场景交互与场景漫游-交运算与对象选取(8-1)
交运算与对象选取
在面对大规模的场景管理时,场景图形的交运算和图形对象的拾取变成了一项基本工作。OSG作为一个场景管理系统,自然也实现了场景图形的交运算,交运算主要封装在osgUtil 工具中在OSG中,osgUtil是一个非常强有力的工具,集合了场图形处理、几何体修改工具及高层次的遍历几个功能。
交运算
交运算(Intersection)本身是一个非常复杂的立体几何问题。当在阅读这一部分源代码时,读者会发现如果有非常丰富的立体几何思想见解,将能够很快理解源代码,如果没有的话,即使笔者在这里分析源代码也是没有用的。当然,作为一个应用者没有必要去过多关注底层是如何实现的。
关于交运算,OSG本身的实现也是比较局限的,但是对于普通应用已经足够了,可以用一个继承关系图表示出来,如图8-21所示。
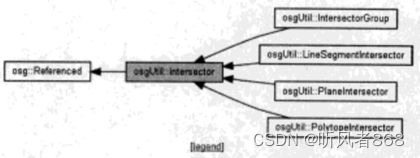
图8-21 osgUtil::Intersector 的继承关系及派生图
从继承关系图中可以看出,所有的交运算都共用一个父类osgUtil::Intersector类。下面对这个类的作用逐一说明。
- osgUtil::Intersector:是一个纯虚类它定义了相交测试的接口osgUtil库从osgUtil::Intersection继承了多个类,适用于各种类型的几何体(如线段、多边形等)。执行相交测试时,应用程序将继承自osgUtil::Intersector的某个类实例化,再将其传递给 osgUtil::IntersectionVisitor 的实例,并请求该实例返回数据以获取交运算的结果。
- osgUtil::LineSegmentIntersector继承自osgUtil::Intersector 类,用于检测指定线段和场景图形之间的相交情况,并向程序提供查询相交测试结果的函数。该类提供了一种定义射线的方法。它包括两个osg::Vec3实例,一个用于定义线段的起点,另一个用于定义终点。当交集测试被触发时,它将检测射线的相交情况并执行相应的操作。这个在示例显示位置及拾取示例中会用到,可以根据鼠标的位置初始化一个osgUtil::LineSegmentIntersector类的对象可以指定一个特定的线段来执行相交检测,在构造函数中即可初始化。
// 创建一个线段交集检测对象
osgUtil::LineSegmentIntersector::Intersections intersections:
viewer->computelntersections(x,y,intersections)通过相交运算,更多的是希望得到相交的点,可以通过申请一个迭代器来实现,代码如下:
// 得到相交交集的交点
for(osgUtil::LineSegmentIntersector::Intersections::iterator hitr = intersections.begin();hitr!=intersections.end();++hitr)
{
// 输入流
cout<<”Mouse in world X:”<getWorldIntersectPoint().x()<<” Y:”<getWorldIntersectPoint().y()<<” Z:”<getWorldIntersectPoint().z()< - osgUtil::PolytopeIntersector与osgUtil::LineSegmentIntersector类似,不过,该类用于检测由一系列平面构成的多面体的相交运算。当鼠标单击场景图形中某一区域,希望拾取到鼠标位置附近的一个封闭多面体区域时,osgUtil::PolytopeIntersector类最实用。
- osgUtil::PlaneIntersector,与osgUtil::LineSegmentIntersector类似,用于检测出一系列平面构成的平面的相交运算。
osgUtil::IntersectionVisitor是一个比较特殊的类,它不直接继承自osgUtil::Intersector,继承关系图如图8-22所示。
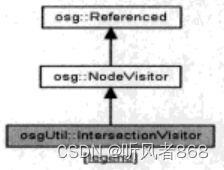
图8-22 osgUtil::IntersectionVisitor 的继承关系图
从继承关系图可以看出,它继承自osg::NodeVisitor,创建和触发机制与osg::NodeVisitor 实例大致相似。访问器需要维护一个进行交集测试的线段列表,而对于其中的每一条线段,访问器都会创建一个交点列表(osgUtil::IntersectVisitor::HitList 实例),它主要用于搜索场景图形中与指定几何体相交的节点。而最后相交测试的工作将在osgUtil::Intersector 的继承类中完成。在前面的自定义漫游操作器中,碰掩检测就是采用该类,最后的检测工作在osgUtil::LineSegmentIntersector 中完成,创建的过程如下:
// 创建一个交集访问器
osgUtil::IntersectVisitor ivXY;
// 根据新的位置得到两条线段检测
