天球坐标系和地球坐标系
简介
物体在空间的位置、运动速度和运动轨迹等都需要在一定的坐标系中来加以描述。选择的坐标系统不同, 描述上述运动状态的难易程度也会有很大的差别。坐标系统是由一系列的原则、规定, 从理论上来加以定义的, 其具体的实现则称为坐标框架或参考框架。需要说明的是, 当我们讨论的重点不是放在理论上的规定还是具体实现这一问题上时,有时并不对它们加以严格区分。为了能深人地理解各种天球坐标系, 首先需要介绍有关岁差和章动的其本概念。
1. 天球坐标系
1.1 岁差
由于天球赤道和天球黄道的长期运动而导致的春分点 (天球赤道和天球黄道的一个交点) 的进动称为岁差。其中由于天球赤道的长期运动而引起的岁差称为赤道岁差; 由于天球黄道的长期运动而产生的岁差称为黄道岁差。赤道岁差原来一直被称作日、月岁差, 而黄道岁差则一直被称为行星岁差。由于沿用了一百多年的术语“日、月岁差”和“行星岁差”并不准确, 容易引起误解, 所以第 26 届 IAU 大会决定采用 Fukushima 的建议, 将它们分别改称为赤道岁差和黄道岁差。
(1) 赤道岁差
由于太阳、月球以及行星对地球上赤道隆起部分的作用力矩而引起天球赤道的进动, 最终导致春分点每年在黄道上向西移动约 50.39"的现象称为赤道岁差。
(2) 黄道岁差
由于行星的万有引力而导致地月系质心绕日公转平面 (黄道面) 发生变化, 从而导致春分点在天球赤道上每年向东运动约 0. 1 ′ ′ 0.1^{\prime \prime} 0.1′′ 的现象称为黄道岁差。黄道面的变化还将使黄赤交角每年减小约 0.4 7 ′ ′ 0.47^{\prime \prime} 0.47′′ 。
(3)总岁差和岁差模型
赤道岁差和黄道岁差在黄道上的分量之和称为总岁差。换言之, 在赤道岁差和黄道岁差的共同作用下, 天体的黄经将发生变化, 其变化量 l l l 可写为:
l = Ψ ′ − λ ′ cos ε l=\Psi^{\prime}-\lambda^{\prime} \cos \varepsilon l=Ψ′−λ′cosε
式中, Ψ ′ \Psi^{\prime} Ψ′ 为由于赤道岁差而引起的春分点在黄道上向西移动的量; λ ′ \lambda^{\prime} λ′ 为由于黄道岁差而引起的春分点在赤道上向东移动的量; ε \varepsilon ε 为黄赤交角。
迄今为止,在全球已相继建立了多个岁差模型, 如 IAU 1976 年岁差模型 (L77 模型)、 IAU 2000 岁差模型、IAU 2006 岁差模型 (P03) 模型, 以及由 Bretagnon 等人建立的 B03 模 型、由 Fukushima 建立的 F03 模型等。在 2006 年第 26 届 IAU 大会上, 决定从 2009 年 1 月 1 日起正式采用 IAU 2006 岁差模型。
(4) 岁差改正
如果我们用下列方法来组成一个瞬时的天球坐标系: 以天球中心作为坐标原点, X X X 轴指向瞬时的平春分点, Z Z Z 轴指向瞬时的平北天极, Y Y Y 轴垂直于 X X X 轴和 Z Z Z 轴形成一个右手直角坐 标系,那么由于岁差的原因,这些瞬时天球坐标系的三个坐标轴的指向就会各不相同。空间的某一固定目标,如无自行的某一恒星,在不同的瞬时天球坐标系中的坐标也各不相同, 无法相互进行比较。为此,我们要选择一个固定的天球坐标系作为基准,将不同观测时刻 t i t_i ti 所测得的天球坐标都归算到该固定的天球坐标系中去进行相互比较, 编制天体的星历。这一固定的天球坐标系被称为协议天球坐标系。目前, 我们选用 J2000.0 时刻的平天球坐标系作为协议天球坐标系。图中的 O − γ 0 y 0 p 0 O-\gamma_0 y_0 p_0 O−γ0y0p0 即为协议天球坐标系, 其 X X X 轴指向 J2000.0 时的平春分点 γ 0 , Z \gamma_0, Z γ0,Z 轴指向 J 2000.0 \mathrm{J} 2000.0 J2000.0 时的平北天极 p 0 , Y p_0, Y p0,Y 轴垂直于 X 、 Z X 、 Z X、Z 轴组成右手坐标系。岁差改正示意图:
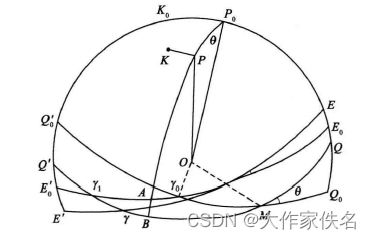
欲将任一时刻 t i t_i ti 的观测值归算到协议天球坐标系中去时,可采用多种方法,最简单的方 法是采用坐标系旋转的方法。从图中可以看出, 要把 t i t_i ti 时刻的瞬时天球坐标系 O − γ y p O-\gamma y p O−γyp 转换到 t 0 t_0 t0 时刻的协议天球坐标系 O − γ 0 y 0 P 0 O-\gamma_0 y_0 P_0 O−γ0y0P0, 只需进行三次坐标旋转即可。首先是绕 Z Z Z 轴旋转 ζ \zeta ζ 角,使 X X X 轴从 γ \gamma γ 指向 B B B; 其次是绕 Y Y Y 轴旋转 θ \theta θ 角, 使 Z Z Z 轴从 O p O_p Op 转为 O p 0 , X O p_0, X Op0,X 轴从 B B B 转为指 向 A A A; 最后再绕 Z Z Z 轴旋转 η 0 \eta_0 η0 角, 使 X X X 轴从 A A A 转为指向 γ 0 \gamma_0 γ0 。 F是有:
( X Y Z ) t 0 = R Z ( η 0 ) R Y ( − θ ) R Z ( ζ ) ( X Y Z ) t i = ( cos η 0 sin η 0 0 − sin η 0 cos η 0 0 0 0 1 ) ( cos θ 0 sin θ 0 1 0 − sin θ 0 cos θ ) ( cos ζ sin ζ 0 − sin ζ cos ζ 0 0 0 1 ) ( X Y Z ) t i = ( p 11 p 12 p 13 p 21 p 22 p 23 p 31 p 32 p 33 ) ( X Y Z ) L i X = [ p ] ( Y Y Z ) t i \begin{aligned} &\left(\begin{array}{l} X \\ Y \\ Z \end{array}\right)_{t_0}=\boldsymbol{R}_Z\left(\eta_0\right) \boldsymbol{R}_Y(-\theta) \boldsymbol{R}_Z(\zeta)\left(\begin{array}{l} X \\ Y \\ Z \end{array}\right)_{t_i} \\ &=\left(\begin{array}{ccc} \cos \eta_0 & \sin \eta_0 & 0 \\ -\sin \eta_0 & \cos \eta_0 & 0 \\ 0 & 0 & 1 \end{array}\right)\left(\begin{array}{ccc} \cos \theta & 0 & \sin \theta \\ 0 & 1 & 0 \\ -\sin \theta & 0 & \cos \theta \end{array}\right)\left(\begin{array}{ccc} \cos \zeta & \sin \zeta & 0 \\ -\sin \zeta & \cos \zeta & 0 \\ 0 & 0 & 1 \end{array}\right)\left(\begin{array}{l} X \\ Y \\ Z \end{array}\right)_{t_i} \\ &=\left(\begin{array}{lll} p_{11} & p_{12} & p_{13} \\ p_{21} & p_{22} & p_{23} \\ p_{31} & p_{32} & p_{33} \end{array}\right)\left(\begin{array}{l} X \\ Y \\ Z \end{array}\right)_{L_i}^X=[p]\left(\begin{array}{c} Y \\ Y \\ Z \end{array}\right)_{t_i} \end{aligned} ⎝ ⎛XYZ⎠ ⎞t0=RZ(η0)RY(−θ)RZ(ζ)⎝ ⎛XYZ⎠ ⎞ti=⎝ ⎛cosη0−sinη00sinη0cosη00001⎠ ⎞⎝ ⎛cosθ0−sinθ010sinθ0cosθ⎠ ⎞⎝ ⎛cosζ−sinζ0sinζcosζ0001⎠ ⎞⎝ ⎛XYZ⎠ ⎞ti=⎝ ⎛p11p21p31p12p22p32p13p23p33⎠ ⎞⎝ ⎛XYZ⎠ ⎞LiX=[p]⎝ ⎛YYZ⎠ ⎞ti
式中, [ p ] [\boldsymbol{p}] [p] 称为岁差矩阵, 它的 9 个元素分别为:
{ p 11 = cos η 0 cos θ cos ζ − sin η 0 sin ζ p 12 = cos η 0 cos θ sin ζ + sin η 0 cos ζ p 13 = cos η 0 sin θ p 21 = − sin η 0 cos θ cos ζ − cos η 0 sin ζ p 22 = − sin η 0 cos θ sin ζ + cos η 0 cos ζ p 23 = − sin η 0 sin θ p 31 = − sin θ cos ζ p 32 = − sin θ sin ζ p 33 = cos θ \left\{\begin{array}{l} p_{11}=\cos \eta_0 \cos \theta \cos \zeta-\sin \eta_0 \sin \zeta \\ p_{12}=\cos \eta_0 \cos \theta \sin \zeta+\sin \eta_0 \cos \zeta \\ p_{13}=\cos \eta_0 \sin \theta \\ p_{21}=-\sin \eta_0 \cos \theta \cos \zeta-\cos \eta_0 \sin \zeta \\ p_{22}=-\sin \eta_0 \cos \theta \sin \zeta+\cos \eta_0 \cos \zeta \\ p_{23}=-\sin \eta_0 \sin \theta \\ p_{31}=-\sin \theta \cos \zeta \\ p_{32}=-\sin \theta \sin \zeta \\ p_{33}=\cos \theta \end{array}\right. ⎩ ⎨ ⎧p11=cosη0cosθcosζ−sinη0sinζp12=cosη0cosθsinζ+sinη0cosζp13=cosη0sinθp21=−sinη0cosθcosζ−cosη0sinζp22=−sinη0cosθsinζ+cosη0cosζp23=−sinη0sinθp31=−sinθcosζp32=−sinθsinζp33=cosθ
