机器人系统ROS的简单实验、
接上回我们安装了ROS操作系统 安装机器人操作系统ROS在Ubuntu环境下
本文学习古月居ROS教学课件和相关视频,完成对ROS操作系统的简单学习使用
文章目录
- 一、ROS工作环境和工作包
- 1、话题编程
-
-
- 创建发布者
- 创建订阅者
- 2、服务编程
-
- 二、Rviz工具使用
-
- 1、安装Rviz
- 2、Rviz打开摄像头
- 三、gazebo 仿真
-
- 1、URDF机器人搭建
-
-
- 创建机器人建模的功能包
- 编辑launch文件
- 第一步:使用圆柱体创建一个车体模型
- 第二步:使用圆柱体创建左轮
- 第三步:使用圆柱体创建右轮
- 第四步:使用球体创建支撑脚
- 第五步:创建传感器摄像头
- 第五步:创建传感器激光雷达
- 第五步:创建传感器Kinect
-
- 2、gazebo 仿真器搭建环境
- 四、参考
一、ROS工作环境和工作包
新建目录catkin_ws和src存放文件
cd ~
mkdir -p catkin_ws/src
创建ROS工作环境
cd ~/catkin_ws/src
catkin_init_workspace

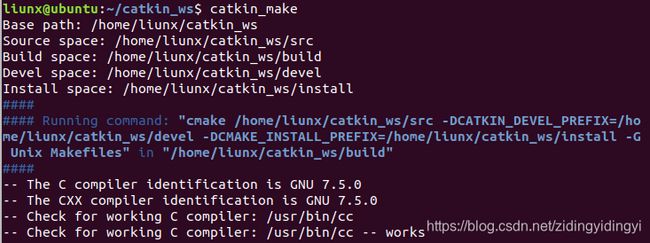
编译环境
cd ~/catkin_ws
catkin_make
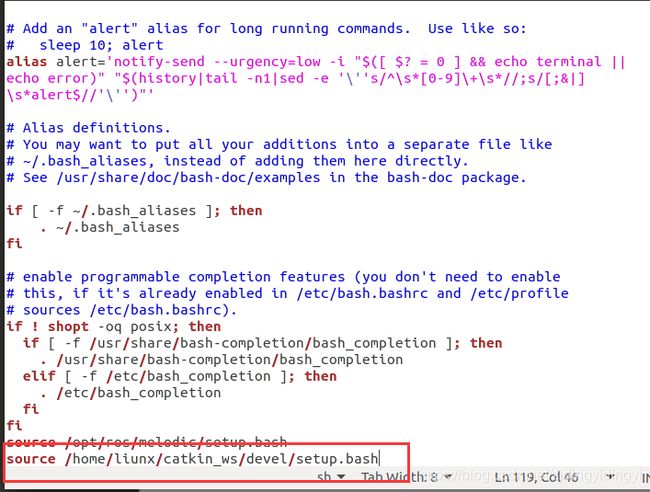
添加环境变量
cd ~/catkin_ws
source devel/setup.bash
gedit ~/.bashrc
echo $ROS_PACKAGE_PATH //查看环境
添加红框内容:
创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_communication std_msgs rospy roscpp

