- C++11堆操作深度解析:std::is_heap与std::is_heap_until原理解析与实践
文章目录堆结构基础与函数接口堆的核心性质函数签名与核心接口std::is_heapstd::is_heap_until实现原理深度剖析std::is_heap的验证逻辑std::is_heap_until的定位策略算法优化细节代码实践与案例分析基础用法演示自定义比较器实现最小堆检查边缘情况处理性能分析与实际应用时间复杂度对比典型应用场景与手动实现的对比注意事项与最佳实践迭代器要求比较器设计C++标
- 冒泡、选择、插入排序:三大基础排序算法深度解析(C语言实现)
xienda
算法排序算法数据结构
在算法学习道路上,排序算法是每位程序员必须掌握的基石。本文将深入解析冒泡排序、选择排序和插入排序这三种基础排序算法,通过C语言代码实现和对比分析,帮助读者彻底理解它们的差异与应用场景。算法原理与代码实现1.冒泡排序(BubbleSort)工作原理:通过重复比较相邻元素,将较大元素逐步"冒泡"到数组末尾。voidbubbleSort(intarr[],intn){ for(inti=0;iarr[
- Leetcode 148. 排序链表
文章目录前引题目代码(首刷看题解)代码(8.9二刷部分看解析)代码(9.15三刷部分看解析)前引综合性比较强的一道题,要求时间复杂度必须O(logn)才能通过,最适合链表的排序算法就是归并。这里采用自顶向下的方法步骤:找到链表中点(双指针)对两个子链表排序(递归,直到只有一个结点,记得将子链表最后指向nullptr)归并(引入dummy结点)题目Leetcode148.排序链表代码(首刷看题解)c
- 全面触摸屏输入法设计与实现
长野君
本文还有配套的精品资源,点击获取简介:触摸屏输入法是针对触摸设备优化的文字输入方案,包括虚拟键盘、手写、语音识别和手势等多种输入方式。本方案通过提供主程序文件、用户手册、界面截图、示例图、说明文本和音效文件,旨在为用户提供一个完整的、多样的文字输入体验。开发者通过持续优化算法和用户界面,使用户在无物理键盘环境下也能高效准确地进行文字输入。1.触摸屏输入法概述简介在现代信息技术飞速发展的今天,触摸屏
- FPGA小白到项目实战:Verilog+Vivado全流程通关指南(附光学类岗位技能映射)
阿牛的药铺
算法移植部署fpga开发verilog
FPGA小白到项目实战:Verilog+Vivado全流程通关指南(附光学类岗位技能映射)引言:为什么这个FPGA入门路线能帮你快速上岗?本文设计了一条**"Verilog语法→工具链操作→光学项目实战→岗位技能对标"的阶梯式学习路径。不同于泛泛而谈的FPGA教程,我们聚焦光学类产品开发**核心能力(时序接口设计、图像处理算法移植、高速接口应用),通过3个递进式项目(从LED闪烁到图像边缘检测),
- PyTorch & TensorFlow速成复习:从基础语法到模型部署实战(附FPGA移植衔接)
阿牛的药铺
算法移植部署pytorchtensorflowfpga开发
PyTorch&TensorFlow速成复习:从基础语法到模型部署实战(附FPGA移植衔接)引言:为什么算法移植工程师必须掌握框架基础?针对光学类产品算法FPGA移植岗位需求(如可见光/红外图像处理),深度学习框架是算法落地的"桥梁"——既要用PyTorch/TensorFlow验证算法可行性,又要将训练好的模型(如CNN、目标检测)转换为FPGA可部署的格式(ONNX、TFLite)。本文采用"
- 算法学习笔记:17.蒙特卡洛算法 ——从原理到实战,涵盖 LeetCode 与考研 408 例题