反之,从协议天球坐标系转换至任意时刻 t i t_i ti 的天球坐标系时, 有下列关系式:
( X Y Z ) y i = [ p ] − 1 ( X Y Z ) t 0 [ p ] − 1 = R Z ( − ζ ) R γ ( θ ) R Z ( − η 0 ) = ( p 11 ′ p 12 ′ p 13 ′ p 21 ′ p 22 ′ p 23 ′ p 31 ′ p 32 ′ p 33 ′ ) \begin{gathered} \left(\begin{array}{c} X \\ Y \\ Z \end{array}\right)_{y_i}=[\boldsymbol{p}]^{-1}\left(\begin{array}{l} X \\ Y \\ Z \end{array}\right)_{t_0} \\ {[\boldsymbol{p}]^{-1}=\boldsymbol{R}_Z(-\zeta) \boldsymbol{R}_\gamma(\theta) \boldsymbol{R}_Z\left(-\eta_0\right)=\left(\begin{array}{lll} p_{11}^{\prime} & p_{12}^{\prime} & p_{13}^{\prime} \\ p_{21}^{\prime} & p_{22}^{\prime} & p_{23}^{\prime} \\ p_{31}^{\prime} & p_{32}^{\prime} & p_{33}^{\prime} \end{array}\right)} \end{gathered} ⎝ ⎛XYZ⎠ ⎞yi=[p]−1⎝ ⎛XYZ⎠ ⎞t0[p]−1=RZ(−ζ)Rγ(θ)RZ(−η0)=⎝ ⎛p11′p21′p31′p12′p22′p32′p13′p23′p33′⎠ ⎞
式中,
{ p 11 ′ = cos η 0 cos θ cos ζ − sin η 0 sin ζ p 12 ′ = − sin η 0 cos θ cos ζ − cos η 0 sin ζ p 13 ′ = − sin θ cos ζ p 21 ′ = cos η 0 cos θ sin ζ + sin η 0 cos ζ p 22 ′ = − sin η 0 cos θ sin ζ + cos η 0 cos ζ p 23 ′ = − sin θ sin ζ p 31 ′ = cos η 0 sin θ p 32 ′ = − sin η 0 sin θ p 33 ′ = cos θ \left\{\begin{array}{l} p_{11}^{\prime}=\cos \eta_0 \cos \theta \cos \zeta-\sin \eta_0 \sin \zeta \\ p_{12}^{\prime}=-\sin \eta_0 \cos \theta \cos \zeta-\cos \eta_0 \sin \zeta \\ p_{13}^{\prime}=-\sin \theta \cos \zeta \\ p_{21}^{\prime}=\cos \eta_0 \cos \theta \sin \zeta+\sin \eta_0 \cos \zeta \\ p_{22}^{\prime}=-\sin \eta_0 \cos \theta \sin \zeta+\cos \eta_0 \cos \zeta \\ p_{23}^{\prime}=-\sin \theta \sin \zeta \\ p_{31}^{\prime}=\cos \eta_0 \sin \theta \\ p_{32}^{\prime}=-\sin \eta_0 \sin \theta \\ p_{33}^{\prime}=\cos \theta \end{array}\right. ⎩ ⎨ ⎧p11′=cosη0cosθcosζ−sinη0sinζp12′=−sinη0cosθcosζ−cosη0sinζp13′=−sinθcosζp21′=cosη0cosθsinζ+sinη0cosζp22′=−sinη0cosθsinζ+cosη0cosζp23′=−sinθsinζp31′=cosη0sinθp32′=−sinη0sinθp33′=cosθ
岁差参数 η 0 、 ζ 、 θ \eta_0 、 \zeta 、 \theta η0、ζ、θ 可用岁差模型求得。IAU 2006 岁差模型给出计算公式如下:
η 0 = 2.65054 5 ′ ′ + 2306.08322 7 ′ ′ t + 0.298849 9 ′ ′ t 2 + 0.01801828 t 3 − 5.97 1 ′ ′ × 1 0 − 6 t 4 − 3.17 3 ′ ′ × 1 0 − 7 t 5 ζ = − 2.65054 5 ′ ′ + 2306.07718 1 ′ ′ t + 1.0927348 t 2 + 0.01826837 t 3 + 2.859 6 ′ ′ × 1 0 − 5 t 4 − 2.90 4 ′ ′ × 1 0 − 7 t 5 θ = 2004.19190 3 ′ ′ t − 0.429493 4 ′ ′ t 2 − 0.0418226 4 ′ ′ t 3 − 7.08 9 ′ ′ × 1 0 − 6 t 4 − 1.27 4 ′ ′ × 1 0 − 7 t 5 \begin{aligned} \eta_0=& 2.650545^{\prime \prime}+2306.083227^{\prime \prime} t+0.2988499^{\prime \prime} t^2+0.01801828 t^3 \\ &-5.971^{\prime \prime} \times 10^{-6} t^4-3.173^{\prime \prime} \times 10^{-7} t^5 \\ \zeta=&-2.650545^{\prime \prime}+2306.077181^{\prime \prime} t+1.0927348 t^2+0.01826837 t^3 \\ &+2.8596^{\prime \prime} \times 10^{-5} t^4-2.904^{\prime \prime} \times 10^{-7} t^5 \\ \theta=& 2004.191903^{\prime \prime} t-0.4294934^{\prime \prime} t^2-0.04182264^{\prime \prime} t^3-7.089^{\prime \prime} \times 10^{-6} t^4 \\ &-1.274^{\prime \prime} \times 10^{-7} t^5 \end{aligned} η0=ζ=θ=2.650545′′+2306.083227′′t+0.2988499′′t2+0.01801828t3−5.971′′×10−6t4−3.173′′×10−7t5−2.650545′′+2306.077181′′t+1.0927348t2+0.01826837t3+2.8596′′×10−5t4−2.904′′×10−7t52004.191903′′t−0.4294934′′t2−0.04182264′′t3−7.089′′×10−6t4−1.274′′×10−7t5
式中, t t t 为离参考时刻 J 2000.0 \mathrm{J} 2000.0 J2000.0 的儒略世纪数。从理论上讲,计算多差时应采用 TDB 时间, 但实际上总是使用 TT 时间,因为这两种时间系统之间的最大差异仅为 1.7 m s 1.7 \mathrm{~ms} 1.7 ms, 对岁差的影响只有 2. 7 ′ ′ × 1 0 − 9 2.7^{\prime \prime} \times 10^{-9} 2.7′′×10−9, 可忽略不计。
1.2 章动
(1)章动的基本概念
由于月球、太阳和各大行星与地球间的相对位置存在周期性的变化, 因此作用在地球赤道隆起部分的力矩也在发生变化,地月系质心绕日公转的轨道面也存在周期性的摄动, 因此,在岁差的基础上还存在各种大小和周期各不相同的微小的周期性变化一一章动。其中 最主要的一项是幅度为 9. 2 ′ ′ 9.2^{\prime \prime} 9.2′′ (交角章动), 周期为 18.6 18.6 18.6 年的周期项。这是由于月球绕地球的公转轨道面一一白道平面与地球赤道平面之间的交角会以 18.6 18.6 18.6 年的周期在 1 8 ∘ 1 7 ′ 18^{\circ} 17^{\prime} 18∘17′ 至 2 8 ∘ 3 5 ′ 28^{\circ} 35^{\prime} 28∘35′ 之间来回变化而引起的。
(2) 章动模型
至今已建立了许多章动模型, 如 IAU 1980 年章动模型、IAU 2000 年章动模型等。目前被广泛使用的是 IAU 2000 章动模型,该模型是由日、月章动和行星章动两部分组成的,其中 日、月章动是由 678 个不同幅度、不同周期的周期项组成的,而行星章动则是由 687 个不同幅度、不同周期的周期项组成的。
- 日、月章动
{ Δ Ψ = ∑ i = 1 678 [ ( A i + A i ′ t ) sin f i + ( A i ′ ′ + A i ′ ′ ′ t ) cos f i ] Δ ε = ∑ i = 1 678 [ ( B i + B i ′ t ) cos f i + ( B i ′ ′ + B i ′ ′ ′ t ) sin f i ] \left\{\begin{array}{l} \Delta \Psi=\sum_{i=1}^{678}\left[\left(A_i+A_i^{\prime} t\right) \sin f_i+\left(A_i^{\prime \prime}+A_i^{\prime \prime \prime} t\right) \cos f_i\right] \\ \Delta \varepsilon=\sum_{i=1}^{678}\left[\left(B_i+B_i^{\prime} t\right) \cos f_i+\left(B_i^{\prime \prime}+B_i^{\prime \prime \prime} t\right) \sin f_i\right] \end{array}\right. {ΔΨ=∑i=1678[(Ai+Ai′t)sinfi+(Ai′′+Ai′′′t)cosfi]Δε=∑i=1678[(Bi+Bi′t)cosfi+(Bi′′+Bi′′′t)sinfi]