编译功能包
cd ~/catkin_ws
catkin_make

1、话题编程
话题编程的流程:
1、创建发布者
2、创建订阅者
3、添加编译
4、用行程序
创建发布者
流程:
1、初始化ROS节点
2、向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型
3、创建消息数据
4、按照一定频率循环发布消息
发布者代码:
#include 在CMakeLists.txt配置编译规则
add_executable(velocity_publisher src/velocity_publisher.cpp)//编译代码
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})//连接作用
编译
cd ~/catkin_ws
catkin_make
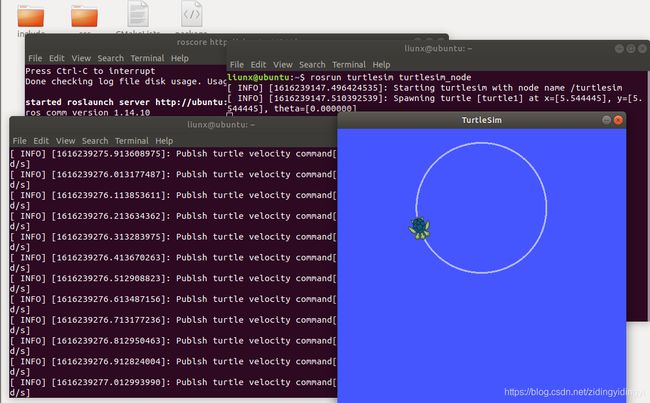
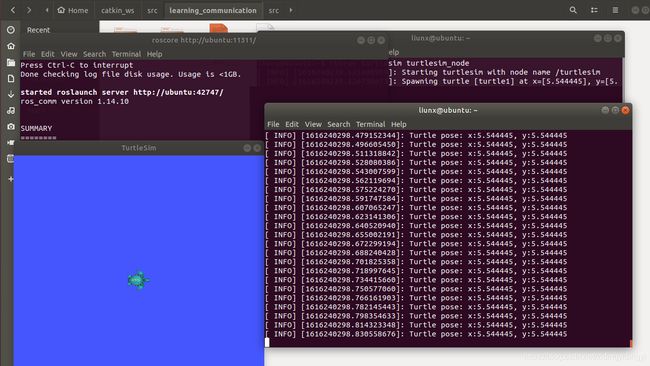
roscore
rosrun turtlesim turtlesim_node
rosrun learning_communication velocity_publisher
创建订阅者
创建订阅者流程:
1、初始化ROS节点
2、订阅需要的 话题
3、循环等待话题消息,接收到消息后进入回调函数
4、在回调函数中完成消息的处理
订阅者代码:
#include 在CMakeLists.txt配置编译规则
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
编译
cd ~/catkin_ws
catkin_make
roscore
rosrun turtlesim turtlesim_node
rosrun learning_topic pose_subscriber
2、服务编程
服务编程流程
1、创建服务端
2、创建客户端
3、添加编译
4、运行可执行程序
创建功能包:
cd ~/catkin_ws/src
catkin_create_pkg learning_service std_msgs rospy roscpp geometry_msgs turtlesim
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
客户端代码:
/**
* 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
*/
#include 添加编译规则:
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${catkin_LIBRARIES})
编译
cd ~/catkin_ws
catkin_make
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_spawn

服务器端代码:
/**
* 该例程将执行/turtle_command服务,服务数据类型std_srvs/Trigger
*/
#include 添加编译规则
add_executable(turtle_command_server src/turtle_command_server.cpp)
target_link_libraries(turtle_command_server ${catkin_LIBRARIES})
编译
cd ~/catkin_ws
catkin_make
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_command_server

二、Rviz工具使用
虚拟机>>可移动设备>>camera>>启动
我们可以看到摄像头点亮

1、安装Rviz
安装相关包
sudo apt-get install ros-melodic-uvc-camera
sudo apt-get install ros-melodic-image-*
sudo apt-get install ros-melodic-rqt-image-view
启动
roscore
启动摄像机节点
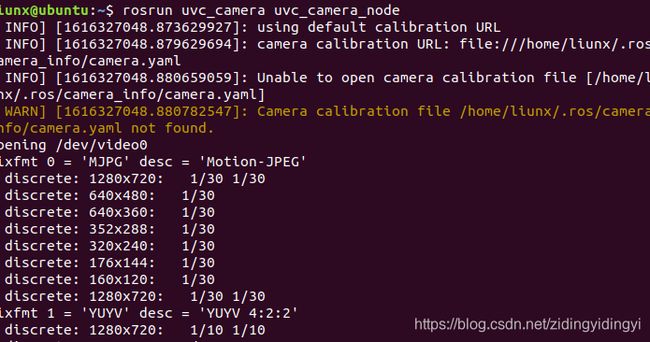
rosrun uvc_camera uvc_camera_node
发生错误不影响摄像机录像
查看话题消息
rostopic list
查看摄像机信息
rostopic echo /camera_info
启动Rviz
rviz
2、Rviz打开摄像头
add添加image。