在计算机科学和数学领域,蒙特卡洛算法(MonteCarloAlgorithm)以其独特的随机抽样思想,成为解决复杂问题的有力工具。从圆周率的计算到金融风险评估,从物理模拟到人工智能,蒙特卡洛算法都发挥着不可替代的作用。本文将深入剖析蒙特卡洛算法的思想、解题思路,结合实际应用场景与Java代码实现,并融入考研408的相关考点,穿插图片辅助理解,帮助你全面掌握这一重要算法。蒙特卡洛算法的基本概念蒙特卡
- 算法学习笔记:15.二分查找 ——从原理到实战,涵盖 LeetCode 与考研 408 例题
呆呆企鹅仔
算法学习算法学习笔记考研二分查找
在计算机科学的查找算法中,二分查找以其高效性占据着重要地位。它利用数据的有序性,通过不断缩小查找范围,将原本需要线性时间的查找过程优化为对数时间,成为处理大规模有序数据查找问题的首选算法。二分查找的基本概念二分查找(BinarySearch),又称折半查找,是一种在有序数据集合中查找特定元素的高效算法。其核心原理是:通过不断将查找范围减半,快速定位目标元素。与线性查找逐个遍历元素不同,二分查找依赖
- LeetCode算法题:电话号码的字母组合
吱屋猪_
算法leetcodejava
题目描述:给定一个仅包含数字2-9的字符串,返回所有它能表示的字母组合。答案可以按任意顺序返回。给出数字到字母的映射如下(与电话按键相同)。注意1不对应任何字母。2->"abc"3->"def"4->"ghi"5->"jkl"6->"mno"7->"pqrs"8->"tuv"9->"wxyz"例如,给定digits="23",返回["ad","ae","af","bd","be","bf","cd
- 霍夫变换(Hough Transform)算法原来详解和纯C++代码实现以及OpenCV中的使用示例
点云SLAM
算法图形图像处理算法opencv图像处理与计算机视觉算法直线提取检测目标检测霍夫变换算法
霍夫变换(HoughTransform)是一种经典的图像处理与计算机视觉算法,广泛用于检测图像中的几何形状,例如直线、圆、椭圆等。其核心思想是将图像空间中的“点”映射到参数空间中的“曲线”,从而将形状检测问题转化为参数空间中的峰值检测问题。一、霍夫变换基本思想输入:边缘图像(如经过Canny边缘检测)输出:一组满足几何模型的形状(如直线、圆)关键思想:图像空间中的一个点→参数空间中的一个曲线参数空
- 用OpenCV标定相机内参应用示例(C++和Python)
下面是一个完整的使用OpenCV进行相机内参标定(CameraCalibration)的示例,包括C++和Python两个版本,基于棋盘格图案标定。一、目标:相机标定通过拍摄多张带有棋盘格图案的图像,估计相机的内参:相机矩阵(内参)K畸变系数distCoeffs可选外参(R,T)标定精度指标(如重投影误差)二、棋盘格参数设置(根据自己的棋盘格设置):棋盘格角点数:9x6(内角点,9列×6行);每个
- Java三年经验程序员技术栈全景指南:从前端到架构,对标阿里美团全栈要求
可曾去过倒悬山
java前端架构
Java三年经验程序员技术栈全景指南:从前端到架构,对标阿里美团全栈要求三年经验是Java程序员的分水岭,技术栈深度决定你成为“业务码农”还是“架构师候选人”。本文整合阿里、美团、滴滴等大厂招聘要求,为你绘制可落地的进阶路线。一、Java核心:从语法糖到JVM底层三年经验与初级的核心差异在于系统级理解,大厂面试常考以下能力:JVM与性能调优内存模型(堆外内存、元空间)、GC算法(G1/ZGC适用场
