- VS2019+QT4.15+openCV4.5.1+CUDA加速
小小秀峰哥
python人工智能深度学习
文章目录前言一、软件安转以及注意事项二、CMake编译总结前言`最近公司有一个关于使用海康威视网络摄像头的目标检测的项目,发现使用openCV显示时,出现很大的延时,因此,只能使用cuda进行加速才能使显示达到实时,在进行编译时我发现很多问题,解决了好几天才完成编译一、软件安转以及注意事项1、Windows10系统2、VisualStudio2019与QT4.15(先安装)3、CUDA11.8、c
- 多版本cuda+多版本cudnn+gcc+cmake+opencv+darknet爬坑记录
LMM_AI
系统学习深度学习
本次针对darknet框架部署—centos7.x一、CUDA多版本安装1、很早前安装了很多cuda现在忘了步骤了,这里不再安装,下次再补上,可以看其他贴安装,记清楚自己的安装目录,一般默认在/usr/local/cuda(cuda10.0、cuda10.2),用哪个切换环境变量就行,很方便二、CUDNN版本安装1、下载cudnn并解压,官网上下载与CUDA相匹配的版本,下载难点需要注册个帐号,有
- RK3568中使用QT opencv(显示基础图像)
花落已飘
qtopencv开发语言
文章目录一、查看对应的开发环境是否有opencv的库二、QT使用opencv一、查看对应的开发环境是否有opencv的库在开发板中的/usr/lib目录下查看是否有opencv的库:这里使用的是正点原子的ubuntu虚拟机,在他的虚拟机里面已经安装好了opencv的库。二、QT使用opencv在QTpro文件中添加opencv的支持:QT+=coreguiCONFIG+=c++11#添加OpenC
- pyQT + OpenCV 的三个练习
Luzem0319
opencvpyqt人工智能
一、创建一个PyQt应用程序,该应用程序能够:使用OpenCV加载一张图像。在PyQt的窗口中显示这张图像。提供四个按钮(QPushButton):一个用于将图像转换为灰度图一个用于将图像恢复为原始彩色图一个用于将图像进行翻转一个用于将图像进行旋转当用户点击按钮时,相应地更新窗口中显示的图像。思路分析加载图像:使用OpenCV加载一张图像,并将其存储为类的一个属性,以便在后续操作中访问。显示图像:
- OpenCV中的图像处理函数详解
Luzem0319
opencv图像处理人工智能
在OpenCV中,图像处理函数是实现图像处理和计算机视觉任务的基础。下面将详细介绍六个重要的图像处理函数:二值化函数、自适应二值化函数、腐蚀函数、膨胀函数、仿射变换函数和透视变换函数。一、二值化函数功能二值化函数(cv2.threshold())用于将灰度图像转换为二值图像。二值图像中,每个像素只有两种可能的值(通常是0和255),分别代表黑色和白色。参数src:输入图像,应为灰度图像。thres
- OpenCV中的边缘检测和轮廓处理
Luzem0319
opencv人工智能计算机视觉
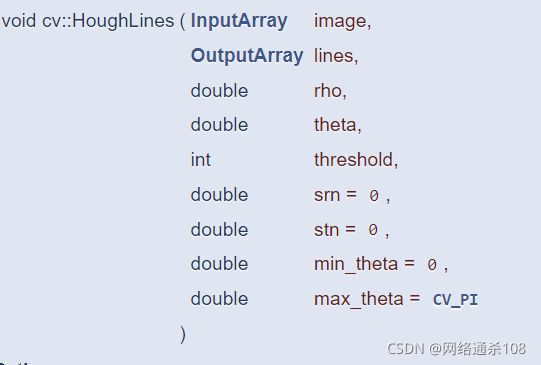
在图像处理和计算机视觉任务中,边缘检测和轮廓处理是非常重要的步骤。OpenCV库提供了多种函数来实现这些功能,包括Sobel算子、Laplacian算子、Canny算子、findContours函数、drawContours函数以及透视变换函数等。本文将详细介绍这些函数的功能、参数、返回值和应用。1.Sobel算子函数功能:Sobel算子用于计算图像灰度的近似梯度,梯度越大越有可能是边缘。参数:s
- RK3588上安装Ubuntu20.04修改源
chenzhy223
RK3588ubuntulinux运维
RK3588上安装Ubuntu20.04修改源1、参考资料2、更改镜像源2.1、选择源1、参考资料1、清华大学开源软件镜像站.2、Ubuntu软件仓库镜像使用帮助3、UbuntuPorts软件仓库镜像使用帮助4、unbuntu18.04apt-getupdate时报错armpackage找不到–华为服务器(已解决)5、opencv安装(解决libjasper-dev和MIPI接口)2、更改镜像源2
- python中cv是什么_python里面cv是什么意思
weixin_39639568
python中cv是什么