image Topic设置如下:
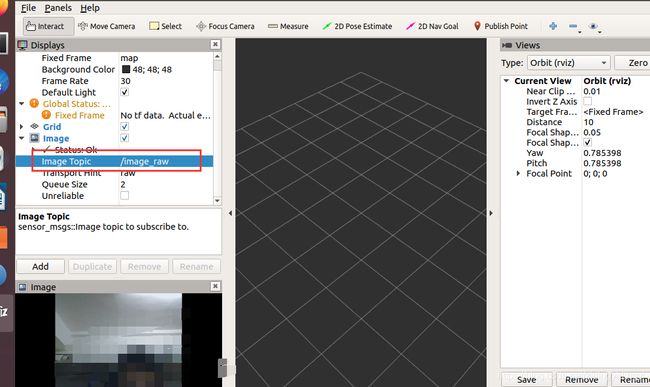
看样子我们是成功完成摄像了!
三、gazebo 仿真
1、URDF机器人搭建
创建机器人建模的功能包
cd ~/catkin_ws/src/
catkin_create_pkg mbot_description urdf xacro
新建文件如下:
 urdf 存放机器人模型的URDF或xacro文件
urdf 存放机器人模型的URDF或xacro文件
meshes 放置URDF中引用的模型渲染文件,机器人外观纹理,让外观和实际更相似
launch 保存相关启动文件
config 保存rviz的配置文件、功能包的配置文件
编辑launch文件
cd ~/catkin_ws/src/mbot_description/launch
sudo gedit display_mbot_base_urdf.launch
内容如下:
<launch>
<!-- 加载的参数名字叫robot_description,具体内容是urdf相关模型的路径 -->
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_base.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面,保存每次打开之后的相关插件,保存到config文件夹下面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
第一步:使用圆柱体创建一个车体模型
cd ~/catkin_ws/src/mbot_description/urdf
sudo gedit mbot_base.urdf
内容如下:
放入文件中需要删除注释,不然会报错,后面一样。
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<!-- link坐标位置,放在最中央 ,xyz单位是米,rpy单位是弧度-->
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<!-- 机器人的外观效果,使用圆柱体,高0.16,半径0.20 -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<!-- 通过rgba来描述颜色,颜色命名为yellow,a为1是不透明-->
</visual>
<!--visual指的是一些物理属性的标签 -->
</link>
</robot>
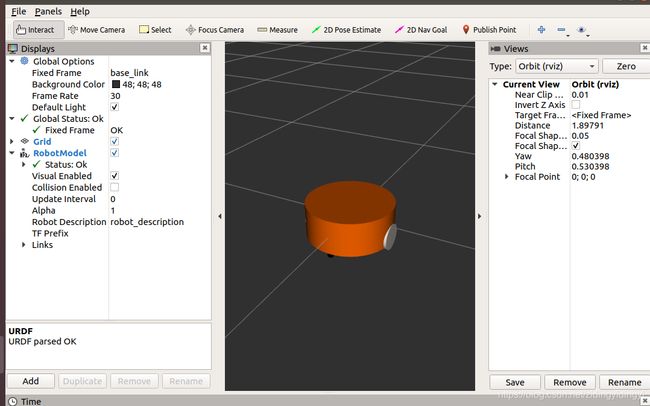
运行代码:
roslaunch mbot_description display_mbot_base_urdf.launch
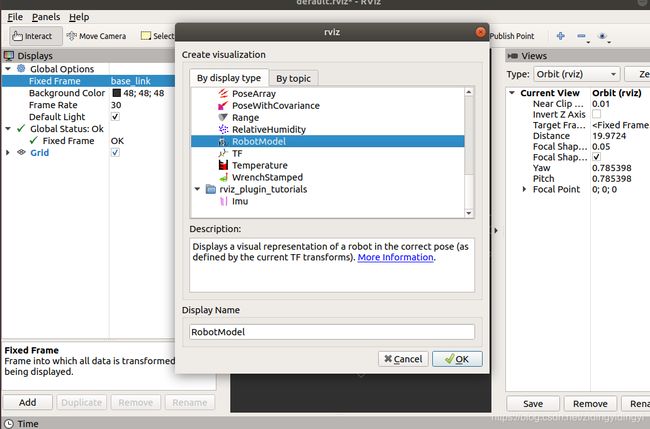
设置Fixed Frame为base_list