- 被动降噪的概念及编程实现
CodeByte
人工智能算法javascript编程
被动降噪是指通过编程技术和算法,对输入的数据进行处理,以减少或消除其中的噪声。噪声可以是各种形式的干扰,例如来自传感器、通信信号或其他外部源的干扰。在本文中,我们将探讨被动降噪的意义以及如何使用编程来实现这一目标。被动降噪的意义:噪声对数据的准确性和可靠性产生负面影响。在许多应用领域,例如图像处理、音频处理和信号处理中,噪声的存在可能导致数据质量下降,使得后续的分析和处理变得困难。因此,被动降噪技
- 传统检测响应慢?陌讯多模态引擎提速90+FPS实战
2501_92473147
算法计算机视觉目标检测
开篇痛点:实时目标检测在安防监控中的核心挑战在安防监控领域,实时目标检测是保障公共安全的关键技术。然而,传统算法如YOLOv5或开源框架MMDetection常面临两大痛点:误报率高(复杂光照或遮挡场景下检测不稳定)和响应延迟(高分辨率视频流处理FPS低于30)。实测数据显示,城市交通监控系统误报率达15%,导致安保资源浪费;客户反馈表明,延迟超100ms时,目标跟踪可能失效。这些问题源于算法泛化
- 反光衣识别漏检率 30%?陌讯多尺度模型实测优化
在建筑工地、交通指挥等场景中,反光衣是保障作业人员安全的重要装备,对其进行精准识别是智能监控系统的核心功能之一。但传统视觉算法在实际应用中却屡屡碰壁:强光下反光衣易与背景混淆、远距离小目标漏检率高达30%、复杂场景下模型泛化能力不足[实测数据来源:某智慧工地项目2024年Q1日志]。这些问题直接导致安全监控系统预警滞后,给安全生产埋下隐患。一、技术解析:反光衣识别的核心难点与陌讯算法创新反光衣识别
- matlab卷积矩阵绝对值,MATLAB矩阵分析和计算
weixin_39928736
matlab卷积矩阵绝对值
MATLAB矩阵分析和计算编辑锁定讨论上传视频本词条缺少概述图,补充相关内容使词条更完整,还能快速升级,赶紧来编辑吧!《MATLAB矩阵分析和计算》是清华大学出版社出版的一本图书。[1]书名MATLAB矩阵分析和计算作者杜树春出版社清华大学出版社出版时间2019年6月1日定价59元ISBN9787302524816印次1-1印刷日期2019.04.23MATLAB矩阵分析和计算图书内容编辑本书侧重
- 【GESP】C++三级真题 luogu-B4359 [GESP202506 三级] 分糖果
CoderCodingNo
GESPc++java开发语言
GESPC++三级,2025年6月真题,模拟算法,难度★★☆☆☆。本次三级题目个人感觉比较简单。题目题解详见:【GESP】C++三级真题luogu-B4359[GESP202506三级]分糖果|OneCoder【GESP】C++三级真题luogu-B4359[GESP202506三级]分糖果|OneCoderGESPC++三级,2025年6月真题,模拟算法,难度★★☆☆☆。本次三级题目个人感觉比较
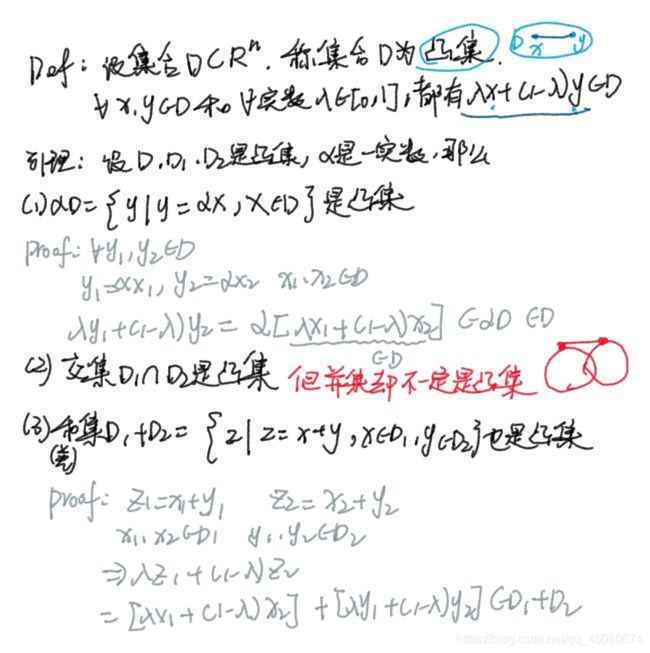
- 【证明】对极几何:本质矩阵内在性质
Powerful_QI
slam线性代数矩阵
--这是目录--1.本质矩阵内在性质表述2.预备知识2.1线性代数基础2.1.1奇异值与特征值的关系2.1.2矩阵加减单位阵后特征值的变化2.2引理:一个常用的矩阵变换3.证明1.本质矩阵内在性质表述 本质矩阵(EssentialMatrix)EEE是一个3阶方阵,满足E=t∧RE=t^{\land}RE=t∧R其中RRR为旋转矩阵,ttt为平移量,t∧t^{\land}t∧运算定义如下(参考了