OpenCV(OpenSourceComputerVisionLibrary)开放源代码计算机视觉库,主要算法涉及图像处理、计算机视觉和机器学习相关方法。OpenCV其实就是一堆C和C++语言的源代码文件,这些源代码文件中实现了许多常用的计算机视觉算法。OpenCV由一系列C函数和C++类构成,它有C,C++,Python和java接口,当前SDK(SoftwareDevelopmentKit软件
- cv2 要下载哪个包
ivanfor666
pythonpython
cv2是OpenCV库的一个常见别名,用于计算机视觉任务。要安装OpenCV,你可以使用以下命令:bashCopycodepipinstallopencv-python这将从PyPI上下载并安装OpenCV的Python包。请确保你已经安装了pip工具,并且在执行该命令时,你正在使用与你的项目相对应的Python版本。如果你需要安装OpenCV的额外模块,你可以通过类似的方式安装它们。例如,如果你
- OpenCV 功能函数介绍 (二)
ኈ ቼ ዽ
人工智能算法
一,梯度处理的sobel算子函数功能:用于计算图像梯度(gradient)的函数参数:cv2.Sobel(src,ddepth,dx,dy,ksize=3,scale=1,delta=0,borderType=None)cv2.Sobel(输入图像,应该是灰度化后的图像输出图像的所需深度,:-1来表示与输入图像相同的深度x方向上的导数阶数,如果你想要计算x方向上的梯度,设置这个参数为1;如果你不关
- JavaCV拉取本地摄像头推送到RTMP
翻晒时光
视频直播JavaCV转码
话不多说,直接上源码packagecom.javacvstudy.javacvstudy;importjavax.swing.JFrame;importorg.bytedeco.javacpp.Loader;importorg.bytedeco.javacpp.avcodec;importorg.bytedeco.javacpp.opencv_core.IplImage;importorg.byt
- Ubuntu22.04系统下MVS运行海康威视工业相机
boss-dog
海康威视工业相机ubuntuMVS海康威视相机
之前的开发环境是Ubuntu16.04,最近因项目需求换到了Ubuntu22.04系统,安装了ROS2-humble,重新记录下开发过程。Ubuntu16.04系统可参考:VMware虚拟机中Ubuntu16.04系统下通过MVS运行海康威视工业相机Linux环境中对海康威视工业相机SDK进行二次开发(QT+CMake+Opencv+海康SDK)1.官网安装包下载https://www.hikro
- python 只用opencv吗,python – OpenCV:使用solvePnP来确定单应性
weixin_39934296
python只用opencv吗
在过去的几周里,我尝试学习纠正图像,并在这里的人们的帮助下,我已经设法更好地理解它.大约一个星期前,我设置了一个我想要纠正的测试示例(从上面查看图像).这很好(原始:http://sitedezign.net/original.jpg和纠正:http://sitedezign.net/rectified.jpg)功能T=cv2.getPerspectiveTransform(UV_cp,XYZ_g
- opencv python视频教程-OpenCV视频操作
weixin_37988176
使用工具Python3.5,使用库numpy;opencv1.用摄像头捕获视频cv2.VideoCapture():0为默认计算机默认摄像头,1可以更换来源;~~~importnumpyasnpimportcv2cap=cv2.VideoCapture(0)while(True):#captureframe-by-frameret,frame=cap.read()#ouroperationonth
- OpenCV播放视频
菜鸟小馒头
图像识别
使用opencv播放视频很容易,即循环的顺序读取视频中的每一帧,并且能够退出循环操作。#include#include#includeusingnamespacestd;usingnamespacecv;intmain(intargc,constchar*argv[]){//insertcodehere...constchar*ImageLocation="/Users/linwang/LinMo