osg::ref_ptr lineXY = new osg::LineSegment(newPos, m_vPosition);
osg::ref_ptr lineZ = new osg::LineSegment(newPos1 + osg::Vec3(0.0,0.0,10.0), newPos1 - osg::Vec3(0.0,0.0,-10.0));
// 添加两条线段
ivXY.addLineSegment(lineZ.get());
ivXY.addLineSegment(lineXY.get());
// 开启交集检测
m_pHowViewer->getSceneData()->accept(ivXY);
交点列表(osgUtil::IntersectVisitor:HitList)的作用为:一条单一的线段可能与场景中的多个几何体实例(或者多次与同一个几何体)产生交集。对于每一条参与交集测试的线段,系统均会产生一个列表,这个列表包含了所有交集测试产生的 Hit 实例。如果没有监测到任何交集,该列表保持为空。
显示位置及拾取示例
显示位置及拾取示例的代码如程序清单 8-10所示
/******************************************* 显示位置及拾取示例 *************************************/
// pick 事件处理器
class CPickHandler:public osgGA::GUIEventHandler
{
public:
// 构造函数
CPickHandler(osg::ref_ptr updateText) :_updateText(updateText)
{
}
// 析构函数
~CPickHandler()
{
}
// 事件处理
bool handle(const osgGA::GUIEventAdapter &ea, osgGA::GUIActionAdapter &aa);
// pick
virtual void pick(osg::ref_ptr viewer, const osgGA::GUIEventAdapter &ea);
// 设置显示内容
void setLabel(const std::string &name)
{
_updateText->setText(name);
}
protected:
// 得到当前视图矩阵
osg::Vec3 position;
osg::Vec3 center;
osg::Vec3 up;
// 传递一个文字对象
osg::ref_ptr _updateText;
};
// HUD
class CreateHUD
{
public:
CreateHUD()
{
}
~CreateHUD()
{
}
// 创建HUD
osg::ref_ptr createHUD(osg::ref_ptr updateText)
{
// 创建一个相机
osg::ref_ptr hudCamera = new osg::Camera;
// 设置绝对帧引用
hudCamera->setReferenceFrame(osg::Transform::ABSOLUTE_RF);
// 设置正投影矩阵2D
hudCamera->setProjectionMatrixAsOrtho2D(0, 1280, 0, 1024);
// 设置视图矩阵
hudCamera->setViewMatrix(osg::Matrix::identity());
// 设置渲染顺序为POST
hudCamera->setRenderOrder(osg::Camera::POST_RENDER);
// 清除深度缓存
hudCamera->setClearMask(GL_DEPTH_BUFFER_BIT);
// 设置字体
string timesFont = "D:\\WorkAndStudy\\SDK\\VS2013\\OSG\\Data\\font\\cour.ttf";
// 设置位置
osg::Vec3 position(700, 900, 0.0);
osg::ref_ptr geode = new osg::Geode();
osg::ref_ptr stateset = geode->getOrCreateStateSet();
// 关闭光照
stateset->setMode(GL_LIGHTING, osg::StateAttribute::OFF);
//关闭深度测试
stateset->setMode(GL_DEPTH_TEST, osg::StateAttribute::OFF);
geode->addDrawable(updateText.get());
hudCamera->addChild(geode.get());
updateText->setCharacterSize(20.0f);
updateText->setFont(timesFont);
updateText->setColor(osg::Vec4(1.0f, 1.0, 1.0, 1.0));
updateText->setText("");