- 【华为机试】HJ61 放苹果
不爱熬夜的Coder
算法华为机试golang华为golang算法面试
文章目录HJ61放苹果描述输入描述输出描述示例1示例2解题思路算法分析问题本质分析状态定义与转移递推关系详解动态规划表构建算法流程图示例推导过程代码实现思路时间复杂度分析关键优化点边界情况处理递归解法对比实际应用场景测试用例分析算法特点数学原理完整题解代码HJ61放苹果描述我们需要将m个相同的苹果放入n个相同的盘子中,允许有的盘子空着不放。求解有多少种不同的分法。输入描述输入两个整数m,n(0B[
- 深度学习模型表征提取全解析
ZhangJiQun&MXP
教学2024大模型以及算力2021AIpython深度学习人工智能pythonembedding语言模型
模型内部进行表征提取的方法在自然语言处理(NLP)中,“表征(Representation)”指将文本(词、短语、句子、文档等)转化为计算机可理解的数值形式(如向量、矩阵),核心目标是捕捉语言的语义、语法、上下文依赖等信息。自然语言表征技术可按“静态/动态”“有无上下文”“是否融入知识”等维度划分一、传统静态表征(无上下文,词级为主)这类方法为每个词分配固定向量,不考虑其在具体语境中的含义(无法解
- .NET中的安全性之数字签名、数字证书、强签名程序集、反编译
hezudao25
NET.netassembly加密算法referenceheader
本文将探讨数字签名、数字证书、强签名程序集、反编译等以及它们在.NET中的运用(一些概念并不局限于.NET在其它技术、平台中也存在)。1.数字签名数字签名又称为公钥数字签名,或者电子签章等,它借助公钥加密技术实现。数字签名技术主要涉及公钥、私钥、非对称加密算法。1.1公钥与私钥公钥是公开的钥匙,私钥则是与公钥匹配的严格保护的私有密钥;私钥加密的信息只有公钥可以解开,反之亦然。在VisualStud
- LLM的表征做减法的是什么,自然语言是一个矩阵,怎么进行减法的
ZhangJiQun&MXP
教学2024大模型以及算力2021AIpython计算机视觉人工智能机器学习算法深度学习
LLM的表征做减法的是什么,自然语言是一个矩阵,怎么进行减法的有个假设:就是最后一个词语融合了前面词语的信息减法操作主要用于提取模型内部表征中的"诚实性"概念向量。具体来说,这是通过对比诚实和不诚实场景下的模型隐藏状态实现的。importtorchfromtransformersimportAutoModelForCausalLM,AutoTokenizer,AutoConfigimportnum
- 2025年渗透测试面试题总结-2025年HW(护网面试) 43(题目+回答)
独行soc
2025年护网面试职场和发展linux科技渗透测试安全护网
安全领域各种资源,学习文档,以及工具分享、前沿信息分享、POC、EXP分享。不定期分享各种好玩的项目及好用的工具,欢迎关注。目录2025年HW(护网面试)431.自我介绍与职业规划2.Webshell源码级检测方案3.2025年新型Web漏洞TOP54.渗透中的高价值攻击点5.智能Fuzz平台架构设计6.堆栈溢出攻防演进7.插桩技术实战应用8.二进制安全能力矩阵9.C语言内存管理精要10.Pyth
- 数据结构:导论
梁辰兴
数据结构学习笔记数据结构导论算法时间复杂度空间复杂度
目录一,数据结构的研究内容二,基本概念与术语(一)数据、数据元素、数据项与数据对象(二)数据结构(三)数据类型与抽象数据类型️三,抽象数据类型的表示与实现⚙️四,算法与算法分析⚖️(一)算法的定义及特性(二)评价算法优劣的基本标准⏱️(三)算法的时间复杂度(四)算法的空间复杂度章结一,数据结构的研究内容数据结构是计算机科学的核心基础,其研究内容可概括为三大维度:数据组织形式:探索如何将现实世界中的