- opencv 播放视频
smwhotjay
opencv
看资料cv播放视频是用VideoCapture。结果始终打不开文件,open(0);倒是可以打开摄像头。于是抛弃他的c++类,用c接口来播放。结果ok.//打开CvCapture*capture=cvCreateFileCapture("a.avi");if(!capture){return-1;}//视频信息intcam_width=(int)cvGetCaptureProperty(captu
- 关于cv2.solvePnP和cv2.solveP3P
ulimate_
opencvopencv人工智能计算机视觉
一、cv2.solvePnP()函数是OpenCV中的一种用于计算相机位姿的函数。它可以根据一组已知的二维坐标点和对应的三维坐标点,以及相机的内参和畸变系数,计算出相机的位姿(旋转和平移向量)。以下是cv2.solvePnP()函数的基本用法:cv2.solvePnP(objectPoints,imagePoints,cameraMatrix,distCoeffs[,rvec[,tvec]])参数
- 使用Python调用OpenCV中的solvePnP函数
WzisTypescript
pythonopencv开发语言OpenCV
OpenCV是一个广泛使用的计算机视觉库,它提供了许多用于处理图像和视频的功能。其中一个重要的功能是解决透视投影问题,也就是通过已知的3D点和对应的2D图像点来计算相机的位姿。在OpenCV中,solvePnP函数就是用于解决这个问题的。solvePnP函数使用了一种称为Perspective-n-Point(PnP)问题的算法,它可以估计相机的旋转和平移向量,从而确定相机在3D空间中的位置。这对
- OpenCV实现Python视频播放控制详解
夏勇兴
本文还有配套的精品资源,点击获取简介:本文详细介绍了如何使用OpenCV库在Python环境中播放视频,并展示了实现视频快进、后退控制的方法。首先通过cv2.VideoCapture()函数实现基础播放,然后利用set(cv2.CAP_PROP_FPS)函数控制播放速度实现快进和慢速播放,最后结合cv2.CAP_PROP_POS_MSEC属性实现精确的快进和后退。开发者可以根据实际需求选择合适的方
- 机器视觉python+opencv函数库:一
二师弟_k
opencvpython
对此图片进行操作:代码部分:第一步:importcv2#导入opencv函数库img_test=cv2.imread(r"C:\Users\12044\Desktop\test.png")#读取图像,img_test为原图名称cv2.imshow("image",img_test)#显示图像,引号中的内容为图像显示窗口的名称,即“image”cv2.waitKey(0)#等待事件触发,参数0表示永
- cv python_python里面cv是什么意思
weixin_40004659
cvpython
OpenCV(OpenSourceComputerVisionLibrary)开放源代码计算机视觉库,主要算法涉及图像处理、计算机视觉和机器学习相关方法。OpenCV其实就是一堆C和C++语言的源代码文件,这些源代码文件中实现了许多常用的计算机视觉算法。OpenCV由一系列C函数和C++类构成,它有C,C++,Python和java接口,当前SDK(SoftwareDevelopmentKit软件
- Python中opencv的一些函数及应用
灵封~
pythonopencv开发语言
Sobel算子函数功能:Sobel算子用于计算图像的梯度(变化率),常用于边缘检测。它通过对图像应用一个基于一阶导数的滤波器来强调图像中的边缘部分,特别是水平和垂直方向上的边缘。通过计算图像的梯度,可以获得图像中亮度变化较大的地方,这些地方通常是物体的边界。Sobel算子有两个方向的变体:SobelX:计算水平方向的梯度。SobelY:计算垂直方向的梯度。Sobel算子函数:cv2.Sobel()
- OpenCV相关函数
〖是♂我〗
opencv计算机视觉图像处理