updateText->setPosition(position);
// 设置数据变量为DYNAMIC
updateText->setDataVariance(osg::Object::DYNAMIC);
return hudCamera.get();
}
};
/* 显示位置及拾取示例 */
void pickLineSegment_8_10(const string &strDataFolder);
/******************************************* 显示位置及拾取示例 *************************************/
// 事件处理函数
bool CPickHandler::handle(const osgGA::GUIEventAdapter &ea, osgGA::GUIActionAdapter &aa)
{
switch (ea.getEventType())
{
// 每一帧
case(osgGA::GUIEventAdapter::FRAME) :
{
osg::ref_ptr viewer = dynamic_cast(&aa);
// 得到视图矩阵
viewer->getCamera()->getViewMatrixAsLookAt(position, center, up);
if (viewer)
{
// 执行PICK动作
pick(viewer.get(), ea);
}
return false;
}
default:
return false;
}
}
// PICK动作
void CPickHandler::pick(osg::ref_ptr viewer, const osgGA::GUIEventAdapter &ea)
{
// 创建一个线段交集检测对象
osgUtil::LineSegmentIntersector::Intersections intersections;
std::string gdlist = "";
// 申请一个流
std::ostringstream os;
// 得到鼠标的位置
float x = ea.getX();
float y = ea.getY();
// 如果没有发生交集运算及鼠标没有点中物体
if (viewer->computeIntersections(x, y, intersections))
{
// 得到相交交集的交点
for (osgUtil::LineSegmentIntersector::Intersections::iterator hitr = intersections.begin(); hitr != intersections.end(); ++hitr)
{
// 输入流
os << "Mouse in World X:" << hitr->getWorldIntersectPoint().x() << " Y:" << hitr->getWorldIntersectPoint().y() << " Z:" << hitr->getWorldIntersectPoint().z() << endl;
}
}
// 输入流
os << "Viewer Position X:" << position[0] << " Y:" << position[1] << " Z:" << position[2] << endl;
gdlist += os.str();
// 设置显示内容
setLabel(gdlist);
}
void pickLineSegment_8_10(const string &strDataFolder)
{
// 创建Viewer对象,场景浏览器
osg::ref_ptr viewer = new osgViewer::Viewer();
osg::ref_ptr root = new osg::Group();
// 读取地形模型
string strDataPath = strDataFolder + "lz.osg";
osg::ref_ptr node = osgDB::readNodeFile(strDataPath);
osg::ref_ptr updateText = new osgText::Text();
CreateHUD *hudText = new CreateHUD();
// 添加到场景
root->addChild(node);
root->addChild(hudText->createHUD(updateText));
// 添加PICK事件处理器
viewer->addEventHandler(new CPickHandler(updateText));
// 优化场景数据
osgUtil::Optimizer optimizer;
optimizer.optimize(root);
viewer->setSceneData(root);
viewer->realize();
viewer->run();
}
运行程序,截图如图 8-23 所示。
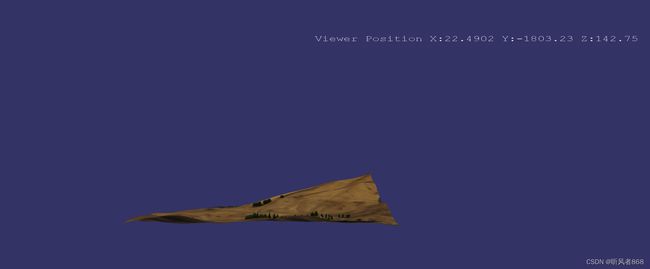
图8-23显示位置及拾取示例截图