- C++ 标准库 <numeric>
以下对C++标准库中头文件所提供的数值算法与工具做一次系统、深入的梳理,包括算法功能、示例代码、复杂度分析及实践建议。一、概述中定义了一组对数值序列进行累加、内积、差分、扫描等操作的算法,以及部分辅助工具(如std::iota、std::gcd/std::lcm等)。所有算法均作用于迭代器区间,符合STL风格,可与任意容器或原始数组配合使用。从C++17、20起,又陆续加入了并行友好的std::r
- 具身语义导航算法总揽
Shilong Wang
具身导航算法算法
端到端方法小脑大脑GNMNavDPNaVILAViNTNomadNavidStreamVLNMapNavNavGPTUni-NavidOctoNavNavGPT2模仿学习行为克隆BCDAgger模块化方法GOATVLFMSayPlanLM-NavETPNavVoroNavEmbodiedRAGVL-NavStairwaytoSuccess业内大佬北大王鹤NavidUni-NavidOctoNav吴
- android去除gps漂移代码,GPS漂移过滤算法
扇贝君
GPS漂移过滤算法基本思想:逐点过滤,再经过基础过滤后,进行判断运动状态,静止状态和运动中。如果静止,则使用电子围栏;如果运动,则先过滤大速度,再过滤加速度,然后过滤距离(包括超大距离,和速度相关距离)。对于要过滤的点,采用之前最近的可靠点,进行替换,同时,无效次数+1,如果后面是有效点,则无效次数-1,如果无效次数归0,认为这个点才是真正可靠点(无效次数为正时,都为要被替换的点)。如果遇到不定点
- 项目开发日记
框架整理学习UIMgr:一、数据结构与算法1.1关键数据结构成员变量类型说明m_CtrlsList当前正在显示的所有UI页面m_CachesList已打开过、但现在不显示的页面(缓存池)1.2算法逻辑查找缓存页面:从m_Caches中倒序查找是否已有对应ePageType页面,找到则重用。页面加载:从资源管理器ResMgr加载prefab并绑定控制器/视图组件。页面关闭:从m_Ctrls移除,添加
- 深度学习篇---昇腾NPU&CANN 工具包
Atticus-Orion
上位机知识篇图像处理篇深度学习篇深度学习人工智能NPU昇腾CANN
介绍昇腾NPU是华为推出的神经网络处理器,具有强大的AI计算能力,而CANN工具包则是面向AI场景的异构计算架构,用于发挥昇腾NPU的性能优势。以下是详细介绍:昇腾NPU架构设计:采用达芬奇架构,是一个片上系统,主要由特制的计算单元、大容量的存储单元和相应的控制单元组成。集成了多个CPU核心,包括控制CPU和AICPU,前者用于控制处理器整体运行,后者承担非矩阵类复杂计算。此外,还拥有AICore
- 深度学习图像分类数据集—桃子识别分类
AI街潜水的八角
深度学习图像数据集深度学习分类人工智能
该数据集为图像分类数据集,适用于ResNet、VGG等卷积神经网络,SENet、CBAM等注意力机制相关算法,VisionTransformer等Transformer相关算法。数据集信息介绍:桃子识别分类:['B1','M2','R0','S3']训练数据集总共有6637张图片,每个文件夹单独放一种数据各子文件夹图片统计:·B1:1601张图片·M2:1800张图片·R0:1601张图片·S3:
- PHP如何实现二维数组排序?