一、Sobel算子函数(cv2.Sobel)功能Sobel算子是一个梯度算子,用于边缘检测。通过计算图像中像素的梯度,Sobel算子可以检测出水平和垂直方向上的边缘。参数src:输入图像。ddepth:输出图像的深度(如cv2.CV_8U,cv2.CV_64F)。一般为cv2.CV_8U(8位无符号整数)或cv2.CV_64F(64位浮动数)。dx:计算导数的x方向阶数,dx=1表示计算x方向的导
- 当在树莓派上运行 OpenCV 摄像头代码时出现摄像头打不开
李宇杰28
opencv开发语言
当在树莓派上运行OpenCV摄像头代码时出现“libv4l2:erroropeningvideodevice”报错,通常表示在打开视频设备(即摄像头)时遇到了问题。以下是一些可能的原因及解决办法:1.摄像头连接问题物理连接检查:首先确保摄像头与树莓派的物理连接是稳固的。对于树莓派摄像头模块(如官方的CSI摄像头),要检查连接线是否正确插入到树莓派对应的接口上,并且没有松动或损坏。如果是通过USB接
- 【Python篇】Python + OpenCV 全面实战:解锁图像处理与视觉智能的核心技能
半截诗
Pythonpython机器学习图像处理opencv计算机视觉视觉检测实战项目
文章目录PythonOpenCV入门与实战详解前言第一章:OpenCV基础操作1.1OpenCV简介1.1.1OpenCV的优势1.2安装OpenCV1.3OpenCV中的图像读取与显示1.3.1读取图像1.3.2显示图像1.3.3保存图像1.3.4示例:图像读取、显示与保存1.4图像的基本属性1.4.1图像通道第二章:OpenCV图像处理2.1图像的几何变换2.1.1缩放图像2.1.2图像旋转2
- C# OpenCV机器视觉:利用CNN实现快速模板匹配
pchmi
C#OpenCV机器视觉c#opencvcnn人工智能机器视觉OpenCvSharp
在一个阳光灿烂的周末,阿强正瘫在沙发上,百无聊赖地换着电视频道。突然,一则新闻吸引了他的注意:某博物馆里一幅珍贵的古画离奇失踪,警方怀疑是被一伙狡猾的盗贼偷走了,现场只留下一些模糊不清的监控画面,根本无法确定盗贼的行踪。阿强看着电视里那一团乱麻的线索,眼睛突然一亮,心中涌起一股热血:“要是我能帮警方找到盗贼,那可就太酷了!说不定还能得到博物馆的巨额悬赏,从此走上人生巅峰呢!”说干就干,阿强立马冲进
- opencv2.4中SVD分解的几种调用方法
weixin_34342992
人工智能matlabc#
原帖地址:http://blog.sina.com.cn/s/blog_6109b5d00101ag7a.html在摄影测量和计算机视觉中,考虑最优解问题时,经常要用到SVD分解。奇异值分解(singularvaluedecomposition,SVD)是一种可靠地正交矩阵分解法,但它比QR分解法要花上近十倍的计算时间。在matlab中,[U,S,V]=svd(A),其中U和V代表二个相互正交矩阵
- 基于OpenCV的答题卡识别系统(附全部源码)
Dong__ZW
opencv人工智能计算机视觉
本项目基于Python和OpenCV图像处理库,在Windows平台下开发了一个答题卡识别系统。系统运用精巧的计算机视觉算法,实现了批量识别答题卡并将信息导出至Excel表格的功能。这一解决方案使得答题卡的判卷过程变得轻便、高效且准确。首先,我们以Python语言作为开发基础,结合OpenCV图像处理库,为系统提供了强大的图像处理和分析能力。这使得我们能够在图像中准确地定位答题卡,检测填涂区域,以
- 【opencv】一文看懂opencv图像坐标系
Azanulbizar
opencvopencv计算机视觉人工智能
1坐标系的定义坐标系原点为图片左上角点;X轴水平向右,y轴垂直向下列cols沿水平方向变化,此方向上定义图像宽度width;行rows沿垂直方向变化,此方向上定义图像高度height将上述元素画在一张图上,如下图所示2坐标的遍历访问2.1常见结构的坐标定义cv::Mat(introws,intcols,inttype)入参顺序先行后列,即图像的高和宽,如画一张高200像素、宽300像素的图像//创
- python第三方库快速镜像下载
记录人生的苦短
python开发语言
方法一:pycharm终端或cmd中直接pipinstall库名镜像源:pipinstallopencv-python-ihttps://pypi.tuna.tsinghua.edu.cn/simple#或者pipinstall-ihttps://pypi.tuna.tsinghua.edu.cn/simpleopencv-pyhton方法二:pycharm终端中配置pipconfigsetglo
