR2944@Ti |
Cal77S344@加特兰 |
| 可用频段 |
76-81GHz |
76-81GHz |
76-81GHz |
| 通道数 |
12T16R |
4T4R |
4T4R |
| 发射功率 |
22dBm(combined) |
13.5dBm |
12dBm |
| 相位噪声 |
-95dBc/Hz@1MHz |
-95dBc/Hz@1MHz |
-93dBc/Hz@1MHz |
| 接收通道间隔离度 |
>25dB |
- |
- |
| 收发通道隔离度 |
>50dB |
- |
-35dB(从本振到接收通道的泄露) |
| 内存 |
16MB |
4MB |
2MB@baseband 1MB@CPU |
| ADC采样率 |
2GHz(I/Q两路) |
37.5MHz(单路) |
50MHz(单路) |
| ADC位数 |
8bits |
10bits |
10bits |
| 处理器 |
2*Cortex-R5F ARM CPUs & 2*Tensilica-P5 DSPs |
ARM Cortex-R5F core@300MHz、C66x@360MHz、硬件加速器 |
双核Synopsys ARC EM22Fs |
| 功耗 |
9.5W@50%占空比 |
2.11w@4T4R&50%占空比 |
- |
| 接口 |
百兆/千兆以太网、CAN-FD、I2C、QSPI、GPIO |
百兆/千兆以太网、CAN-FD、UART、GPIO、LVDS、CSI2 |
百兆以太网、CAN-FD、UART、QSPI、I2C、GPIO |
| 封装&尺寸 |
eWLB封装,12.8*8.21mm |
BGA封装,12*12mm |
eWLB封装、9.12*9.12mm |
| 工艺 |
28nm CMOS |
45nm CMOS |
40nm CMOS |
Uhnder的S80芯片由于采用更低线宽的工艺,加之PMCW雷达对频综、PA等硬件的要求更低(内部硬件电路可以简化),所以即便其收发通道更多,但是尺寸却并没有成比例地增长。此外,包括相位噪声、噪声系数等指标甚至优于FMCW芯片产品,从上表来看,各项指标中差异最大的在于ADC采样率。
2.2 雷达信号处理与性能对比
如2.1节图2.1所示,ADC采集得到原始数据后,这两种体制雷达在信号处理上唯一的差别在于距离维压缩的方式不同,PMCW体制下使用匹配滤波的方法做距离维压缩,而FMCW体制下基于傅里叶变换FFT进行处理。匹配滤波的方法有诸多优势,比如其压缩后的主瓣宽度很小,不会影响临近距离门能量较小目标的检测,这很大程度上缓解了现有FMCW体制雷达难以识别强反射体旁弱目标这一痛点以及难点问题,此外,结合特定的编码方式,匹配滤波器下雷达更容易实现多发多收(Multiple-input Multiple-output, MIMO)下天线同时发射的难题,PMCW体制雷达更容易实现CDMA。这些是PMCW雷达在信号处理上的优势。关于PMCW雷达的发射问题,以及CDM在FMCW&PMCW两种体制雷达上的应用对比将在后文第三章进行更详细的论述,关于匹配滤波的细节实现及其仿真将在后文第四章展开。
但同时,PMCW体制下多普勒相移对雷达测量精度的影响更明显,需要对相位编码做优化设计或者在信号处理端增加多普勒补偿算法,关于经典的PMCW一发一收下的发射模式已经在2.1节图2.2相关的部分作出说明,从其发射模式可以知道,不同于FMCW体制雷达中单个Chirp即可完成距离维度的测量,PMCW体制雷达其距离维度的测量需要M个长度为Lc*Tc的序列进行叠加,当目标有速度时,间隔Lc*Tc的前后脉冲对应的回波之间目标的距离会发生变化,该微弱的距离变化会产生不可忽视的相移(因为载频很高,波长很短),该多普勒维度的相移对其距离维度的影响较大,特别是当目标速度较大时,如果不采取一些补偿算法,会导致距离维度的旁瓣抬升、降低目标的能量峰值、影响角度测量。这是PMCW体制雷达在信号处理上的缺点之一。
此外,PMCW雷达相较于FMCW雷达最核心的优势在于其抗干扰能力更强,FMCW体制雷达的射频信号需要占用很大的带宽(所用带宽越大其距离分辨率越高),而车载雷达可用频段是受限的:76-81GHz,于是随着雷达数量的增加,雷达见的干扰无疑会持续恶化,下图为NXP发布的关于车载雷达干扰问题的报告[4]中给出的在不同雷达装配率下的干扰概率图示:

图2.3 不同雷达装配率下的干扰概率
雷达受干扰后,可能会导致:出现虚假目标、抬高噪底并降低目标SNR,淹没弱小目标等问题,这些对于自动驾驶而言是十分严重的情况,雷达失真的检测结果会影响自动驾驶汽车的决策,并进而引发严重的交通事故。但是PMCW雷达可以更好地避免这些问题,关于该部分的讨论详见本文后文第五章。
三、PMCW雷达与CDM
写作中,后续写完上传后我会把文章链接贴在此处。
四、PMCW雷达之匹配滤波
写作中,后续写完上传后我会把文章链接贴在此处。
五、PMCW雷达之抗干扰
写作中,后续写完上传后我会把文章链接贴在此处。
六、总结
随着相关芯片技术和工艺的进步、成本的下降,PMCW体制SOC芯片将开始逐步走向市场,PMCW雷达因其特有的一些优势相信会是未来FMCW雷达强有力的挑战者。本文从PMCW雷达发展历程、射频架构、与FMCW雷达的优缺点对比、以及与PMCW雷达相关的几个核心技术点:发射模式与CDM、匹配滤波、抗干扰几个维度,多个方面对PMCW雷达做了全面而详尽的论述。本文的研究工作对于PMCW雷达产品研发、选型以及后续更深入的技术细节的研究做了很好的铺垫。关于PMCW雷达不同编码方式的对比、多普勒相移的补偿、FMCW&PMCW雷达系统仿真等更深层次的话题是后续工作开展的方向【PMCW雷达后续会作为一个单独的专题来开展】。
七、参考资料
[1] Uhnder – The First Digital Automotive Radar
[2] uhnder.com/images/data/S80_PTB_Rev1.0_May_5_2022_.pdf
[3] Bourdoux A , Ahmad U , Guermandi D ,et al.PMCW waveform and MIMO technique for a 79 GHz CMOS automotive radar[C]//2016 IEEE Radar Conference (RadarConf16).IEEE, 2016.DOI:10.1109/RADAR.2016.7485114.
[4] 汽车雷达系统 | NXP 半导体 (汽车应用中的雷达相互干扰)。