IT独行者
二维数组PHP排序
二维数组在PHP开发中经常遇到,但是他的排序就不如一维数组那样用内置函数来的方便了,(一维数组排序可以参考本站另一篇文章【PHP中数组排序函数详解汇总】)。二维数组的排序需要我们自己写函数处理了,这里UncleToo给大家分享一个PHP二维数组排序的函数:
代码:
functionarray_sort($arr,$keys,$type='asc'){
$keysvalue= $new_arr
- 【Hadoop十七】HDFS HA配置
bit1129
hadoop
基于Zookeeper的HDFS HA配置主要涉及两个文件,core-site和hdfs-site.xml。
测试环境有三台
hadoop.master
hadoop.slave1
hadoop.slave2
hadoop.master包含的组件NameNode, JournalNode, Zookeeper,DFSZKFailoverController
- 由wsdl生成的java vo类不适合做普通java vo
darrenzhu
VOwsdlwebservicerpc
开发java webservice项目时,如果我们通过SOAP协议来输入输出,我们会利用工具从wsdl文件生成webservice的client端类,但是这里面生成的java data model类却不适合做为项目中的普通java vo类来使用,当然有一中情况例外,如果这个自动生成的类里面的properties都是基本数据类型,就没问题,但是如果有集合类,就不行。原因如下:
1)使用了集合如Li
- JAVA海量数据处理之二(BitMap)
周凡杨
java算法bitmapbitset数据
路漫漫其修远兮,吾将上下而求索。想要更快,就要深入挖掘 JAVA 基础的数据结构,从来分析出所编写的 JAVA 代码为什么把内存耗尽,思考有什么办法可以节省内存呢? 啊哈!算法。这里采用了 BitMap 思想。
首先来看一个实验:
指定 VM 参数大小: -Xms256m -Xmx540m
- java类型与数据库类型
g21121
java
很多时候我们用hibernate的时候往往并不是十分关心数据库类型和java类型的对应关心,因为大多数hbm文件是自动生成的,但有些时候诸如:数据库设计、没有生成工具、使用原始JDBC、使用mybatis(ibatIS)等等情况,就会手动的去对应数据库与java的数据类型关心,当然比较简单的数据类型即使配置错了也会很快发现问题,但有些数据类型却并不是十分常见,这就给程序员带来了很多麻烦。
&nb
- Linux命令
510888780
linux命令
系统信息
arch 显示机器的处理器架构(1)
uname -m 显示机器的处理器架构(2)
uname -r 显示正在使用的内核版本
dmidecode -q 显示硬件系统部件 - (SMBIOS / DMI)
hdparm -i /dev/hda 罗列一个磁盘的架构特性
hdparm -tT /dev/sda 在磁盘上执行测试性读取操作
cat /proc/cpuinfo 显示C
- java常用JVM参数
墙头上一根草
javajvm参数
-Xms:初始堆大小,默认为物理内存的1/64(<1GB);默认(MinHeapFreeRatio参数可以调整)空余堆内存小于40%时,JVM就会增大堆直到-Xmx的最大限制
-Xmx:最大堆大小,默认(MaxHeapFreeRatio参数可以调整)空余堆内存大于70%时,JVM会减少堆直到 -Xms的最小限制
-Xmn:新生代的内存空间大小,注意:此处的大小是(eden+ 2
- 我的spring学习笔记9-Spring使用工厂方法实例化Bean的注意点
aijuans
Spring 3
方法一:
<bean id="musicBox" class="onlyfun.caterpillar.factory.MusicBoxFactory"
factory-method="createMusicBoxStatic"></bean>
方法二:
- mysql查询性能优化之二
annan211
UNIONmysql查询优化索引优化
1 union的限制
有时mysql无法将限制条件从外层下推到内层,这使得原本能够限制部分返回结果的条件无法应用到内层
查询的优化上。
如果希望union的各个子句能够根据limit只取部分结果集,或者希望能够先排好序在
合并结果集的话,就需要在union的各个子句中分别使用这些子句。
例如 想将两个子查询结果联合起来,然后再取前20条记录,那么mys
- 数据的备份与恢复
百合不是茶
oraclesql数据恢复数据备份
数据的备份与恢复的方式有: 表,方案 ,数据库;
数据的备份:
导出到的常见命令;
参数 说明
USERID 确定执行导出实用程序的用户名和口令
BUFFER 确定导出数据时所使用的缓冲区大小,其大小用字节表示
FILE 指定导出的二进制文
- 线程组
bijian1013
java多线程threadjava多线程线程组
有些程序包含了相当数量的线程。这时,如果按照线程的功能将他们分成不同的类别将很有用。
线程组可以用来同时对一组线程进行操作。
创建线程组:ThreadGroup g = new ThreadGroup(groupName);
&nbs
- top命令找到占用CPU最高的java线程
bijian1013
javalinuxtop