在add添加RobotModel
第二步:使用圆柱体创建左轮
在mbot_base.urdf中添加代码
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
第三步:使用圆柱体创建右轮
在mbot_base.urdf中添加代码
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
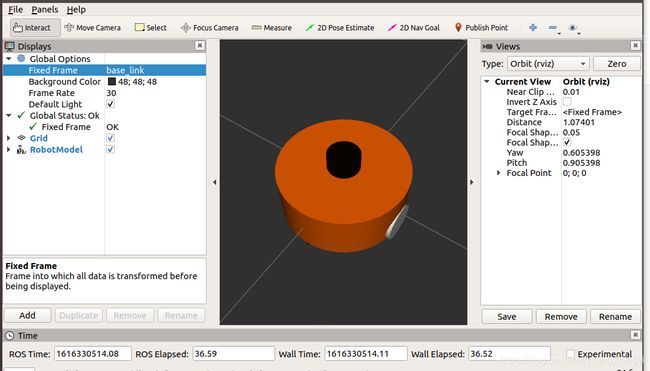
第四步:使用球体创建支撑脚
在mbot_base.urdf中添加代码
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
结果如下:
第五步:创建传感器摄像头
创建文件mbot_with_camera.urdf在前面代码的基础上新增代码如下:
<!--摄像头相关内容-->
<link name="camera_link">
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.03 0.04 0.04" />
<!--外观是个盒子模拟成摄像头,长宽高分别是0.03 0.04 0.04-->
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="camera_joint" type="fixed">
<origin xyz="0.17 0 0.10" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="camera_link"/>
</joint>
创建文件display_mbot_with_camera_urdf.launch在前面launch文件的基础修改urdf文件位置
<launch>
<!-- 加载的参数名字叫robot_description,具体内容是urdf相关模型的路径 -->
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_with_camera.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面,保存每次打开之后的相关插件,保存到config文件夹下面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
运行程序
roslaunch mbot_description display_mbot_with_camera_urdf.launch
结果如下:

第五步:创建传感器激光雷达
创建文件mbot_with_laser.urdf在前面代码的基础上新增代码如下:
<!--激光雷达配置内容-->
<link name="laser_link">
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="laser_joint" type="fixed">
<origin xyz="0 0 0.105" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="laser_link"/>
</joint>
创建文件display_mbot_with_laser_urdf.launch在前面launch文件的基础修改urdf文件位置
<launch>
<!-- 加载的参数名字叫robot_description,具体内容是urdf相关模型的路径 -->
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_with_laser.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面,保存每次打开之后的相关插件,保存到config文件夹下面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
运行程序
roslaunch mbot_description display_mbot_with_laser_urdf.launch
结果如下:
第五步:创建传感器Kinect
创建文件mbot_with_kinect.urdf在前面代码的基础上新增代码如下:
<!--Kinect配置-->
<link name="kinect_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 1.5708"/>
<geometry>
<mesh filename="package://mbot_description/meshes/kinect.dae" />
<!--直接加载Kinect的外观纹理描述文件-->
</geometry>
</visual>
</link>
<joint name="laser_joint" type="fixed">
<origin xyz="0.15 0 0.11" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="kinect_link"/>
</joint>
创建文件display_mbot_with_kinect_urdf.launch在前面launch文件的基础修改urdf文件位置
<launch>
<!-- 加载的参数名字叫robot_description,具体内容是urdf相关模型的路径 -->
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_with_kinect.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面,保存每次打开之后的相关插件,保存到config文件夹下面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
运行程序
roslaunch mbot_description display_mbot_with_kinect_urdf.launch
2、gazebo 仿真器搭建环境
参考Gazebo搭建一个三维虚拟环境 —— 通过Rviz显示机器人camera采集的信息
- 新建gazebo机器人仿真工具包
cd ~/catkin_ws/src
catkin_create_pkg mbot_gazebo std_msgs rospy roscpp
cd ~/catkin_ws
catkin_make
- 创建工程所需文件
cd ~/catkin_ws/src/mbot_gazebo
mkdir launch
cd launch
gedit gazebo_empty.launch
添加内容如下:
<launch>
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_gazebo.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
- 修改CMakeLisets.txt内容
gedit ~/catkin_ws/src/mbot_gazebo/CMakeLists.txt
在find_package中添加
gazebo_plugins
gazebo_ros
gazebo_ros_control
- 修改 package.xml 文件内容
gedit ~/catkin_ws/src/mbot_gazebo/package.xml
添加
<build_depend>gazebo_plugins</build_depend>
<build_depend>gazebo_ros</build_depend>
<build_depend>gazebo_ros_control</build_depend>
<build_export_depend>gazebo_plugins</build_export_depend>
<build_export_depend>gazebo_ros</build_export_depend>
<build_export_depend>gazebo_ros_control</build_export_depend>
<exec_depend>gazebo_plugins</exec_depend>
<exec_depend>gazebo_ros</exec_depend>
<exec_depend>gazebo_ros_control</exec_depend>
- 编译
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
待完成
- 进入gazebo软件
gazebo
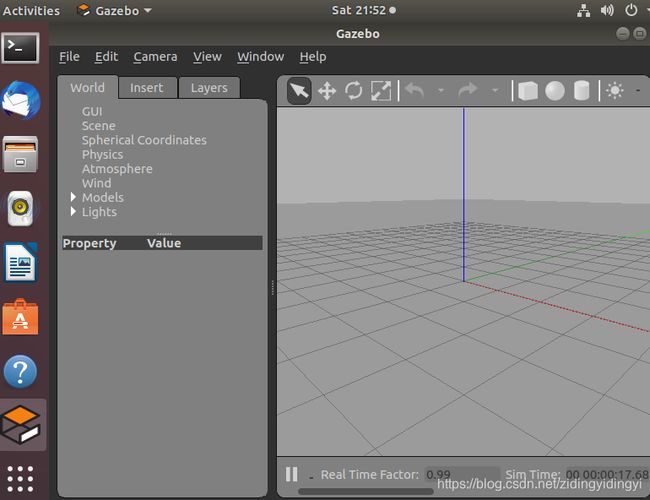
2、点击 Edit ----> Buliding Editor 进入如下界面:

3、设置房间
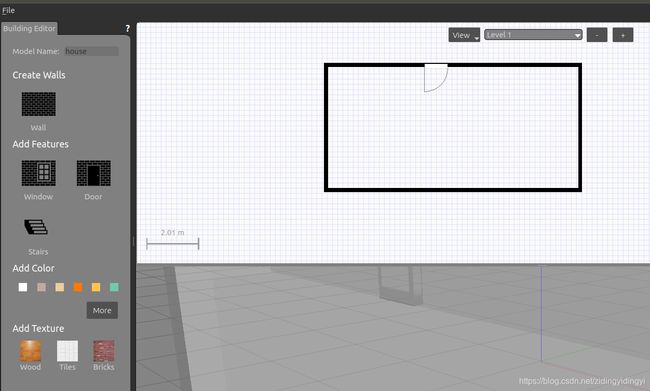 4、退出当前编辑界面,File最下面那个。在Insert,插入建立的模型。
4、退出当前编辑界面,File最下面那个。在Insert,插入建立的模型。

四、参考
B站【古月居】古月 · ROS入门21讲
Gazebo搭建一个三维虚拟环境 —— 通过Rviz显示机器人camera采集的信息