- web前段跨域nginx代理配置
刘正强
nginxcmsWeb
nginx代理配置可参考server部分
server {
listen 80;
server_name localhost;
- spring学习笔记
caoyong
spring
一、概述
a>、核心技术 : IOC与AOP
b>、开发为什么需要面向接口而不是实现
接口降低一个组件与整个系统的藕合程度,当该组件不满足系统需求时,可以很容易的将该组件从系统中替换掉,而不会对整个系统产生大的影响
c>、面向接口编口编程的难点在于如何对接口进行初始化,(使用工厂设计模式)
- Eclipse打开workspace提示工作空间不可用
0624chenhong
eclipse
做项目的时候,难免会用到整个团队的代码,或者上一任同事创建的workspace,
1.电脑切换账号后,Eclipse打开时,会提示Eclipse对应的目录锁定,无法访问,根据提示,找到对应目录,G:\eclipse\configuration\org.eclipse.osgi\.manager,其中文件.fileTableLock提示被锁定。
解决办法,删掉.fileTableLock文件,重
- Javascript 面向对面写法的必要性?
一炮送你回车库
JavaScript
现在Javascript面向对象的方式来写页面很流行,什么纯javascript的mvc框架都出来了:ember
这是javascript层的mvc框架哦,不是j2ee的mvc框架
我想说的是,javascript本来就不是一门面向对象的语言,用它写出来的面向对象的程序,本身就有些别扭,很多人提到js的面向对象首先提的是:复用性。那么我请问你写的js里有多少是可以复用的,用fu
- js array对象的迭代方法
换个号韩国红果果
array
1.forEach 该方法接受一个函数作为参数, 对数组中的每个元素
使用该函数 return 语句失效
function square(num) {
print(num, num * num);
}
var nums = [1,2,3,4,5,6,7,8,9,10];
nums.forEach(square);
2.every 该方法接受一个返回值为布尔类型
- 对Hibernate缓存机制的理解
归来朝歌
session一级缓存对象持久化
在hibernate中session一级缓存机制中,有这么一种情况:
问题描述:我需要new一个对象,对它的几个字段赋值,但是有一些属性并没有进行赋值,然后调用
session.save()方法,在提交事务后,会出现这样的情况:
1:在数据库中有默认属性的字段的值为空
2:既然是持久化对象,为什么在最后对象拿不到默认属性的值?
通过调试后解决方案如下:
对于问题一,如你在数据库里设置了
- WebService调用错误合集
darkranger
webservice
Java.Lang.NoClassDefFoundError: Org/Apache/Commons/Discovery/Tools/DiscoverSingleton
调用接口出错,
一个简单的WebService
import org.apache.axis.client.Call;import org.apache.axis.client.Service;
首先必不可
- JSP和Servlet的中文乱码处理
aijuans
Java Web
JSP和Servlet的中文乱码处理
前几天学习了JSP和Servlet中有关中文乱码的一些问题,写成了博客,今天进行更新一下。应该是可以解决日常的乱码问题了。现在作以下总结希望对需要的人有所帮助。我也是刚学,所以有不足之处希望谅解。
一、表单提交时出现乱码:
在进行表单提交的时候,经常提交一些中文,自然就避免不了出现中文乱码的情况,对于表单来说有两种提交方式:get和post提交方式。所以
- 面试经典六问
atongyeye
工作面试
题记:因为我不善沟通,所以在面试中经常碰壁,看了网上太多面试宝典,基本上不太靠谱。只好自己总结,并试着根据最近工作情况完成个人答案。以备不时之需。
以下是人事了解应聘者情况的最典型的六个问题:
1 简单自我介绍
关于这个问题,主要为了弄清两件事,一是了解应聘者的背景,二是应聘者将这些背景信息组织成合适语言的能力。