式中, Δ Ψ \Delta \Psi ΔΨ 为黄经章动, 是由于章动而导致黄经的变化量; Δ ε \Delta \varepsilon Δε 为交角章动, 是由于章动而导 致的共赤交角 ε \varepsilon ε 的变化量; A i 、 A i ′ 、 A i ′ ′ 、 A i ′ ′ ′ A_i 、 A_i^{\prime} 、 A_i^{\prime \prime} 、 A_i^{\prime \prime \prime} Ai、Ai′、Ai′′、Ai′′′ 以及 B i 、 B i ′ 、 B i ′ ′ 、 B i ′ ′ B_i 、 B_i^{\prime} 、 B_i^{\prime \prime} 、 B_i^{\prime \prime} Bi、Bi′、Bi′′、Bi′′ 由表格给出; t t t 为离参考时刻 J 2000.0 \mathrm{J} 2000.0 J2000.0 的儒略世纪数。
f i = N 1 I + N 2 I ′ + N 3 F + N 4 D + N 5 Ω f_i=N_1 I+N_2 I^{\prime}+N_3 F+N_4 D+N_5 \Omega fi=N1I+N2I′+N3F+N4D+N5Ω
式中, N 1 , N 2 , N 3 , N 4 , N 5 N_1, N_2, N_3, N_4, N_5 N1,N2,N3,N4,N5 的值也是由表格给出; I , I ′ , F , D , Ω I, I^{\prime}, F, D, \Omega I,I′,F,D,Ω 则是与太阳、月球的位置相 关的一些参数, 有固定的计算公式进行计算。 - 行星章动
{ Δ Ψ = ∑ i = 1 687 ( A i sin f i + A i ′ cos f i ) Δ ε = ∑ i = 1 667 ( B i cos f i + B i ′ sin f i ) \left\{\begin{array}{l}\Delta \Psi=\sum_{i=1}^{687}\left(A_i \sin f_i+A_i^{\prime} \cos f_i\right) \\ \Delta \varepsilon=\sum_{i=1}^{667}\left(B_i \cos f_i+B_i^{\prime} \sin f_i\right)\end{array}\right. {ΔΨ=∑i=1687(Aisinfi+Ai′cosfi)Δε=∑i=1667(Bicosfi+Bi′sinfi) 是与各大行星的位置相关的参数, 有固定公式计算。
上述章动模型的精度优于 0.2 m a s 0.2 \mathrm{mas} 0.2mas, 对于精度要求仅为 1 m a s 1 \mathrm{mas} 1mas 的用户来说, 则可以使用简化后的公式来计算, 精确的模型称为 IAU 2000 A 2000 \mathrm{~A} 2000 A 章动模型, 简化后的模型则称为 IAU 2000B 模型。在 B B B 模型中, 只含 77 个日、月章动项和 1 个行星章动偏差项。对于 GPS 卫星来说, 1 m a s 1 \mathrm{mas} 1mas 会引起约 13 c m 13 \mathrm{~cm} 13 cm 的卫星位置误差。
(3) 章动改正
下面我们不加推导椧出章动改正公式, 如下:
[ N ] = R γ ( − ε − Δ ε ) ⋅ R Z ( − Δ ψ ) ⋅ R x ( ε ) = ( n 11 n 12 n 13 n 21 n 22 n 23 n 31 n 32 n 33 ) [N]=\boldsymbol{R}_\gamma(-\varepsilon-\Delta \varepsilon) \cdot \boldsymbol{R}_Z(-\Delta \psi) \cdot \boldsymbol{R}_x(\varepsilon)=\left(\begin{array}{lll}n_{11} & n_{12} & n_{13} \\ n_{21} & n_{22} & n_{23} \\ n_{31} & n_{32} & n_{33}\end{array}\right) [N]=Rγ(−ε−Δε)⋅RZ(−Δψ)⋅Rx(ε)=⎝ ⎛n11n21n31n12n22n32n13n23n33⎠ ⎞
式中,
{ n 11 = cos Δ ψ n 12 = − sin Δ ψ cos ε n 13 = − sin Δ ψ sin ε n 21 = sin Δ ψ cos ( ε + Δ ε ) n 22 = cos Δ ψ cos ε cos ( ε + Δ ε ) + sin ε sin ( ε + Δ ε ) n 23 = cos Δ ψ sin ε cos ( ε + Δ ε ) − cos ε sin ( ε + Δ ε ) n 31 = sin Δ ψ sin ( ε + Δ ε ) n 32 = cos Δ ψ cos ε sin ( ε + Δ ε ) − sin ε cos ( ε + Δ ε ) n 33 = cos Δ ψ sin ε sin ( ε + Δ ε ) + cos ε cos ( ε + Δ ε ) \left\{\begin{array}{l}n_{11}=\cos \Delta \psi \\ n_{12}=-\sin \Delta \psi \cos \varepsilon \\ n_{13}=-\sin \Delta \psi \sin \varepsilon \\ n_{21}=\sin \Delta \psi \cos (\varepsilon+\Delta \varepsilon) \\ n_{22}=\cos \Delta \psi \cos \varepsilon \cos (\varepsilon+\Delta \varepsilon)+\sin \varepsilon \sin (\varepsilon+\Delta \varepsilon) \\ n_{23}=\cos \Delta \psi \sin \varepsilon \cos (\varepsilon+\Delta \varepsilon)-\cos \varepsilon \sin (\varepsilon+\Delta \varepsilon) \\ n_{31}=\sin \Delta \psi \sin (\varepsilon+\Delta \varepsilon) \\ n_{32}=\cos \Delta \psi \cos \varepsilon \sin (\varepsilon+\Delta \varepsilon)-\sin \varepsilon \cos (\varepsilon+\Delta \varepsilon) \\ n_{33}=\cos \Delta \psi \sin \varepsilon \sin (\varepsilon+\Delta \varepsilon)+\cos \varepsilon \cos (\varepsilon+\Delta \varepsilon)\end{array}\right. ⎩ ⎨ ⎧n11=cosΔψn12=−sinΔψcosεn13=−sinΔψsinεn21=sinΔψcos(ε+Δε)n22=cosΔψcosεcos(ε+Δε)+sinεsin(ε+Δε)n23=cosΔψsinεcos(ε+Δε)−cosεsin(ε+Δε)n31=sinΔψsin(ε+Δε)n32=cosΔψcosεsin(ε+Δε)−sinεcos(ε+Δε)n33=cosΔψsinεsin(ε+Δε)+cosεcos(ε+Δε)
1.3 天球坐标系
天球坐标系是用以描述自然天体和人造天体在空间的位置或方向的一种坐标系。依据所选用的坐标原点的不同可分为站心天球坐标系、地心天球坐标系和太阳系质心天球坐标系等。在经典的天文学中, 由于至绝大部分的自然天体的距离无法精确测定, 而只能精确测定其方向, 因而总是将天体投影到天球上, 然后再用两个球面角 ( θ , λ ) (\theta, \lambda) (θ,λ) 来表示其方向。而对于卫星而同其距离往往能精确测定, 因而既可用球面坐标 ( θ , λ , r ) (\theta, \lambda, r) (θ,λ,r) 来表示其位置, 也可用空间直角坐标来 ( X , Y , Z ) (X, Y, Z) (X,Y,Z) 表示其位置。在GPS 测量中使用较多的是地心天球赤道坐标系, 该坐标系的原点位于地球质心, X X X 轴指向春分点, Z Z Z 轴与地球自转轴重合, 指向北天极, Y Y Y 轴垂直于 X X X 轴和 Z Z Z 轴, 组成右手直角坐标系。由于存在岁差和章动, 因而北天极和春分点也有 “真” 和“平”之分。我们把仅顾及岁差而不顾及章动时的北天极和春分点称为平北天极和平春分点, 把同时顾及庐差和章动, 能反映其真实位置的北天极和春分点称为真北天极 和真春分点。
(1) 真地心天球赤道坐标系 (瞬时地心天球赤道坐标系)
我们把坐标原点位于地心, X X X 轴指向真春分点, Z Z Z 轴指向真北天极, Y Y Y 轴垂直于 X X X 轴和 Z Z Z 轴组成的右手坐标系称为真地心天球赤道坐标系或瞬时地心天球赤道坐标系。天文观测总是在真天球坐标系中进行的, 所获得观测值也是属于该坐标系的。然而由于岁在和章动的影响, 真天球坐标系中的三个坐标轴的指向在不断变化。在不同时间对空间某一固定天体 (例如无自行的恒星) 进行观测后所求得的天体坐标 ( α , δ ) (\alpha, \delta) (α,δ) 是不相同的, 因而不宜用该坐标系来编制星表, 表示天体的位置和方向。
(2)平地心天球赤道坐标系
我们把坐标原点位于地心, X X X 轴指向平春分点, Z Z Z 轴指向平北天极, Y Y Y 轴垂直于 X X X 轴和 Z Z Z 轴组成的右手坐标系称为平地心天球赤道坐标系。当然, 实际上, 岁差和章动是叠加在一起 的, 我们之所以要人为地把长期的平均运动 (岁差) 与在此基础上的许多微小的周期性变化 (章动) 分离开来, 是为了使坐标转换的概念和步骤更为清晰。在计算时也可以把它们合并在一起同时计算。
平天球坐标系的三个坐标轴的指向仍然是不固定的, 但是其变化规律已很简単, 可以方便地进行计算。显然我们也不宜用平天球坐标系来描述天体的位置和方向。
(3)协议地心天球赤道坐标系
天体的位置需要在一个固定不变的坐标系中来加以描述。从理论上讲, 这种天固坐标系是可以任意选择的, 只要坐标轴的指向不变就行。但是为了避免各国各行其是, 实际上总是通过协商最后由国际权威单位规定, 统一使用 。目前广为使用的协议天球坐标系是由 IAU 规定的国际天球坐标系 GCRS 和 BCRS, 前者的坐标原点位于地心,用于计算卫星轨道, 编制卫星星历; 后者的坐标原点位于太阳系质心, 用于计算行星的运行轨道, 编制星表。 国际天球坐标系的 X X X 轴指向 J 2000.0 J 2000.0 J2000.0 (JD = 2451545.0 ) =2451545.0) =2451545.0) 时的平春分点, Z Z Z 轴指向 J2000.0 时的平北天极, Y Y Y 轴垂直于 X X X 轴和 Z Z Z 轴组成右手坐标系。显然,这只是一种理论上的规定和定义, 国际天球坐标系的具体实现称为国际天球参考框架。国际天球参考框架是通过国际地球自转及参考系服务 IERS 采用 VLBI 观测所确定的一组河外射电源的方向来实现的。