上次分析系统中占用CPU高的问题,得到一些使用Java自身调试工具的经验,与大家分享。 (1)使用top命令找出占用cpu最高的JAVA进程PID:28174 (2)如下命令找出占用cpu最高的线程
top -Hp 28174 -d 1 -n 1
32694 root 20 0 3249m 2.0g 11m S 2 6.4 3:31.12 java
- 【持久化框架MyBatis3四】MyBatis3一对一关联查询
bit1129
Mybatis3
当两个实体具有1对1的对应关系时,可以使用One-To-One的进行映射关联查询
One-To-One示例数据
以学生表Student和地址信息表为例,每个学生都有都有1个唯一的地址(现实中,这种对应关系是不合适的,因为人和地址是多对一的关系),这里只是演示目的
学生表
CREATE TABLE STUDENTS
(
- C/C++图片或文件的读写
bitcarter
写图片
先看代码:
/*strTmpResult是文件或图片字符串
* filePath文件需要写入的地址或路径
*/
int writeFile(std::string &strTmpResult,std::string &filePath)
{
int i,len = strTmpResult.length();
unsigned cha
- nginx自定义指定加载配置
ronin47
进入 /usr/local/nginx/conf/include 目录,创建 nginx.node.conf 文件,在里面输入如下代码:
upstream nodejs {
server 127.0.0.1:3000;
#server 127.0.0.1:3001;
keepalive 64;
}
server {
liste
- java-71-数值的整数次方.实现函数double Power(double base, int exponent),求base的exponent次方
bylijinnan
double
public class Power {
/**
*Q71-数值的整数次方
*实现函数double Power(double base, int exponent),求base的exponent次方。不需要考虑溢出。
*/
private static boolean InvalidInput=false;
public static void main(
- Android四大组件的理解
Cb123456
android四大组件的理解
分享一下,今天在Android开发文档-开发者指南中看到的:
App components are the essential building blocks of an Android
- [宇宙与计算]涡旋场计算与拓扑分析
comsci
计算
怎么阐述我这个理论呢? 。。。。。。。。。
首先: 宇宙是一个非线性的拓扑结构与涡旋轨道时空的统一体。。。。
我们要在宇宙中寻找到一个适合人类居住的行星,时间非常重要,早一个刻度和晚一个刻度,这颗行星的
- 同一个Tomcat不同Web应用之间共享会话Session
cwqcwqmax9
session
实现两个WEB之间通过session 共享数据
查看tomcat 关于 HTTP Connector 中有个emptySessionPath 其解释如下:
If set to true, all paths for session cookies will be set to /. This can be useful for portlet specification impleme
- springmvc Spring3 MVC,ajax,乱码
dashuaifu
springjquerymvcAjax
springmvc Spring3 MVC @ResponseBody返回,jquery ajax调用中文乱码问题解决
Spring3.0 MVC @ResponseBody 的作用是把返回值直接写到HTTP response body里。具体实现AnnotationMethodHandlerAdapter类handleResponseBody方法,具体实
- 搭建WAMP环境
dcj3sjt126com
wamp
这里先解释一下WAMP是什么意思。W:windows,A:Apache,M:MYSQL,P:PHP。也就是说本文说明的是在windows系统下搭建以apache做服务器、MYSQL为数据库的PHP开发环境。
工欲善其事,必须先利其器。因为笔者的系统是WinXP,所以下文指的系统均为此系统。笔者所使用的Apache版本为apache_2.2.11-
- yii2 使用raw http request
dcj3sjt126com
http
Parses a raw HTTP request using yii\helpers\Json::decode()
To enable parsing for JSON requests you can configure yii\web\Request::$parsers using this class:
'request' =&g
- Quartz-1.8.6 理论部分
eksliang
quartz
转载请出自出处:http://eksliang.iteye.com/blog/2207691 一.概述
基于Quartz-1.8.6进行学习,因为Quartz2.0以后的API发生的非常大的变化,统一采用了build模式进行构建;
什么是quartz?