我的回答:(针对技术面试回答,如果是人事面试,可以就掌
- contentResolver.query()参数详解
百合不是茶
androidquery()详解
收藏csdn的博客,介绍的比较详细,新手值得一看 1.获取联系人姓名
一个简单的例子,这个函数获取设备上所有的联系人ID和联系人NAME。
[java]
view plain
copy
public void fetchAllContacts() {
- ora-00054:resource busy and acquire with nowait specified解决方法
bijian1013
oracle数据库killnowait
当某个数据库用户在数据库中插入、更新、删除一个表的数据,或者增加一个表的主键时或者表的索引时,常常会出现ora-00054:resource busy and acquire with nowait specified这样的错误。主要是因为有事务正在执行(或者事务已经被锁),所有导致执行不成功。
1.下面的语句
- web 开发乱码
征客丶
springWeb
以下前端都是 utf-8 字符集编码
一、后台接收
1.1、 get 请求乱码
get 请求中,请求参数在请求头中;
乱码解决方法:
a、通过在web 服务器中配置编码格式:tomcat 中,在 Connector 中添加URIEncoding="UTF-8";
1.2、post 请求乱码
post 请求中,请求参数分两部份,
1.2.1、url?参数,
- 【Spark十六】: Spark SQL第二部分数据源和注册表的几种方式
bit1129
spark
Spark SQL数据源和表的Schema
case class
apply schema
parquet
json
JSON数据源 准备源数据
{"name":"Jack", "age": 12, "addr":{"city":"beijing&
- JVM学习之:调优总结 -Xms -Xmx -Xmn -Xss
BlueSkator
-Xss-Xmn-Xms-Xmx
堆大小设置JVM 中最大堆大小有三方面限制:相关操作系统的数据模型(32-bt还是64-bit)限制;系统的可用虚拟内存限制;系统的可用物理内存限制。32位系统下,一般限制在1.5G~2G;64为操作系统对内存无限制。我在Windows Server 2003 系统,3.5G物理内存,JDK5.0下测试,最大可设置为1478m。典型设置:
java -Xmx355
- jqGrid 各种参数 详解(转帖)
BreakingBad
jqGrid
jqGrid 各种参数 详解 分类:
源代码分享
个人随笔请勿参考
解决开发问题 2012-05-09 20:29 84282人阅读
评论(22)
收藏
举报
jquery
服务器
parameters
function
ajax
string
- 读《研磨设计模式》-代码笔记-代理模式-Proxy
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
import java.lang.reflect.InvocationHandler;
import java.lang.reflect.Method;
import java.lang.reflect.Proxy;
/*
* 下面
- 应用升级iOS8中遇到的一些问题
chenhbc
ios8升级iOS8
1、很奇怪的问题,登录界面,有一个判断,如果不存在某个值,则跳转到设置界面,ios8之前的系统都可以正常跳转,iOS8中代码已经执行到下一个界面了,但界面并没有跳转过去,而且这个值如果设置过的话,也是可以正常跳转过去的,这个问题纠结了两天多,之前的判断我是在
-(void)viewWillAppear:(BOOL)animated
中写的,最终的解决办法是把判断写在
-(void
- 工作流与自组织的关系?
comsci
设计模式工作
目前的工作流系统中的节点及其相互之间的连接是事先根据管理的实际需要而绘制好的,这种固定的模式在实际的运用中会受到很多限制,特别是节点之间的依存关系是固定的,节点的处理不考虑到流程整体的运行情况,细节和整体间的关系是脱节的,那么我们提出一个新的观点,一个流程是否可以通过节点的自组织运动来自动生成呢?这种流程有什么实际意义呢?