GCRS 中的三个坐标轴指向空间三个固定方向,虽然坐标原点在绕日公转,但仍然是一个相当好的惯性坐标系, 我们通常将它称为准惯性坐标系。 GPS 卫星的轨道运动方程通常在 GCRS 中建立和解算,然后再通过坐标转换,换算至 ITRS 中去。
2. 地球坐标系
地球坐标系也称大地坐标系。由于该坐标系将随着地球一起自转, 也被称为地固坐标系。 地球坐标系的主要任务是用于描述物体在地球上的位置或在近地空间的位置。
根据坐标原点所处的位置的不同, 地球坐标系可分为参心坐标系和地心坐标系。在 GPS 测量中直接求得的坐标一般均为地心坐标, 既可采用空间大地坐标 B 、 L 、 H B 、 L 、 H B、L、H 的形式来表 示, 也可采用空间直角坐标 X 、 Y 、 Z X 、 Y 、 Z X、Y、Z 的形式来表示。为了讲清地球坐标系, 有必要首先介绍极移的基本概念。
2.1 极移
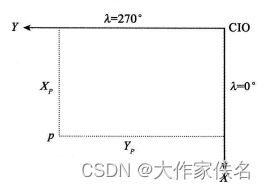
地球自转轴与地面的交点称为地极。由于地球表面的物质运动 (如洋流、海潮等) 以及地球内部的物质运动 (如地幔的运动), 会使极点 (严格地说应该是天球历书极) 的位置产生变化, 这种现象称为极移。任一时刻瞬时极的位置可以在一个特定的坐标系中用坐标分量 X p X_p Xp 和 Y p Y_p Yp 来表示, 如下图所示, 该坐标系的原点位于国际协议原点 C I O \mathrm{CIO} CIO (严格地讲是 IERS 的参考极), X X X 轴为起始子午线, Y Y Y 轴为经度为 27 0 ∘ 270^{\circ} 270∘ 的子午线。从理论上讲,该坐标系是一个 球面坐标系, 但是由于极移的值很小 ( < 1 ′ ′ ) \left(<1^{\prime \prime}\right) (<1′′), 因而完全可以把它看成是一个平面坐标系。目前,极移值 ( X p , Y p ) \left(X_p, Y_p\right) (Xp,Yp) 是由 IERS 通过 VLBI、SLR、 GPS、DORIS 等空间大地测量方法来精确测定并公布的 (见表 2-1) 。在新的 L 2 C \mathrm{L}_2 \mathrm{C} L2C 和 L 5 \mathrm{L}_5 L5 导航电文中给出了相应的短期预报值,供用户使用。
2.2 瞬时 (真) 地球坐标系
为了便于应用,在建立地球坐标系时, 我们要将坐标轴与地球上一些重要的点、线、面 (或平行)。例如,让 Z Z Z 轴与地球自转轴重 合 (或平行), 让 X X X 轴位于起始子午面与赤道面的交线上(或平行于该线) 等。然而由于存在极移, 瞬时地球坐标系中的三个坐标轴在地球本体内的指向是在不断变化的, 因此地面固定点 的坐标也会不断发生变化,显然,瞬时地球坐标系不宜用来表示点的位置。瞬时地极的坐标:
2.3 协议地球坐标系
为了使地面固定点的坐标保持固定不变, 就需要建立一个与地球本体完全固联在一起的坐标系。从理论上讲,这种坐标系也有许多种选择方法, 同样为防止出现各种坐标系, 仍然需要通过协商, 由国际上权威机构来统一作出规定, 这就是国际地球参考系 ITRS IUGG 的决议, ITRS 是由 IERS 来负责定义的,其具体规定如下:
(1)坐标原点位于包括海洋和大气层在内的整个地球的质量中心;
(2)尺度为广义相对论意义下的局部地球框架内的尺度;
(3)坐标轴的指向是由 BIH 1984.0 1984.0 1984.0 来确定的;
(4)坐标轴指向随时间的变化应满足“地壳无整体旋转”这一条件。
ITRS 是由 IERS 采用 VLBI、SLR、GPS、DORIS 等空间大地测量技术来予以实现和维持的, ITRS 的具体实现称为国际地球参考框架 ITRF。该坐标框架通常采用空间直角坐标系 ( X , Y , Z ) (X, Y, Z) (X,Y,Z) 的形式来表示。如果需要采用空间大地坐标 ( B , L , H ) (B, L, H) (B,L,H) 的形式来表示, 建议采用 GRS 80 椭球 ( a = 6378137.0 m , e 2 = 0.0069438003 ) \left.a=6378137.0 \mathrm{~m}, e^2=0.0069438003\right) a=6378137.0 m,e2=0.0069438003) 。ITRF 是由一组 IERS 测站的站坐标 ( X , Y , Z ) (X, Y, Z) (X,Y,Z) 、站坐标的年变化率 ( Δ X / (\Delta X / (ΔX/ 年, Δ Y / \Delta Y / ΔY/ 年, Δ Z / \Delta Z / ΔZ/ 年) 以及相应的地球定向参数 EOP 来 实现的, ITRF 是目前国际上公认的精度最高的地球参考框架。IGS 的精密星历就是采用这一框架。