答:简单的说他是一个开源的java作业调度框架,为在 Java 应用程序中进行作业调度提供了简单却强大的机制。并且还能和Sp
- 什么是POJO?
gupeng_ie
javaPOJO框架Hibernate
POJO--Plain Old Java Objects(简单的java对象)
POJO是一个简单的、正规Java对象,它不包含业务逻辑处理或持久化逻辑等,也不是JavaBean、EntityBean等,不具有任何特殊角色和不继承或不实现任何其它Java框架的类或接口。
POJO对象有时也被称为Data对象,大量应用于表现现实中的对象。如果项目中使用了Hiber
- jQuery网站顶部定时折叠广告
ini
JavaScripthtmljqueryWebcss
效果体验:http://hovertree.com/texiao/jquery/4.htmHTML文件代码:
<!DOCTYPE html>
<html xmlns="http://www.w3.org/1999/xhtml">
<head>
<title>网页顶部定时收起广告jQuery特效 - HoverTree<
- Spring boot内嵌的tomcat启动失败
kane_xie
spring boot
根据这篇guide创建了一个简单的spring boot应用,能运行且成功的访问。但移植到现有项目(基于hbase)中的时候,却报出以下错误:
SEVERE: A child container failed during start
java.util.concurrent.ExecutionException: org.apache.catalina.Lif
- leetcode: sort list
michelle_0916
Algorithmlinked listsort
Sort a linked list in O(n log n) time using constant space complexity.
====analysis=======
mergeSort for singly-linked list
====code======= /**
* Definition for sin
- nginx的安装与配置,中途遇到问题的解决
qifeifei
nginx
我使用的是ubuntu13.04系统,在安装nginx的时候遇到如下几个问题,然后找思路解决的,nginx 的下载与安装
wget http://nginx.org/download/nginx-1.0.11.tar.gz
tar zxvf nginx-1.0.11.tar.gz
./configure
make
make install
安装的时候出现
- 用枚举来处理java自定义异常
tcrct
javaenumexception
在系统开发过程中,总少不免要自己处理一些异常信息,然后将异常信息变成友好的提示返回到客户端的这样一个过程,之前都是new一个自定义的异常,当然这个所谓的自定义异常也是继承RuntimeException的,但这样往往会造成异常信息说明不一致的情况,所以就想到了用枚举来解决的办法。
1,先创建一个接口,里面有两个方法,一个是getCode, 一个是getMessage
public
- erlang supervisor分析
wudixiaotie
erlang
当我们给supervisor指定需要创建的子进程的时候,会指定M,F,A,如果是simple_one_for_one的策略的话,启动子进程的方式是supervisor:start_child(SupName, OtherArgs),这种方式可以根据调用者的需求传不同的参数给需要启动的子进程的方法。和最初的参数合并成一个数组,A ++ OtherArgs。那么这个时候就有个问题了,既然参数不一致,那