这里有篇论文,摘要是:“针对网格中的服务
- Oracle11.2新特性之INSERT提示IGNORE_ROW_ON_DUPKEY_INDEX
daizj
oracle
insert提示IGNORE_ROW_ON_DUPKEY_INDEX
转自:http://space.itpub.net/18922393/viewspace-752123
在 insert into tablea ...select * from tableb中,如果存在唯一约束,会导致整个insert操作失败。使用IGNORE_ROW_ON_DUPKEY_INDEX提示,会忽略唯一
- 二叉树:堆
dieslrae
二叉树
这里说的堆其实是一个完全二叉树,每个节点都不小于自己的子节点,不要跟jvm的堆搞混了.由于是完全二叉树,可以用数组来构建.用数组构建树的规则很简单:
一个节点的父节点下标为: (当前下标 - 1)/2
一个节点的左节点下标为: 当前下标 * 2 + 1
&
- C语言学习八结构体
dcj3sjt126com
c
为什么需要结构体,看代码
# include <stdio.h>
struct Student //定义一个学生类型,里面有age, score, sex, 然后可以定义这个类型的变量
{
int age;
float score;
char sex;
}
int main(void)
{
struct Student st = {80, 66.6,
- centos安装golang
dcj3sjt126com
centos
#在国内镜像下载二进制包
wget -c http://www.golangtc.com/static/go/go1.4.1.linux-amd64.tar.gz
tar -C /usr/local -xzf go1.4.1.linux-amd64.tar.gz
#把golang的bin目录加入全局环境变量
cat >>/etc/profile<
- 10.性能优化-监控-MySQL慢查询
frank1234
性能优化MySQL慢查询
1.记录慢查询配置
show variables where variable_name like 'slow%' ; --查看默认日志路径
查询结果:--不用的机器可能不同
slow_query_log_file=/var/lib/mysql/centos-slow.log
修改mysqld配置文件:/usr /my.cnf[一般在/etc/my.cnf,本机在/user/my.cn
- Java父类取得子类类名
happyqing
javathis父类子类类名
在继承关系中,不管父类还是子类,这些类里面的this都代表了最终new出来的那个类的实例对象,所以在父类中你可以用this获取到子类的信息!
package com.urthinker.module.test;
import org.junit.Test;
abstract class BaseDao<T> {
public void
- Spring3.2新注解@ControllerAdvice
jinnianshilongnian
@Controller
@ControllerAdvice,是spring3.2提供的新注解,从名字上可以看出大体意思是控制器增强。让我们先看看@ControllerAdvice的实现:
@Target(ElementType.TYPE)
@Retention(RetentionPolicy.RUNTIME)
@Documented
@Component
public @interface Co
- Java spring mvc多数据源配置
liuxihope
spring
转自:http://www.itpub.net/thread-1906608-1-1.html
1、首先配置两个数据库
<bean id="dataSourceA" class="org.apache.commons.dbcp.BasicDataSource" destroy-method="close&quo
- 第12章 Ajax(下)
onestopweb
Ajax
index.html
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/
- BW / Universe Mappings
blueoxygen
BO
BW Element
OLAP Universe Element
Cube Dimension
Class
Charateristic
A class with dimension and detail objects (Detail objects for key and desription)
Hi
- Java开发熟手该当心的11个错误
tomcat_oracle
java多线程工作单元测试
#1、不在属性文件或XML文件中外化配置属性。比如,没有把批处理使用的线程数设置成可在属性文件中配置。你的批处理程序无论在DEV环境中,还是UAT(用户验收
测试)环境中,都可以顺畅无阻地运行,但是一旦部署在PROD 上,把它作为多线程程序处理更大的数据集时,就会抛出IOException,原因可能是JDBC驱动版本不同,也可能是#2中讨论的问题。如果线程数目 可以在属性文件中配置,那么使它成为
- 推行国产操作系统的优劣
yananay
windowslinux国产操作系统
最近刮起了一股风,就是去“国外货”。从应用程序开始,到基础的系统,数据库,现在已经刮到操作系统了。原因就是“棱镜计划”,使我们终于认识到了国外货的危害,开始重视起了信息安全。操作系统是计算机的灵魂。既然是灵魂,为了信息安全,那我们就自然要使用和推行国货。可是,一味地推行,是否就一定正确呢?
先说说信息安全。其实从很早以来大家就在讨论信息安全。很多年以前,就据传某世界级的网络设备制造商生产的交