随着测站数量的增加、观测精度的提高及观测资料的累积、数据处理方法的改进, IERS 也在不断对框架进行改进和完善。迄今为止, IERS 共建立公布了 12 个不同的 ITRF 版本。 这些版本用 ITRF y y { }_{y y} yy 的形式表示, 其中 y y \mathrm{yy} yy 表示建立该版本所用到的资料的最后年份。例如, ITRF 97 { }_{97} 97 表示该版本是 IERS 利用直到 1997 年底为止所获得的各类相关资料建立起来的。当然,公布和使用的时间是在 1997 年以后。这 12 个不同的 ITRF 版本分别是 I T R F 88 , I T R F 89 ITRF_{88}, \mathrm{ITRF}_{89} ITRF88,ITRF89 、 I T R F 90 \mathrm{ITRF}_{90} ITRF90、 I T R F 91 \mathrm{ITRF}_{91} ITRF91 、 I T R F 92 \mathrm{ITRF}_{92} ITRF92 、 I T R F 93 \mathrm{ITRF}_{93} ITRF93、 I T R F 94 \mathrm{ITRF}_{94} ITRF94、 I T R F 96 \mathrm{ITRF}_{96} ITRF96 、 I T R F 97 \mathrm{ITRF}_{97} ITRF97、 I T R F 2006 \mathrm{ITRF}_{2006} ITRF2006、 I T R F 2005 \mathrm{ITRF}_{2005} ITRF2005 和 I T R F 2008 \mathrm{ITRF}_{2008} ITRF2008 不难看 出, 在 1997 年以前, ITRF 几乎是每年更新一次。其后, 随着框架精度的提高而渐趋稳定, 版本的更新周期在逐渐增长。
2.4 世界大地坐标系
世界大地坐标系是美国建立的全球地心坐标系, 曾先后推出过 WGS60、WGS66、WGS72 和 WGS84 等不同版本。其中, WGS 84 于 1987 年取代 WGS 72 而成为全球定位系统广播星历所使用的坐标系,并随着 GPS 导航定位技术的普及推广而被世界各国所广泛使用。
根据讨论问题的角度和场合的不同, WGS 84 有时被视为是一个坐标系统, 有时则又被视为是一个参考框架, 而不像 ITRS 和 ITRF 那样可清楚地加以区分。作为一个坐标系统时, WGS 84 同样满足 IERS 在建立 ITRS 时所提出的四项规定, 也就是说, 从理论上讲, WGS 84 应该与 ITRS 是一致的。但是与 ITRF 不同。WGS 84 在很多场合下都采用空间大地坐标 ( B , L , H ) (B, L, H) (B,L,H) 的形式来表示点的位置, 这是因为 ITRS 和 ITRF 主要用于大地测量和地球动力学研究等领域,而 WGS 84 则较多地用于导航定位等领域, 在导航中用户更愿意用 ( B , L , H ) (B, L, H) (B,L,H)来表示点的位置, 此时应采用 WGS 84 椭球( a = 6378137.0 m , f = 1 / 298.257223563 a=6378137.0 \mathrm{~m}, f=1 / 298.257223563 a=6378137.0 m,f=1/298.257223563 )。
为了提高 WGS 84 框架的精度, 美国国防制图局 (DMA) 利用全球定位系统和美国空军 的 GPS 卫星跟踪站的观测资料, 以及部分 IGS 站的 GPS 观测资料进行了联合解算。解算时, 将 IGS 站在 ITRF 框架中的站坐标当做固定值, 重新求得了其余站点的坐标, 从而获得了更为精确的 WGS 84 框架。这个改进后的框架称为 WGS 84(G730), 其中括号里的 G 表示该框架是用 GPS 资料求定的,730 表示该框架是从 GPS 时间第 730 周开始使用的 (即 1994 年 1 月 2 日)。WGS 84(G730) 与 I T R F 92 \mathrm{ITRF}_{92} ITRF92 的符合程度达 10 c m 10 \mathrm{~cm} 10 cm 的水平。此后,美国对 WGS84 框架又进行过两次精化, 一次是在 1996 年, 精化后的框架称为 WGS 84(G873)。该框架从 GPS 时问第 873 周开始使用 (1996 年 9 月 29 日 0h)。1996 年 10 月 1 日美国国防制图局 DMA 并人新成立的美国国家影像制图局 NIMA (National Imagery and Mapping Agency), 此 后, NIMA 就用 WGS 84 (G873) 来计算精密星历。该星历与 IGS 的精密星历(用 ITRF 9 框架)之间的系统误差小于等于 2 c m 2 2001 2 \mathrm{~cm}^2 2001 2 cm22001 年, 美国对 WGS 84 进行了第三次精化, 获得了 WGS 84(G1150) 框架。该框架从 GPS 时间第 1150 周开始使用 (2002 年 1 月 20 日 0 h 0 \mathrm{~h} 0 h ), 与 I T R R F 2000 ITRRF_{2000} ITRRF2000 相符得很好, 各分量上的平均差异小于 1 c m 2 1 \mathrm{~cm}^2 1 cm2。
出自:《GPS测量与数据处理》第二章。